FSLBOT è il nuovo robot Freescale, uno strumento pratico per formare giovani innovatori di tutte le età nel campo della meccatronica. La meccatronica è la scienza che propone l’interazione tra informatica, elettronica e meccanica per semplificare il lavoro umano e include la progettazione di sistemi con sensori ed attuatori.
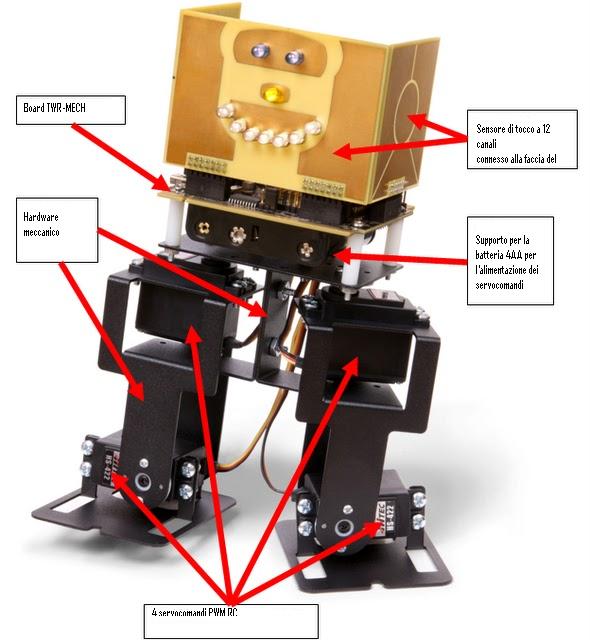
Il robot Freescale può essere programmato per camminare avanti, indietro, girare a destra o a sinistra e stare in equilibrio su una sola gamba, grazie a quattro servocomandi utilizzati come attuatori. Alla base un processore ColdFire a 32 bit con 512K di memoria flash e 64K di memoria RAM. Inoltre TSLBOT è dotato di un sensore al tatto a dodici canali integrato e di due prese per l’espansione del sensore. Gli utenti possono infatti inserire diversi tipi di moduli di sensore,inclusi gli accelerometri a tre assi, i sensori di pressione ed i magnetometri.
Robot Freescale: l’hardware di FSLBOT
Il cuore del FSLBOT è TWR-MECH, la board Tower Mechatronics, che contiene tutti i sensori elettronici per il robot.

La board TWR-MECH è in dotazione con il kit del robot Freescale o si può acquistare separatamente, sempre da Freescale. Monta una batteria AA come alimentazione e ha il supporto per un’alimentazione esterna da 7.2 volt; supporta inoltre fino ad otto servocomandi remoti PWM. La board TRW-MECH è un modulo di controllo compatibile con la maggior parte dei moduli periferici Freescale.
L’ingrediente segreto del Robot Freescale: il software
L’hardware di FSLBOT è un blocco di plastica, metallo e sabbia senza software. Sia FSLBOT che la board TWR-MECH sono supportati da tre livelli di software.
Il primo livello è per principianti, o per coloro che non scrivono software per mestiere. Nello specifico, in un ambiente di addestramento, il primo livello è pensato per permettere a tutti di essere rapidamente funzionali. L’ambiente di programmazione è chiamato Robot Vision Toolkit (www.EMGRobotics.com) e si basa su Robotsee, un linguaggio di programmazione semplice come BASIC, ma con la potenza di C. E’ stato progettato per essere facile da apprendere, in modo che gli apprendisti possano concentrarsi sul materiale piuttosto che sul linguaggio di programmazione. Sia il toolkit Robot Vision che RobotSee sono progetti open source di Eric Gregori della EMGRobotics.
Date un'occhiata qui per vedere diverse dimostrazioni di RobotSee e di Robot Vision
Il secondo livello di supporto software per FSLBOT e la board TWR_MECH si basa sul linguaggio di programmazione C e sulla suite di tool di Freescale Code Warrior. La board TWR-MECH contiene un debugger hardware integrato che rende il debugging e la programmazione in C facile e libera. Code Warrior Special Edition di Freescale è invece una versione limitata (massimo 128K e non supporta C++), a costo zero, della suite professionale di Code Warrior. Viene altresì offerto un compilatore C professionale con un IDE Eclipse-based ed un debugger. Il frame work C fornisce i driver per tutte le feature di TWR-MECH, insieme ad esempi di codice per far camminare il robot.
Il terzo livello di supporto software è una porta di MQX per la board TWR-MECH e FSLBOT. MQX è un sistema operativo Real-time robusto, ottimizzato per la famiglia ColdFire e la porta MQX include uno stack USB per il supporto del dispositivo hardware USB sulla board TWR-MECH e uno stack Ethernet che richiede il modulo opzionale Tower Communciation. Gli stack di comunicazione di MQX danno accesso totale a tutti gli aspetti della board TWR-MECH. Il robot Freescale, FSLBOT può essere upgradato, per diventare una macchina davvero intelligente, usando i.MX53 Quick Start Board, un computer Linux embedded da 3 pollici per 3 con 1GB di RAM e clock a 1GHz. La Quick Start Board gira su una sorgente pubblica gratuita Linux BSP di Freescale, o su una sorgente (sempre pubblica) Android di Adeneo. Con la sua implementazione, il robot può essere programmato in ogni linguaggio supportato da Linux embedded come Python, Perl, Bash.
Conclusioni: abilitare la robotica
La board TWR-MECH può essere utilizzata al di fuori del robot Freescale per creare prototipi per progetti che richiedano sensori, microcontrollori e attuatori. La programmazione, sia di FSLBOT che della board TWR-MECH è supportata a tutti i livelli, dal principiante all’avanzato e per incrementare l’utilità del robot è possibile aggiungere un nuovo ‘cervello’ sotto la forma di un computer Linux basato su i.MX53. FSLBOT si può ordinare direttamente dal sito di Freescale, stesso discorso se si opta per la board TWR-MECH separatamente.

