I recenti drive a velocità variabile e progressiva sono stati progettati per aumentare il rendimento del prodotto e l’efficienza di un sistema. Un tale tipo di motore che può trarre beneficio del controllo digitale è il motore a riluttanza variabile (SR). Offre vantaggi di costo ed affidabilità sugli altri tipi di motore a velocità regolabile grazie alla sua semplice costruzione meccanica, alta efficienza ed alta densità di potenza fra le altre caratteristiche. D'altra parte un’alta onda di torsione, dovuta ad una duplice costruzione di prominenza, limita l’uso del motore SR in molte applicazioni.
Se desideri maggiori informazioni su questo prodotto Freescale, invia una richiesta ad Arrow utilizzando il seguente modulo.
Un altro vantaggio del motore SR è l’alta velocità di operazione (> 50,000 rpm). Questo significa che un motore più piccolo può essere usato per una potenza di output determinata, che riduce dimensione e peso dell’applicazione target. Un aspirapolvere è la tipica applicazione che può trarre vantaggio da questa caratteristica. Il motore SR ad alta velocità rende l’ aspirapolvere più piccolo ed agile, ed il rumore generato dall’onda di torsione è comparabile agli altri tipi di motori.
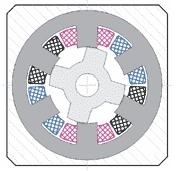
Il motore SR (motore a riluttanza variabile) è una macchina elettrica rotante dove stator e rotore hanno poli positivi. Lo stator che gira è comprensivo di un set di bobine ognuna delle quali è ruotata su un polo. Il rotore è laminato per minimizzare le perdite di correnti parassite. I motori SR differiscono nel numero di fasi di giri sullo stator. Ognuno di loro ha un certo numero di combinazioni appropriate di poli stator e di rotore. La Figura 1 illustra un tipico motore SR (motore a riluttanza variabile) a 2-fasi con una configurazione di poli 4/2 ( stator/rotore) ed un traferro passo passo. Il traferro passo passo è usato per eliminare zone morte, dove la torsione di motore è zero in un motore SR simmetrico, ed assicura uno start up di motore nella direzione corretta.

Figura 1 Motore SR 4/2 2-fasi
Il motore è eccitato da una sequenza di pulsazioni di corrente applicate ad ogni fase. Le fasi individuali sono eccitate di conseguenza, mentre costringendo il motore a ruotare. Le pulsazioni di corrente hanno bisogno di essere applicate alla rispettiva fase all’esatta posizione di rotore relativa alla fase eccitata. Quando una coppia di poli rotore è esattamente in linea con i poli stator della fase selezionata, si dice che la fase è in una posizione di allineamento, ovvero il rotore è nella posizione di massima induttanza di stator (vedi Figura 1). Se l'asse del rotore è in linea con l'asse interpolare dei poli stator, si dice che il rotore sia in una posizione allineata, ovvero il rotore è in una posizione di minima induttanza di stator.
Il profilo di induttanza dei motori SR è di forma triangolare, con induttanza massima quando l'induttanza allineata e minima quando non allineata. La Figura 2 illustra il profilo d’induttanza triangolare idealizzata di entrambe le fasi di un motore SR, con fase A evidenziata. Le singole fasi A e B sono spostate elettricamente di 180° relativamente l'un l'altra. Quando si avvia la rispettiva fase, l'intervallo è chiamato dwell angle (θdwell). Esso è definito dagli angoli di curvatura di accensione (θon) e spegnimento (θoff).
Quando la tensione è applicata alla fase di stator, il motore crea torsione nella direzione dell'induttanza crescente. Quando la fase è stimolata nella sua minima posizione di induttanza, il rotore si sposta nella posizione imminente di massima induttanza. Il movimento è definito dalle caratteristiche di magnetizzazione del motore. Un tipico profilo di corrente per una tensione di fase continua è mostrato in Figura 2.

Figura 2 Fase d’Induttanza Ideale e Profilo di Corrente
Per una fase continua di tensione la fase di corrente è al suo massimo nella posizione dove l'induttanza comincia ad aumentare. Questo corrisponde alla posizione dove il rotore ed i poli di stator iniziano a sovrapporsi. Quando la fase termina, la fase di corrente si azzera. La fase di corrente presente nella regione dell'induttanza decrescente genera una torsione negativa. La torsione generata dal motore è controllata dalla fase di tensione applicata e dalla definizione appropriata di angoli di accensione e spegnimento.
Il motore SR (motore a riluttanza variabile) richiede posizione di retroazione per la fase di commutazione del motore. In molti casi, questo requisito è indirizzato usando sensori di posizione, come codificatori, sensori di spazio, ecc. Inoltre, perfezionare sensori meccanici aumenta i costi e diminuisce l'affidabilità del sistema.
Tradizionalmente, gli sviluppatori del controllo di movimento hanno tentato di abbassare i costi di sistema riducendo il numero di sensori. È stata sviluppata una varietà di algoritmi per il controllo senza sensori, la maggior parte comporta l’estimazione del collegamento di flusso. Questi metodi calcolano l’effettiva fase del collegamento di flusso e sfruttano tale relazione per la stima della posizione . Lo svantaggio principale di tutti questi metodi è che la stima del collegamento di flusso è basata su una conoscenza precisa della fase di resistenza. Inoltre, la fase di resistenza varia significativamente con la temperatura che produce errori di integrazione non desiderati, specialmente a bassa velocità. Questi errori di integrazione causano una stima erronea della posizione.
Un altro metodo per la stima sensorless di posizione è basata sulla rilevazione di fase della corrente massima. Il principio di questo metodo può essere visto in Figura 2. La fase inizia ad essere eccitata nel momento che corrisponde all’ampiezza di corrente desiderata. La corrente comincia ad aumentare finché poli di stator e poli di rotore cominciano a sovrapporsi. A questo punto, la fase di corrente raggiunge il suo massimo. Poiché noi conosciamo la posizione esatta del rotore, noi possiamo valutare la posizione del rotore basata su questa corrente massima. Se conosciamo la corrente massima, si memorizza il tempo massimo. Conoscendo il tempo di due correnti massime consecutive, possiamo calcolare il periodo di commutazione ed i corrispondenti tempi di accensione/spegnimento. La corrente massima può essere individuata dal circuito esterno, o usando un potente controller di segnale digitale, è può essere valutata direttamente da software.
Il metodo della corrente massima ha il vantaggio di essere indipendente dai parametri di motore. Tutto ciò che noi abbiamo bisogno di sapere è la posizione del rotore alla massima corrente. Un altro vantaggio è che l'algoritmo di rilevazione di corrente massima è molto semplice paragonato al metodo della stima del flusso di collegamento. Il metodo della corrente massima può essere usato a velocità molto alte, mentre il numero basso di esempi di corrente per il calcolo di flusso limita la precisione del metodo del collegamento di flusso . A causa del principio di conduzione, il metodo di corrente massima può essere usato solamente con controllo di tensione, poiché nel controllo di corrente noi perdiamo informazioni sulla corrente massima.
Anche se la tecnica di controllo è piuttosto semplice se perfezionata digitalmente senza componenti esterni, richiede un microcontroller (MCU) potente. Questo MCU deve essere capace di fornire esempi di fase di corrente e calcolare la corrente massima molto veloce. Per esempio, in un motore SR a 2 fasi che va a 60,000 rpm, il periodo di commutazione è solamente 250 µs. Per guadagnare precisione sufficiente nella rilevazione della corrente massima, la fase di corrente deve essere valutata almeno ogni 5 µs.
Il controller di segnale digitale MC56F8006 (DSC) è una buona scelta per questa applicazione. Il 56F8006 è un membro della famiglia DSC basata su core 56800E che combina su un singolo chip la potenza di elaborazione di un DSP e la funzionalità di un MCU con un set flessibile di periferiche per creare una soluzione estremamente economica. Questi controller ibridi offrono molte periferiche dedicate, come modulazione a larghezza d’impulso (PWM), convertitori da analogico-digitale (ADC), timer, periferiche di comunicazione (SCI, SPI I2C) e flash su chip e RAM.
Nella Figura, è mostrata un’implementazione digitale del calcolo dell’algoritmo della corrente massima in un’applicazione di controllo del motore SR (motore a riluttanza variabile) sensorless ad alta velocità per aspirapolvere. L’applicazione soddisfa le specifiche di rendimento seguenti:
- Controllo sensorless per motore SR 2 fasi ad alta velocità basato sulla rilevazione di corrente massima
- Rilevazione di Corrente continua da Convertitore analogico-digitale integrato
- Software di valutazione di corrente massima
- Progetto per adattarsi ad applicazioni di aspirapolvere
- Testato con un motore SR 2 fasi disegnato per 60,000 rpm
- Singola direzione di rotazione dovuta alla costruzione asimmetrica del motore 2fasi SR
- Controllo velocità ciclo aperto
- Accensione ad ogni posizione usando un algoritmo di allineamento e brevettato (Brevetto N.ro US6448736 B1)
- Il tempo di accensione e la massima velocità dipendono dai parametri del motore SR
La Figura 3 illustra il concetto di sistema che incorpora uno stadio di alto voltaggio a 2 fasi SR, un motore SR 2 fasi ed una scheda controller MC56F8006 che esegue l'algoritmo di controllo. In risposta all'interfaccia utente e segnali feedback, il sistema genera segnali PWM per lo stadio di alto voltaggio SR 2 fasi. Le onde di alto voltaggio generate dalla DC all'invertitore di Corrente alternata sono applicate al motore.

Figura 3 - Concetto di Sistema
L’intero stato dell’applicazione è controllato da una applicazione di stato macchina eseguita in un ciclo di background. L’applicazione di stato macchina consiste di init, stop, allineamento, start up, lancio e stati di errore.
by Pavel Grasblum, Ph.D., Freescale Semiconductor, Inc.
RICHIESTA DI CONTATTO
Se desideri maggiori informazioni su questo prodotto Freescale, invia una richiesta ad Arrow utilizzando il seguente modulo.
Leggi la versione inglese: Digital Control of Sensorless High-Speed SR Motor Drives 1/2
