
L’elettronica, dapprima in ambito industriale e della difesa, poi nel mondo consumer, si è evoluta grazie all'utilizzo di sensori. Ogni giorno chi lavora nel mondo della ricerca prova ad inventare sensori nuovi, più performanti, che lasciano a progettisti (e smanettoni) la possibilità di sperimentare nei contesti più disparati. Ma c’è anche chi li perfeziona, rendendoli più appetibili in dimensioni, dissipazione, accuratezza, etc. In questo articolo, tra i tanti, parleremo di quelli per la visione e ci occuperemo proprio dei CCD e del loro campo di applicazione nella visione e rilevazione delle immagini. Siete pronti?
Introduzione
Come dicevamo in apertura, il mondo dell’elettronica, dapprima quello in ambito industriale e della difesa, ma sempre più anche nel mondo consumer, è guidato e condizionato dall’utilizzo di sensori (in realtà il termine tecnico è trasduttori) di qualsiasi tipologia. Basti pensare ad un semplice cellulare che prima era un qualcosa di diabolico in grado di telefonare (che banalità!?), mentre oggi fa di tutto con sensori di accelerazione, giroscopi, fotocamere, schermi touch, e chi più ne ha più ne metta, e qualche modello telefona pure (wow!). Ogni giorno c’è chi lavora nel mondo della ricerca provando ad inventare sensori nuovi, in grado di captare le grandezze fisiche più impensabili e trasformarle in segnali elettrici lasciando a progettisti (e smanettoni) la possibilità di utilizzarli nei contesti più disparati. Ma c’è anche chi lavora nel perfezionamento di quelli esistenti, rendendoli più appetibili in termini di dimensioni, dissipazione, accuratezza, etc. Uno di questi sensori è quello per la visione, ossia le camere (fotocamere o videocamere?!?! Sono solo punti di vista del trigger). A dominarla tra questi sensori abbiamo due tecnologie: CCD vs CMOS. Vi suonano familiari? Beh la tecnologia CMOS è quella alla base della maggior parte dei chip integrati mentre quella CCD è praticamente adoperata solo per i sensori di visione.
Prima di tutto, partiamo dal nome CCD, acronimo inglese di Charge-Coupled Device (Dispositivo ad accoppiamento di carica) che già fa intendere un po’ il meccanismo di funzionamento. Il principio di funzionamento, infatti, si basa su un effetto dovuto alla carica. In particolare l’immagine digitale che viene acquisita è data dalla matrice di numeri ottenuti tramite la trasduzione in valori numerici della quantità di energia che, emessa o riflessa da un oggetto, è stata catturata dal sensore sotto forma di carica elettrica. I sensori CCD vengono detti anche dispositivi a trasferimento di carica poiché i pixel (pixel deriva dalla contrazione di picture element e sta ad indicare l’elemento base dell’immagine digitale) di cui sono composti hanno la caratteristica di trasferire la carica in modo sequenziale tra loro.
![Figura 1 Schematizzazione della struttura fisica dei pixel (fonte: [1])](/files/u27482/CCD_figura1_strutturafisica.png)
Figura 1 Schematizzazione della struttura fisica dei pixel [1]
Il sensore (figura 2) è costituito da una piastrina in silicio sulla quale vi è un grigliato che la suddivide in tanti elementini detti appunto pixel. I sensori CCD sono riconducibili a due grandi macro categorie [1]: i sensori matriciali ed i sensori lineari. La differenza sostanziale è che, mentre i sensori matriciali presentano un grigliato costituito da tante linee e tante colonne (ad esempio i sensori adoperati nelle fotocamere), nei sensori lineari (o linear array, figura 3) vi è un’unica riga di pixel.
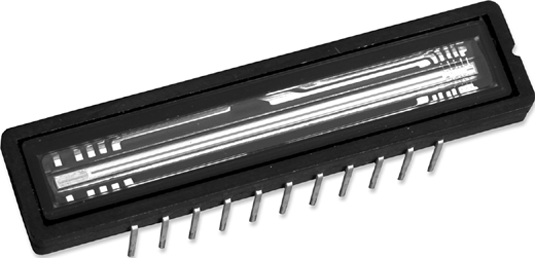
Figura 2 Esempio di Sensore lineare CCD
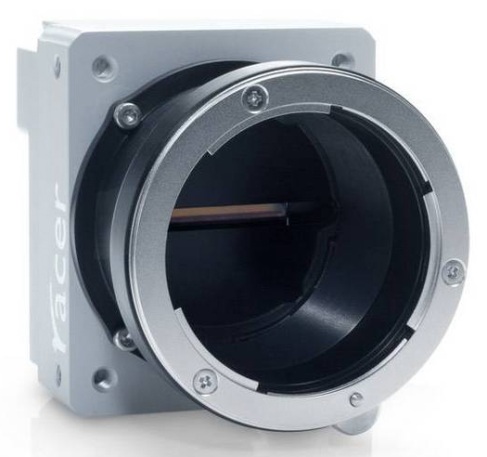
Figura 3 Esempio di camera CCD lineare
Principio di funzionamento
Il sensore CCD ricopre, come già detto, la funzione di catturare l’energia che incide sui pixel che presenteranno dunque determinate proprietà di fotosensibilità. La trasformazione dell’energia in un valore numerico sarà effettuata tramite una opportuna fase di elaborazione. Lo schema di un sensore lineare (figura 4) è costituito da un array di pixel in sequenza e da un convertitore A/D (ADC). Il sensore svolge la funzione di acquisizione della carica e al termine del tempo di integrazione si comporta come un registro a scorrimento nella direzione del convertitore. L’uscita dell’informazione, ovvero l’uscita del ADC, viene codificata ottenendo il risultato digitale (il numero di bit utilizzati per la conversione può dipendere dalle esigenze, ma in linea generale avviene una conversione su 8 bit, dunque 256 livelli).
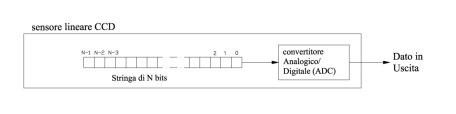
Figura 4 Sensore lineare CCD (schema a blocchi)
Il principio del trasferimento di carica viene schematizzato in figura 5 considerando due pixel consecutivi, denominati i e i+1, e le diverse situazioni che si susseguono temporalmente.
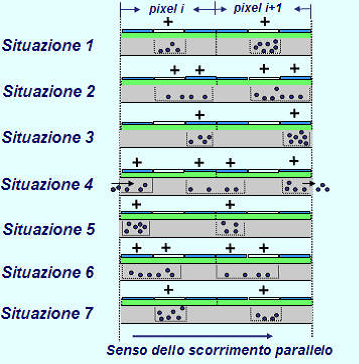
Figura 5 Trasferimento di carica tra pixel: schematizzazione
- Situazione 1: nei due pixel i e i+1 gli elettrodi centrali sono polarizzati positivamente confinando gli elettroni nelle regioni sottostanti.
- Situazione 2: nei due pixel i due elettrodi di destra vengono polarizzati positivamente allargando le regioni occupabili dagli elettroni.
- Situazione 3: viene tolta la tensione ai due elettrodi di centro e le regioni si restringono alle sole zone polarizzate.
- Situazione 4: gli elettrodi di sinistra vengono polarizzati positivamente e con lo stesso meccanismo si ha un trasferimento di carica.
- Situazione 5: viene tolta la tensione ai due elettrodi di destra e, in tutti i pixel, gli elettroni si raccolgono nelle regioni al di sotto degli elettrodi di sinistra.
- Situazione 6: viene data tensione agli elettrodi di centro.
- Situazione 7: viene tolta tensione agli elettrodi di sinistra e gli elettroni si raccolgono sotto la regione polarizzata.
Poiché in generale le immagini vengono acquisite con una certa continuità (ritorniamo al trigger, ossia alla frequenza di acquisizione delle immagini), allora si deduce che il sensore deve svuotarsi in modo completo della carica accumulata durante l’acquisizione in modo tale da consentire la successiva acquisizione. Il tempo di svuotamento è quindi un fattore di merito del sensore stesso (è correlato di fatto alla frequenza di acquisizione massima) ed insieme ad altri fattori ne può determinare la scelta.
Una tecnica per velocizzare il trasferimento di carica consiste nell'adoperare due registri ausiliari nei quali viene trasferita la carica acquisita. In particolare in un registro finiranno i valori di carica relativi ai pixel nelle posizioni pari e nell’altro registro le posizioni dispari. In tal modo il tempo necessario allo scorrimento dei registri viene praticamente dimezzato.
Esistono in commercio anche sensori con particolari sistemi di svuotamento più sofisticati ad esempio dividendo l’array su due registri e poi svuotando ogni registro in due direzioni in modo tale da ridurre a ¼ la velocità di svuotamento.
Un’ulteriore classificazione dei sensori CCD può essere effettuata in base alla cromaticità, infatti esistono sensori chiamati di tipo RGB (Red-Green-Blue, ovvero i tre colori principali per la fisica). In tali sensori ogni pixel è costituito da 3 elementini a cui sono rispettivamente applicati 3 filtri per le frequenze del rosso, del verde e del blu. La struttura di una camera lineare CCD RGB è data dalla presenza di 4 linee di pixel (come 4 singoli sensori lineari) ognuna delle quali risulta sensibile ad una differente frequenza della radiazione luminosa (monocromatica, rossa, verde e blu). I sensori RGB matriciali vengono realizzati con un solo sensore, al quale è applicato un filtro matriciale, in cui ogni elemento rende l’area sottostante (singolo pixel o più pixel dipende dalla qualità del sensore) sensibile ad una differente radiazione luminosa. La disposizione ottimale dei filtri RGB sul reticolo è una lunga trattazione (un esempio è il filtro di Bayer in figura 6 su una area di 2x2 pixel) ed in commercio ci sono sensori RGB matriciali con differente tecniche di filtraggio.
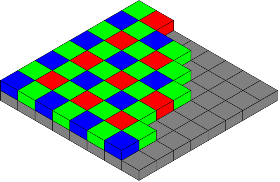
Figura 6 Schematizzazione del filtro di Bayer applicato ad un sensore matriciale
Parametri caratteristici
I parametri fondamentali di un sensore CCD possono essere schematizzati come segue:
- efficienza quantica: percentuale tra gli elettroni raccolti ed il numero di fotoni incidenti sulla superficie;
- efficienza di raccolta della carica;
- efficienza di trasferimento della carica;
- linearità della risposta ovvero la capacità di un rilevatore di fornire sempre un segnale proporzionale all’intensità della radiazione incidente;
- non uniformità della risposta ovvero la deviazione della risposta dei singoli pixels da quella teorica sotto le medesime condizioni di illuminazione. Nel caso ideale la risposta dovrebbe essere uniforme ma a causa del processo di fabbricazione e dei suoi difetti ciò non avviene nella realtà;
- intervallo dinamico: è definito come il logaritmo in base 10 del rapporto fra il massimo e il minimo segnale rilevabile dal sensore, ovvero rappresenta il numero di livelli di grigio effettivi nella rappresentazione digitale del segnale a valle del convertitore A/D.
Come si osserva, alcuni di questi parametri sono caratteristici della natura microelettronica del sensore e della proprietà di fotosensibilità (efficienza quantica, efficienza di raccolta, efficienza di trasferimento). I sensori CCD presentano anche un determinato livello di rumore le cui cause possono essere molteplici. Esempi di rumore presenti in tali sensori possono essere categorizzati come segue:
- rumore nell’array con dipendenza temporale e/o spaziale: rumore di bias, corrente di buio (dark current) e rumore termico (thermal noise);
- rumore nello stadio di uscita del CCD: rumore shot (shot current noise), flicker noise (pink noise), rumore termico (Johnson noise) e rumore di reset (Johnson noise nella resistenza del canale del FET di reset);
- rumore nel sistema di controllo e conversione A/D: rumore nell’elettronica di trattamento del segnale video e di pilotaggio del sensore, rumore di quantizzazione.
Nonostante abbia elencato tutte queste cause che inducono rumore nel sensore CCD, esso risulta in genere meno rumoroso rispetto ai sensori in tecnologia CMOS, anche nelle condizioni critiche di funzionamento con scarsa illuminazione.
Applicazioni
Le camere di tipologia lineare trovano larga applicazione nel campo industriale dove è richiesta l’ispezione visiva o il rilevamento (presenza e/o posizione) di oggetti in qualsiasi fase del ciclo di produzione. Basti pensare ai sensori di posizione degli oggetti su di una catena di montaggio, oppure al rilievo di imperfezioni di processo su di una superficie come la presenza di grumi o imperfezioni di verniciatura di una lastra. Invece le camere di tipo matriciale vengono adoperate sia nel mondo consumer (i sensori di alcune fotocamere reflex, oppure le famose telecamere ad alta velocità) sia nelle applicazioni dove è necessaria un’immagine completa (ad esempio il riconoscimento di una targa nei sistemi Tutor dell’autostrada) e soprattutto nell’astronomia, dove i sensori CCD sono di gran lunga preferiti ai CMOS. È doveroso sottolineare che in qualsiasi applicazione la camera ricopre solo un ruolo in un sistema che deve essere dotato necessariamente di sistemi ottici (similmente agli obiettivi che si montano ad una fotocamera reflex) e di un software di gestione che rende l’applicazione valida (gestione delle acquisizioni, algoritmo di elaborazione delle immagini, etc), altrimenti si rimane solo con un sacco pieno di uni e zeri! In altri casi si ricorre all’utilizzo di due o più camere (di tipologia sia lineare sia matriciale) per la realizzazione di sistemi di visione tridimensionali, da cui algoritmi di triangolazione per la determinazione degli oggetti nello spazio. Qui mi fermo su questo argomento, lasciando ai più curiosi qualche documento facilmente reperibile in rete da cui ho tratto gran parte delle informazioni.
Riferimenti:
[1] Riccardo Galetto, CAMERE DIGITALI PER RIPRESE AEREE E TERRESTRI, Università di Pavia
[2] Mauro Focardi, Corso di Tecnologie Spaziali: Il rumore nei rivelatori CCD e nell’elettronica di una camera CCD, Università di Firenze, Dr. Polo Scientifico di Sesto F.no, 14 febbraio 2008
[3] “Properties of CCD-Cameras”, THETA SYSTEM Elektronik GmbH, Rathausstr. 13, D-82194 Gröbenzell
[4] “Black-and-White CCD Camera System” , Techno World
[5] Dave Litwiller, CCD vs. CMOS: Facts and Fiction, Dalsa, www.dalsa.com
Foto di copertina Image credits: Specinst.com
Articoli correlati:
CCD o CMOS? Alcuni parametri a confronto.
Le diverse tipologie di sensori ottici


molto interessante ed esauriente!
grazie per il tuo commento! mi fa molto piacere 🙂