Questo progetto ha lo scopo di realizzare un alimentatore utilizzando un microcontroller PIC ed altri componenti economici in maniera semplice e con la tensione d'uscita variabile, il tutto semplicemente cambiando un valore nel codice PIC in modo che sia ovviamente il più stabile possibile, dovendo alimentare un altro circuito che può o meno richiedere una tensione precisa oltre che stabile (ad esempio Arduino Yun richiede una tensione d'ingresso stabile a 5V). Switching!?! Indica un tipo di alimentatore il cui principio di funzionamento è quello di convertire un'onda quadra (uscita PWM del PIC) nel suo valore medio tramite un filtro passa basso. Retroazione digitale?!!? Come la stragrande maggioranza dei circuiti anche questo è retroazionato, la differenza è che viene prima convertito dall'ADC del PIC e poi confrontato guadagnando in flessibilità.
Introduzione
I principali componenti utilizzati in questo progetto sono i seguenti:
-dsPIC33FJ128MC802 (ho scelto questo per ragioni che saranno spiegate successivamente, i PIC della stessa famiglia vanno bene ma bisogna cambiare delle linee di codice)
-driver mosfet di potenza (ho scelto il TC4427A)
-un induttore da 68μH
-due condensatori (100 μF, 100 μF polarizzati)
-partitore resistivo 4:1 (dipende dalla tensione che andrà nel pin per la conversione analogica-digitale che dovrà essere al massimo di 3.3V)
-due alimentatori (uno da 3-3.6V per il PIC, o equivalentemente si può alimentare tramite usb dal pc, e uno da 12V, un altro alimentatore va benissimo a patto di cambiare il rapporto di partizione ed alcuni valori nel programma)
- una breadboard
La domanda che a questo punto sorge spontanea è perché proprio questi valori e perché questi componenti.
Nei paragrafi successivi sarà spiegato il motivo che è stato in funzione di quello a disposizione (TC4427A) e di quello che "offriva" il mercato (valori precisi di induttanza e capacità, questo per quanto riguarda il valore specifico, l'ordine di grandezza è stato scelto in base a vincoli che saranno chiari in seguito). Ho ritenuto inoltre necessaria l'introduzione ad alcuni concetti chiave.
Devo precisare che la tensione di 3.3V indicato (in questo caso e in seguito) è relativa all'alimentazione da me utilizzata, avendo per comodità alimentato con il cavo usb che alimenta a sua volta il PIC a 3.3V, i valori massimi dipenderanno dall'alimentazione utilizzata che deve appartenere ad un range di tensioni (tutto specificato nel datasheet), quindi quando scriverò 3.3V mi riferirò per comodità al mio caso perché i valori nel programma dipendono (tra le altre cose) anche dall'alimentazione.
Schema a blocchi
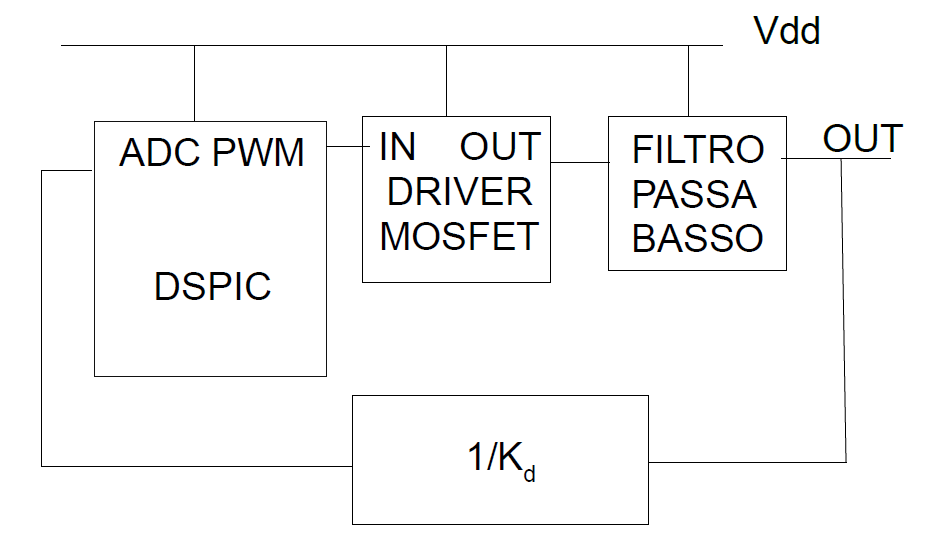
Figura 1: Schema a blocchi del circuito
Lo schema a blocchi è visualizzato in figura 1. Il filtro passa-basso è del secondo ordine ed è la serie induttore-condensatore con l'uscita prelevata ai capi del condensatore.
Il driver mosfet è stato inserito per poter pilotare capacità che il PIC non riuscirebbe a controllare, un semplice partitore resistivo è stato invece aggiunto per permettere al segnale d'uscita di rientrare nella dinamica dell'ADC (che è al massimo 3.3V).
Alimentatori switching
Una introduzione con gli alimentatori switching (Figura 2) ci condurrà verso i motivi di design e il loro principio di funzionamento confrontandolo con un alimentatore serie-parallelo (figura 2), la cui tensione d'uscita è data dal partitore R3, R4.
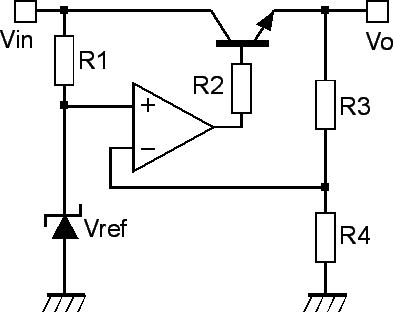
Figura 2: Alimentatore serie-parallelo
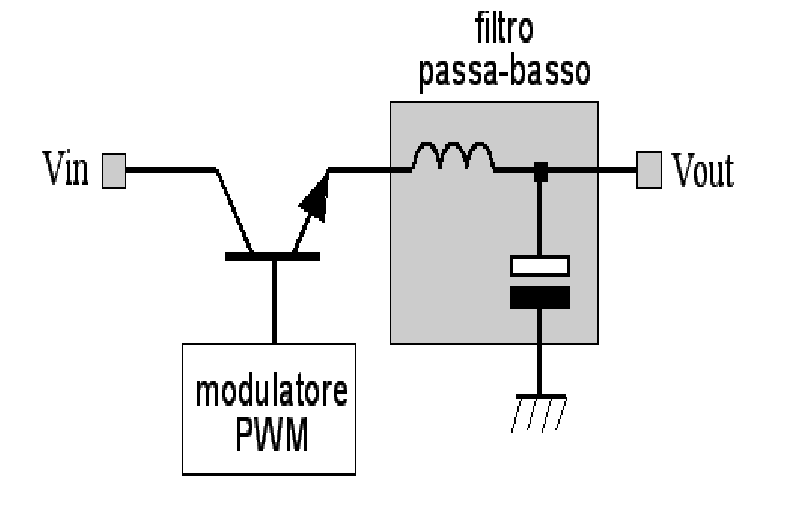
Figura 3: Alimentatore switching (circuito base)
Ci sono vari parametri che in un alimentatore devono essere controllati, uno fra questi è il rendimento. Questo parametro è importante non solo perché indica quanta potenza viene sprecata, ma anche perché indica quanta ne dissipa il dispositivo, ossia la differenza tra la tensione di ingresso e la tensione di uscita per la corrente che scorre, Pdiss=(Vin-Vout)*Iout: sappiamo infatti che, sempre per il principio della conservazione, la potenza che non troviamo in uscita è stata dissipata dal dispositivo. Questa ragione ha portato alla ricerca di un nuovo tipo di alimentatore che migliorasse questo parametro. L'alimentatore switching risponde a questa richiesta. Questo tipo di alimentatore si basa sui seguenti concetti: il funzionamento dei transistor in commutazione; una tensione in ingresso che è un'onda quadra con un duty cycle variabile (a seconda della tensione in uscita desiderata) in modo da non avere il transistor continuamente in funzione (riducendo anche qui la potenza), e l'utilizzo di un filtro passa basso del secondo ordine che ha in ingresso il PWM che assume 0 V oppure A V (con A l'ampiezza dell'onda quadra) e ha una frequenza che è molto maggiore (almeno un ordine di grandezza superiore) della frequenza di taglio del filtro: il filtro in questo modo riceve in ingresso un'onda quadra che possiamo rappresentarla in serie di Fourier, cioè avrà una componente a frequenza zero più infinite armoniche, la prima avrà la frequenza del PWM mentre le altre saranno multiple di tale frequenza dato che il PWM funziona ad una frequenza molto maggiore del filtro, quest'ultimo attenua moltissimo la componente alternata lasciando quasi esclusivamente la continua (sottolineo quasi, ci saranno in uscita dei residui alla frequenza del PWM), la tensione di uscita risulta quindi essere: [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 5988 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Una particolarita’ del progetto e’ il sistema pid. Con simulink per esempio e’ possibile valutare attentamente i coefficienti per migliorare i parametri di design.