Con uno steper motor (motore passo-passo) si possono costruire tanti gadget interessanti come, ad esempio, i robot, PCB drilling mill ecc. Il driver dello stepper motor è facile da progettare e permetterà di controllare uno stepper motor unipolare tramite la porta parallela del PC. Con uno stepper motor (motore passo-passo) si possono costruire tanti gadget interessanti come, ad esempio, i robot, PCB drilling mill ecc. Se non hai mai lavorato con gli stepper motor sicuramente ti divertirai realizzando questo progetto.
I motori passo-passo (stepper motor) sono diversi dai motori DC. Invece di girare come fanno i motori DC, gli stepper motor girano a una risoluzione specifica per ogni impulso. il motore che stiamo per utilizzare ha bisogno di 48 steps/pulses per completare una sola rotazione.
Un altro vantaggio dei motori passo-passo (stepper motor) è il fatto che la loro velocità di rotazione può essere raggiunta quasi istantaneamente, anche se si cambia la direzione di girare.
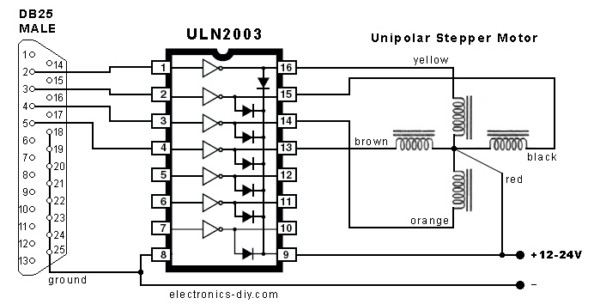
Per muovere il rotor (parte del motore passo-passo) avrai bisogno di un driver. Il driver è un circuito che applica una tensione ad una delle quattro bobine. Il driver può essere costruito con un circuito integrato (ad esempio ULN2003), quattro transistori darlington o quattro transistori di potenza (2N3055).
Il motore unipolare dovrebbe avere 5 o 6 sei connessioni a seconda del modello. Se il motore ha sei collegamenti devi unire i pin 1 e 2 (rosso) e collegarli ad una tensione di 12-14V. I pin rimasti: a1 (giallo), b1 (nero), a2 (arancio), b2 (marrone) dovrebbero essere collegati ad un driver (ULN2003).
Repost: agosto 2009

