
Il radar Automotive di Freescale è stato presentato all’Electronica Show di Monaco di Baviera e allo stesso tempo ne è stato annunciato il rilascio per le applicazioni di sicurezza nell’industria automobilistica. Questo va ad espandere il brand Xtrinsic Sensing per includere anche le questioni relative alla sicurezza stradale, come il controllo della velocità di crociera adattivo, l’individuazione di un angolo cieco e la possibilità di evitare l’impatto laterale.
Automotive Radar di Freescale e la sicurezza attiva (Active Safety)
Come si vede dalla figura i chipset sono ripartiti in dispostivi RF separati per la trasmissione e la ricezione, permettendo ad un sistema di avere più modalità operative. Il radar a lungo raggio copre distanze fino a 250 metri e i veicoli arrivano fino a velocità di 250 Km/h. Esso utilizza una banda di frequenza stretta e un raggio stretto con una risoluzione spaziale nell’ordine del mezzo metro. Questa è la modalità che abilita il cruise control adattivo. In alternativa, gli stessi dispositivi possono essere riconfigurati (al volo) per un radar a corto raggio per identificare degli oggetti nelle immediate vicinanze di un veicolo. In questo esempio sono stati utilizzati una frequenza ed un raggio più larghi per identificare oggetti fino a 30 metri di distanza. In questa modalità sono supportate velocità (dei veicoli) fino a 150 KM/h.
-
- Basso consumo di energia
- Rumore di fase estremamente basso
- Alta precisione nel controllo della frequenza (+/- 110ppm)
- Supporto per design RX con oscillatore locale alla metà della frequenza RF (38.25 GHz)
- Capacità di integrazione monolitica della stabilizzazione della frequenza (PLL) e della modulazione FMCW
- Interfaccia SPI
-
- Supporto del multicanale
- Oscillatore locale a 38.25 GHz
- IF Single-ended o differenziale
- Basso rumore
- Protezione ESD (RF e DC)
- Interfaccia SPI opzionale
L’acronimo FMCW (Frequency Modulated Continuous Wave) indica le trasmissioni radar con un’ampiezza di segnale costante che cambia di frequenza in modo lineare. Il raggio trasmesso rimbalza su oggetti distanti e ritorno al ricevitore alcuni istanti dopo. Il lasso di tempo fra la trasmissione e la ricezione assicura che il trasmettitore e il ricevitore stiano operando a due diverse frequenze, con il risultato che la differenza di frequenza è direttamente proporzionale alla distanza dell’obiettivo. Il vantaggio degli FMCW consiste nella facilità di calcolo della velocità e del range, che tra l’altro è anche molto accurato.
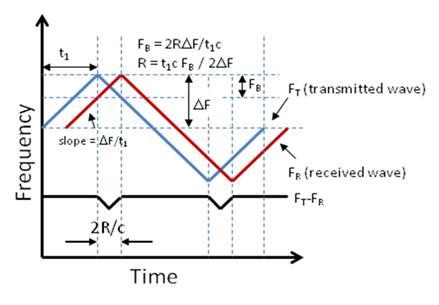
Radar Automotive di Freescale: forme d’onda FMCW per obiettivi statici
La figura sopra mostra sia le forme d’onda trasmesse (blu) che quelle ricevute (rosse) per un radar FMCW con un trasmettitore e un obiettivo statici. Il tempo di propagazione tra le due forme d’onda è 2R/c, dove R rappresenta il range fra il trasmettitore e l’oggetto che è stato individuato, e c rappresenta la velocità della luce.
FB è la differenza in frequenza tra i segnali trasmessi e quelli ricevuti. Dalla figura si evince che questa è uguale a 2RΔF/t1c. Ricalcolando, otteniamo la distanza dal trasmettitore al target R= t1cFB/2ΔF. Le cose si fanno più interessanti quando l’obiettivo è in movimento.
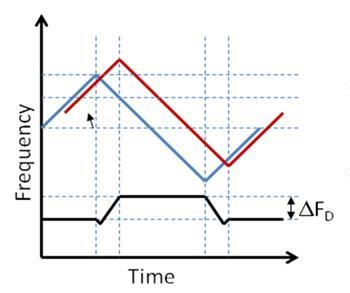
Radar Automotive di Freescale: forme d’onda FMCW per obiettivi e trasmettitori in movimento
L’effetto Doppler è responsabile per il cambio di frequenza osservato nella forma d’onda ricevuta. Si ricorda che il cambio Doppler nella frequenza è Δf = -v/l0 dove v= velocità dell’obiettivo relativa al trasmettitore e l0 è la lunghezza d’onda dell’onda trasmessa. Quindi, misurando ΔFD in Figura 3 si ottengono le informazioni necessarie per determinare quanto veloce un veicolo stia per approcciarne un altro.
