
Primo di una serie di articoli che presenterà come realizzare una macchina telecomandata che tramite un sensore ottico segue un percorso ed evita gli ostacoli frontali.
Questo è l'articolo introduttivo di in progetto molto complesso ed interessante che ci porterà in varie puntate a realizzare un modellino telecomandato con un discreto livello di autonomia.
In questo articolo verrà presentato il progetto da un punto di vista funzionale introducendo il progetto tramite schemi a blocchi.
Nel secodo articolo ci occuperemo in dettaglio della parte hardware del progetto, illustrando i componenti necessari ed il loro utilizzo.
Nella terza ed ultima parte presenteremo il software di controllo necessario per la logica di controllo del modellino.
Premesso che i componenti usati ed il software di controllo sono di facile reperibilità e non hanno un costo elevato vediamo a livello funzionale cosa intendiamo fare.
Lo schema a blocchi dell'intero sistema è mostrato nella figura sottostante.
.png)
Da sinistra a destra abbiamo:
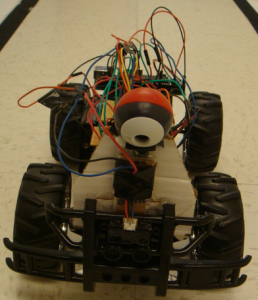
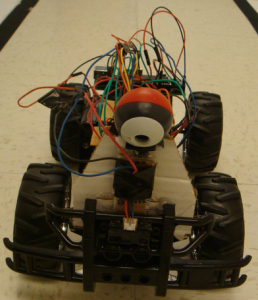
- il sistema per l'acquisizione dei dati per la gestione autonoma del modellino. Quindi il sensore ottico (Camera) usato per interpretare il percorso da seguire ed il sensore di distanza usato per evitare gli ostacoli frontali.
La principale difficoltà in questo tipo di applicazioni è il processamento dei dati provenienti dai sensori poichè l'analisi delle immagini in tempo reale richiede una certa potenza di calcolo o funzioni altamente ottimizzate cosa non sempre compatibile con un microcontrollore (MCU).
- il microcontrollore fa da tramite tra i dati acquisiti tramite i sensori e la parte maccanica del modellino. Supponendo di non avere competenze in campo meccanico il modellino con tutto il necessario per farlo muovere da un punto di vista meccanico lo procureremo già pronto. Al microcontrollore spetterà dunque il difficile compito di processare i dati in tempo reale o comunque nel più breve tempo possibile di modo da produrre i comandi di controllo per il motore per controllare il movimento del modellino.
- il circuito H-bridge (il cui dettaglio come già detto sarà esposto nel prossimo articolo) serve per controllare il movimento del motore in entrambe le direzioni in base alla polarità della tensione fornita del microcontrollore. L'optoisolatore serve per separare il microcontrollore dal motore DC per evitare che picchi di corrente da questo facciano danni sul microcontrollore. L'optoisolatore fornisce sostanzialmente un isolamento galavanico fra le parti.
Per quanto riguarda la parte software invece lo schema a blocchi del codice di controllo e riportato sotto.
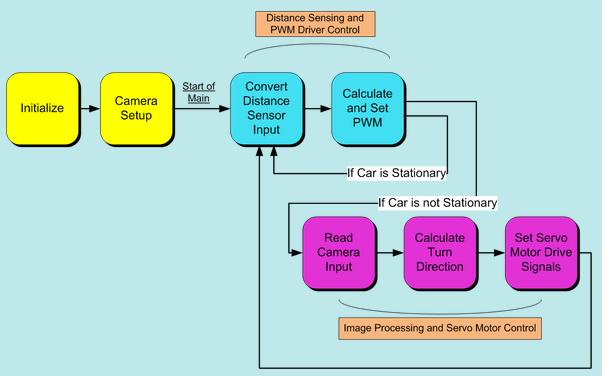
Ci sono tre parti fondamentali, da sinistra a destra:
- una prima parte che serve per inizializzare i vari componenti all'avvio
- una seconda parte inserita in un ciclo sempre attivo che converte i dati provenienti dai sensori
- una terza parte, anche questa inserita in un ciclo sempre attivo, che valuta i dati provenienti dai sensori precedentemente convertiti per decidere quali azioni intraprendere
Quindi non ci sono routine di interupt ad eccezione di quella che genera il segnale di clock per la sincronizzazione. In tal modo il ciclo presentato sopra usa in modo incessante le capacità di calcolo del microcontrollore riducendo al minimo eventuali latenze.
Vedremo meglio nella terza fase come ottimizzare il software di modo da eseguire tutte le operazioni necessarie in un tempo ridotto di modo da ottenere una risposta del sistema adeguatamente rapida agli ingressi provenienti dai sensori.
Abbiamo presentato lo schema a blocchi dell'intero progetto distinguendo parte hardware (che sarà presentata nel prossimo articolo) e parte software (che sarà trattata nell'ultimo articolo) di modo da dare un primo quadro del tutto. In tal modo chi fosse interessato potrà dedicarsi alla lettura dei prossimi articoli, in cui scenderemo molto più nel dettaglio delle varie parti.
Le premesse sono molto interessanti e vedremo che anche i dettagli delle varie soluzioni proposte sono altrettanto interessanti, quindi tenetevi sintonizzati per il prossimo articolo in cui presenteremo il dettaglio della parte hardware del nostro piccolo automa automobilistico 


Molto interessante, stavo proprio cercando qualcosa del genere. Grazie!