Sul sito Elettronica Open Source, ho già presentato alcuni modelli di robot comandati in remoto, come LittleBot che è comandato tramite Bluetooth , o un altro modello che era comandato tramite un telecomando ad infrarossi
L’opportunità data dal contest 20 Arduino Motor Shield di Infineon gratis per voi, ha portato all’idea di realizzare un nuovo modello di rover comandato in remoto utilizzando il sistema Wi-Fi. Per il controllo si è utilizzata una scheda Arduino Yún che è la combinazione di un classico Arduino Leonardo (basato sul processore ATMEGA32U4) con un sistema-one-chip Wi-Fi in cui viene eseguito Linino (un MIPS GNU / Linux basata su OpenWRT). Altre particolarità sono date dal fatto che sulla scheda sono presenti alcuni connettori tra i quali una porta USB Host a cui è possibile collegare una web camera, che gestita dalla sezione Linux, permette di trasmettere in streaming le immagini riprese attraverso la rete Wi-Fi.
Descrizione dei componenti base che formano il rover.
Cominciamo con la descrizione dei principali elementi che formano il Rover:
- Base robotica con telaio in alluminio e 2 motoriduttori;
- Scheda con controllo Arduino Yún;
- Motor shield di Infineon (ricevuto tramite il contest 20 Arduino motor shield di Infineon gratis per voi )
- Dispositivo Pan & Tilt per movimentazione webcam;
- Shield con circuito gestione motori, dispositivo Pan & Tilt, sensori;
- Scheda alimentazione;
- Webcam.
Queste sono solo alcune delle caratteristiche del robot RoboYún:
| Telaio | Il telaio in alluminio di tipo commerciale prodotto dalla DFRobot: Turtle - 2WD Mobile Platform |
| Scheda di comando | Scheda Arduino Yún, consigliato l’uso di una memoria SD esterna per ospitare i propri files |
| Modulo comando motori | DC Motor Control Shield with BTN8982TA for Arduino |
| Shield controllo | Comando relè per inversione senso di rotazione motore Comando fari a led per illuminazione frontale Uscite per azionamento servo Pan & Tilt |
| Sensore | Temperatura/umidità – Sensore DHT11 |
| Webcam | Webcam modello C170 della Logiteh - Altezza 60.5 mm, Larghezza 70.3 mm, Profondità 71 mm, Peso 75 g |
| Dispositivo Pan & Tilt | Dispositivo Pan & Tilt SparkFun codice ROB-10335 |
| Alimentazione | 5 batterie tipo AA per una tensione di 7,5V Modulo di tipo Step-Down basato sul circuito integrato LM2596S, per l’uscita di 5V alimentazione parte elettronica. |
| Motoriduttori | In plastica con rapporto riduzione 1:120, alimentazione 7,5V, assorbimento 170 mA |
| Ruote | Ruote di plastica e gomma, Diametro esterno: 65mm, Larghezza ruota: 26 millimetri, Hub: 6mm |
| Misure robot | Diametro 170 mm altezza massima 170 mm |
| Peso robot | 750 g, compreso batterie |
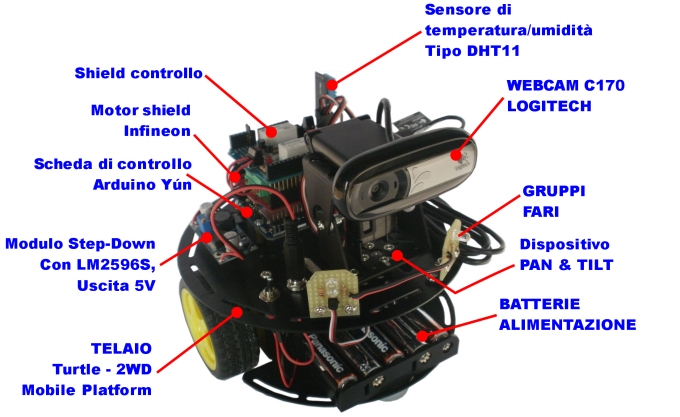
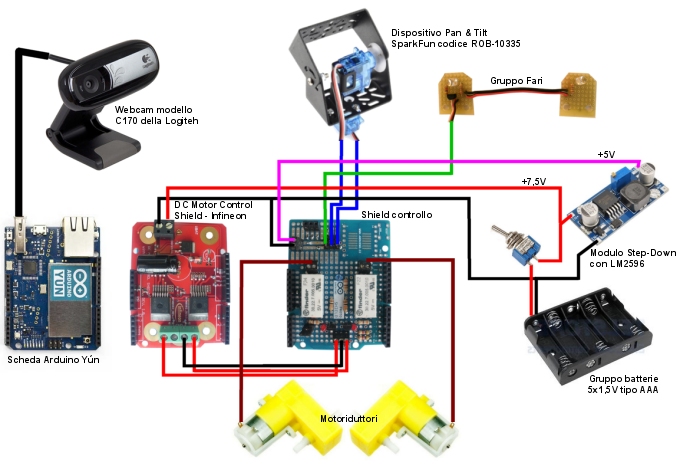
Posizione delle varie parti che costituiscono il robot
Passiamo ora a una breve descrizione dei singoli componenti:
Base robotica
Il telaio utilizzato per la realizzazione del Rover è prodotto dalla DFRobots e il suo nome commerciale è Turtle - 2WD Mobile Platform, si tratta di un kit costituito da un corpo in alluminio, due motoriduttori, due ruote Tamiya racing (diametro 65 mm), un ballcaster in metallo, un portabatteria, un deviatore, una presa di alimentazione, le viti e i dadi.

Il montaggio è molto semplice, è sufficiente seguire le indicazioni riportate sul manuale cartaceo (o in versione pdf) presente all'interno della confezione.
Motoriduttori
All'interno del kit della base robotica sono presenti due motoriduttori (SKU: FIT0016) con motore a corrente continua con un’uscita di 160 rpm se alimentati a 6V.

Caratteristiche Elettriche:
- Tensione di funzionamento: 3 ~ 7.5V (6V nominale);
- Max. A vuoto Corrente (3V): 140 mA (3V) - 170 mA (6V);
- Velocità a vuoto (3V): 90 rpm (3V) - 160 rpm (6V);
- Max. Coppia di uscita: 0.8 kgf.cm;
- Max. corrente di Stallo: 2,8 A.
Condizioni Operative:
- Carico stimato: 0,2 kgf.cm;
- Temperatura di funzionamento: -10 ~ + 60 ℃;
- Tipo motore: 130.
Caratteristiche meccaniche:
- Modalità uscita: 2 lati;
- Rapporto di trasmissione: 1:120;
- Max. Diametro Asse di uscita: 5,4 millimetri;
- Peso netto: 45 g
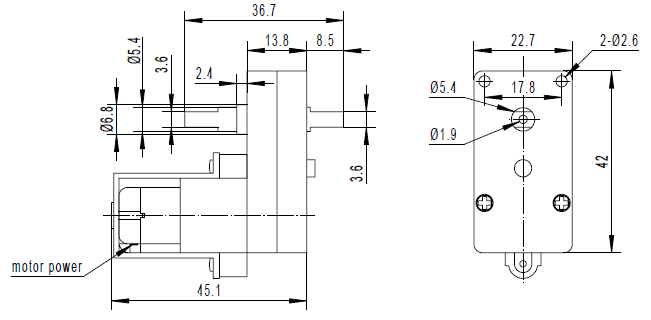
Dimensioni del motoriduttore utilizzato
NOTA: Per ridurre le interferenze con la circuiteria elettronica causate dallo scintillio dovuto allo sfregamento delle spazzole del motore elettrico sul collettore, è consigliabile saldare tre condensatori ceramici (o meglio multistrato) da 100nF uno tra positivo e carcassa, uno tra negativo e carcassa e uno tra positivo e negativo. Nella Figura è visibile lo schema di collegamento dei condensatori utilizzati come filtri antidisturbo.

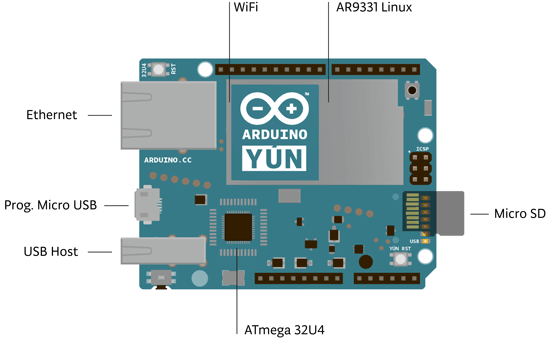
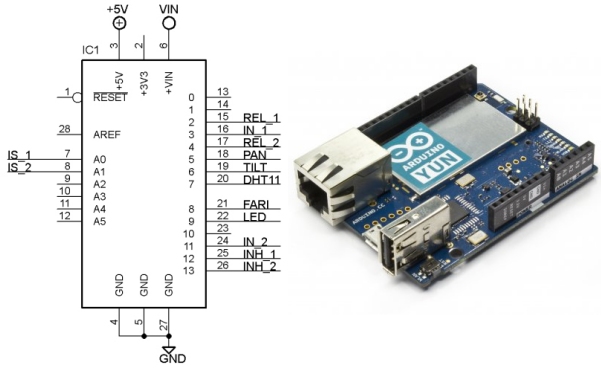
Scheda di controllo Arduino Yún
La scheda di controllo utilizzata è il modello Arduino Yún, in cui sono presenti due microcontrollori: il primo è un Atheros AR9331 che supporta una distribuzione Linux basata su OpenWRT chiamata Linino, il secondo è un ATmega32u4, lo stesso che utilizza la scheda Arduino Leonardo o la scheda Arduino Esplora. La scheda offre così un potente computer connesso con il microcontrollore di Arduino, è dotata di connettore per rete Ethernet, Wi-Fi, slot MicroSD e di 20 pin di I/O, dei quali 7 PWM e 12 ingressi analogici, le sue dimensioni sono 73x53mm per un peso di 32g.
Caratteristiche del microcontroller AVR Arduino
| Microcontroller: | ATMEGA32U4 |
| Tensione di funzionamento: | 5V |
| Tensione in ingresso: | 5V |
| Pin di I/O Digitale: | 20 |
| Canali PWM: | 7 |
| Canali di ingresso analogici | 12 |
| Corrente per Pin I/O: | 40 mA |
| Corrente sul Pin 3.3V: | 50 mA |
| Flash Memory: | 32 KB (di cui 4 KB utilizzato da bootloader) |
| SRAM: | 2.5 KB |
| EEPROM: | 1 KB |
| Velocità di clock: | 16 MHz |
Caratteristiche microprocessore Linux
| Processore: | Atheros AR9331 |
| Architettura: | MIPS @ 400MHz |
| Tensione di funzionamento: | 3.3V |
| Ethernet: | IEEE 802.3 10 / 100Mbit / s |
| WiFi: | IEEE 802.11b / g / n |
| USB tipo A: | Host USB 2.0 |
| Lettore di schede: | Micro-SD |
| RAM: | 64 MB DDR2 |
| Memoria flash: | 16 MB |
Alimentazione
L’alimentazione della scheda avviene attraverso la connessione micro-USB con una tensione di 5VDC. Se si vuole utilizzare il pin Vin, è necessario fornire una tensione di 5V DC stabilizzata, in quanto sulla scheda non è presente come nelle normali schede Arduino, l’apposito integrato regolatore. Fornire una tensione superiore può danneggiarla.
Memoria
Il processore ATMEGA32U4 ha 32 KB (con 4 KB per il bootloader). Ha anche 2.5 KB di SRAM e 1 KB di EEPROM (che può essere letta e scritta con la libreria EEPROM ).
La memoria dell’ AR9331 non è incorporata all'interno del processore. La RAM e la memoria di archiviazione sono collegate esternamente. Yún ha 64 MB di DDR2 RAM e 16 MB di memoria flash.
Pin di Ingresso e uscita
Si dispone in totale di 20 pin di input/output digitali, di cui 7 da utilizzare come output PWM e 12 come input analogici.
Ciascuno di questi pin può essere pilotato in maniera indipendente dal software.
Alcuni di questi pin hanno comportamenti specifici:
- I pin 0 (Rx) e 1 (Tx) possono essere utilizzati per la comunicazione seriale.
- I pin 0, 1, 2, 3 e 7 possono essere configurati come trigger per eventi esterni
- I pin 3, 5, 6, 9, 10, 11 e 13 possono essere configurati per generare segnali PWM con risoluzione di 8 bit
- I pin A0-A5 e A6-A11 (sui pin digitali 4, 6, 8, 9, 10 e 12) sono gli ingressi analogici. Ognuno di questi pin può essere utilizzato come I/O digitale. Ogni ingresso analogico fornisce 10 bit di risoluzione (cioè 1024 valori differenti). Di default, gli ingressi analogici hanno un range che va da massa a 5V, anche se è possibile cambiare l'estremità superiore con il pin AREF.
Bridge
Come abbiamo visto Arduino Yún integra il microcontrollore ATmega32u4 e l'Atheros AR9331 in cui "gira" Linino, una distribuzione di Linux. Il "Bridge" è una libreria che mette in comunicazione questi due componenti.
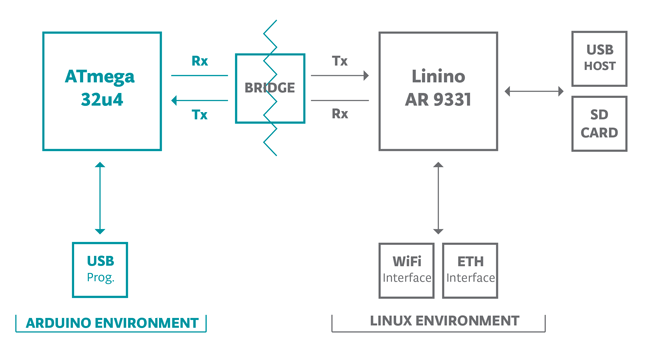
Dalla figura si nota come la microSD, l'interfaccia Wi-Fi ed Ethernet non siano direttamente connesse al microcontrollore ATmega; quest'ultimo ha accesso tramite il microprocessore AR 9331. Il Bridge consente quindi ad Arduino di interfacciarsi con queste periferiche.
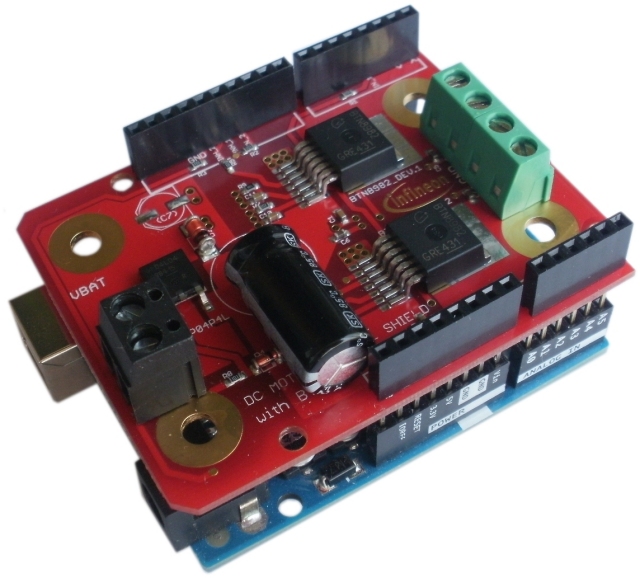
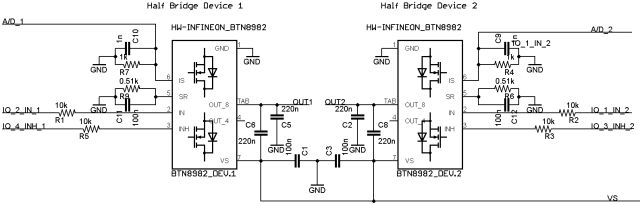
Motor shield della Infineon
Il controllo dei motori è realizzato tramite il motor Shield della Infineon che permette di controllare, tramite alcune porte I/O di Arduino, un motore DC nei due sensi di marcia, oppure due motori DC nello stesso di marcia.
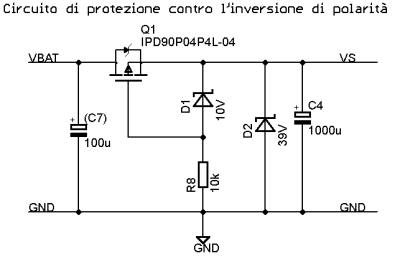
Lo schema della scheda è molto semplice, essendo formato da un circuito per la protezione contro l’inversione di polarità e da due circuiti ponte circondati da pochissimi altri componenti passivi.
Circuito per la protezione contro l’inversione di polarità
Il circuito di protezione contro l’inversione della polarità è formato dal mosfet Q1 tipo IPD90P04P4L, prodotto dalla stessa Infineon, questi è un mosfet di potenza canale P, la qui polarizzazione è realizzata dalla resistenza R8 e dallo zener D1, mentre la tensione di alimentazione è limitata nel suo valore massimo tramite lo zener D2 da 39 V, il condensatore elettrolitico C4 da 1000µF è necessario per mantenere basso il ripple della tensione VS durante la commutazione.
Circuito di potenza
Il cuore della scheda è rappresentato da due integrati tipo BTN8982TA: si tratta di un integrato semiponte H, il circuito interno è formato da un MOSFET canale P e uno a canale N più il relativo circuito driver.
Il circuito è facile da controllare, poiché è sufficiente applicare segnali di livello logico al pin IN e INH.
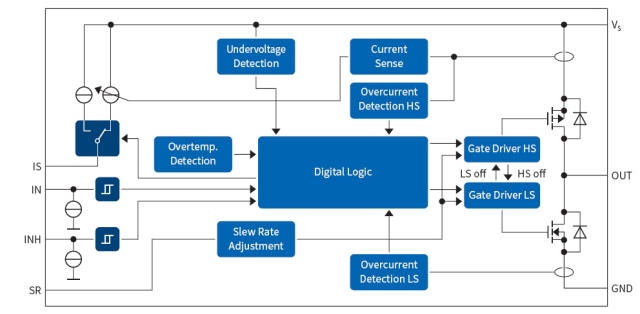
Quando si applica un segnale PWM (acronimo inglese di Pulse-Width Modulation o modulazione di larghezza di impulso) al pin IN, la corrente fornita al motore, può essere controllata tramite il duty cycle del PWM.
Con un resistore collegato esternamente tra il pin SR e GND è possibile regolare la velocità di risposta, o slew rate.
Le principali caratteristiche dell’integrato sono:
- Tensione d’ingresso nominale 8-18 V (max. 6 - 40 V);
- Possibilità di controllo motori Brushed DC fino a 250 W con carico continuo
- Unità per il controllo sia di un motore DC bidirezionale con spazzole o di due motori a corrente continua unidirezionali;
- Corrente media pari a 30 A (BTN8982 ha una limitazione in corrente @55 A), il limite è dato dalla dissipazione del PCB;
- Alta frequenza PWM, per esempio 30 kHz;
- Slew Rate modificabile per EMI ottimizzato tramite resistori esterni;
- Circuito del driver con ingressi a livello logico;
- Protezione da sovraccarichi o temperature eccessive;
- Diagnosi con current sense, protezione da sovratemperatura e sovracorrente;
- Lo shield presenta già i collegamenti con i pin di controllo.
Modifiche effettuate sullo shield originale.
Allo shield originale sono state apportate alcune modifiche per adattarlo al progetto.
Inserimento morsettiere a vite: la scheda in origine prevede l’utilizzo di boccole per spinotto a banana con diametro 4 mm, si è invece preferito inserire le più comode morsettiere a vite. Per questo motivo si è dovuto forare il circuito ed effettuare qualche saldatura.
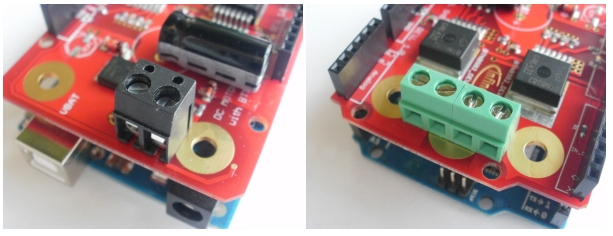
Modifica orientamento condensatore: il condensatore di livellamento C4 che era montato in verticale, per ridurre l’ingombro è stato montato orizzontalmente.
Isolamento pin alimentazione: esiste la possibilità che il pad dell’alimentazione vada a contatto con la presa usb (nel caso della scheda Arduino UNO) o con la presa ethernet (nel caso della scheda Arduino Yún) per questo motivo la scheda è stata isolata con del nastro adesivo.

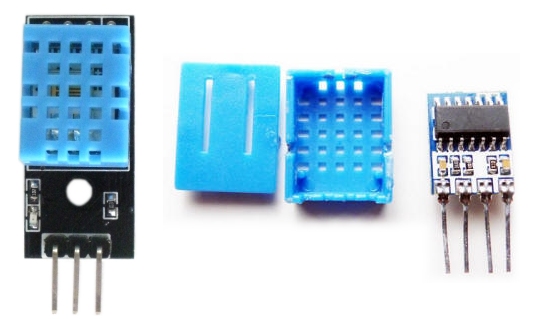
Sensore di temperatura e umidità
Il sensore di temperatura e umidità e il modello DHT11 che è un sensore con uscita dati in formato digitale. I suoi elementi sensibili sono connessi ad un processore 8-bit single-chip.
Ogni sensore è compensato in temperatura e calibrato in un'apposita camera di calibrazione che determina in modo preciso il coefficiente che viene poi salvato all'interno della memoria OTP.
| Modello | DHT11 |
| Alimentazione | 3-5.5V DC |
| Segnale di uscita | digitale tramite single-bus |
| Elemento sensibile | resistenza in Polimero |
| Campo di misura umidità | 20-90% di umidità relativa, temperatura di 0-50 gradi Celsius |
| Precisione | umidità ±4% RH (Max ±5% di umidità relativa), temperatura ±2.0 Celsius |
| Risoluzione o la sensibilità | umidità 1% di umidità relativa, temperatura 0.1 Celsius |
| Ripetibilità umidità | ±1% di umidità relativa temperatura ±1 Celsius |
| Umidità isteresi | ±1% RH |
| Stabilità a lungo termine | ±0.5% UR / anno |
| Tempo di rilevazione medio: | 2s |
| Dimensioni | 12x 15,5 x5,5 millimetri |
Il modello utilizzato venduto da Banggood è già montato su una basetta, insieme alla resistenza tra il pin di alimentazione e il pin dati, è inoltre presente un led che segnala la presenza dell’alimentazione. Il sensore è montato sullo speciale shield previsto sul robot ed è connesso al pin D7; per la sua gestione si utilizza una speciale libreria DHT.h.
Dispositivo PAN & TILT
Il dispositivo Pan & Tilt è analogo a quello già mostrato nell’articolo Gestione di un dispositivo Pan & Tilt con la scheda Arduino Esplora, questo è venduto dalla SparkFun codice ROB-10335.
Nel kit sono presenti i componenti meccanici cioè due staffe e tutto l’hardware necessario per il fissaggio, i servomotori devono essere presi a parte, quelli consigliati sono dei servo compatibili con il modello Hitec HS-55 codice Sparkfun ROB-09065 le cui caratteristiche sono:
- Tensione: 4,8-6,0 V;
- Coppia: 1,6/ 2 Kg/cm. (4.8 / 6.0V);
- Velocità: 0.15 / 0.10 sec / 60 ° (4,8 / 6.0V);
- Rotazione: ~ 160 °;
- Ingranaggi in Nylon;
- 3-Pole ferrite motore;
- Dimensioni: 31,8 x 11,7 x 29 mm;
- Filo Lunghezza: 160 mm;
- Peso: 9g.

I due servo sono collegati allo speciale shield realizzato per il robot e risultano collegati alle porte D5 (servo Pan) e D6 (servo Tilt).
Per la gestione è utilizzata la libreria servo.h.
WebCam
RoboYún è dotato di una webcam, la scelta del modello, è fatta anche in funzione della possibilità di essere riconosciuta dalla sistema operativo della scheda Arduino Yún, quindi si è scelto il modello C170 della Logiteh.

Questa WebCam è un modello poco costoso dalle buone caratteristiche, che sono:
- Acquisizione video: Fino a 1024 x 768 pixel;
- Tecnologia Logitech Fluid Crystal;
- Foto: Fino a 5 megapixel (con interpolazione software);
- Microfono incorporato con funzionalità di riduzione del rumore;
- Certificazione Hi-Speed USB 2.0;
- Clip universale per laptop e monitor LCD o CRT.
Shield con circuito gestione motori, dispositivo Pan & Tilt, sensori
Come abbiamo visto il motor Shield della Infineon, presenta un solo ponte H, per cui può gestire un solo motore DC nei due sensi di marcia, oppure due motori DC nello stesso senso di marcia.
Per questo motivo nell'azionamento dei motori sono utilizzati dei motor shield con intergrati tipo L293, SN754410, L298, che hanno al loro interno 4 ponti H, il che permette di gestire due motori nei due sensi di marcia.
Per aggirare il problema si è realizzato un apposito shield (Schema formato pdf) su cui sono montati due relè a doppio contatto, che permettono di invertire il senso di rotazione dei motori, indipendentemente dal senso dato dal modulo Infineon, che in questo caso viene utilizzato solo come regolatore della velocità di rotazione tramite la gestione PWM.
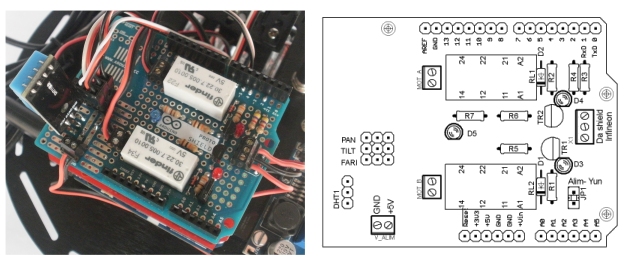
Il segnale proveniente dallo shield Infineon è applicato alla morsettiera X1, dove arriva ai due relè a doppio scambio controllati tramite i due transistor TR1 e TR2 (tipo BC547) pilotati dalle porte D2 e D4.
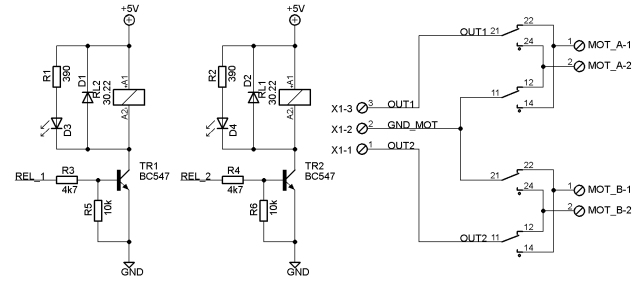
Dettaglio della sezione gestione dei relè controllo rotazione motori.
L’attivazione dei relè è segnalato anche tramite i due Led D3 e D4, nel circuito sono poi presenti i diodi D1 e D2 che hanno il compito di scaricare rapidamente tutta l'energia accumulata nella bobina mantenendo la tensione inversa a valori accettabili e non dannosi per gli altri componenti.
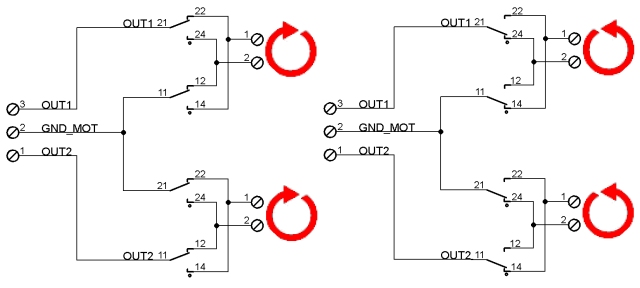
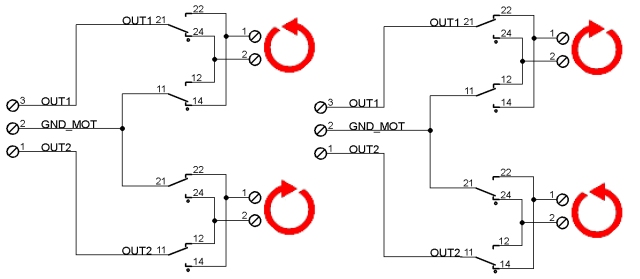
Schema di attivazione relè e rotazione motori
Sulla scheda sono inoltre presenti i connettori per il collegamento dei due servo del dispositivo di orientamento della webcam, il connettore per il sensore di temperatura/umidità e uno per il pilotaggio del circuito dei fari.
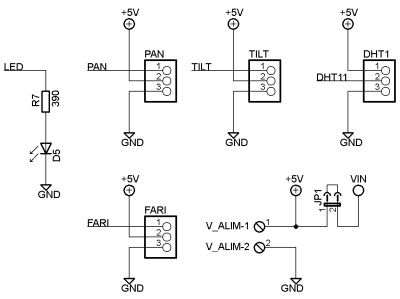
Sullo shield è poi montato un led di colore blu D5 controllato dalla porta D9 che è utilizzato per segnalare quando il robot è pronto ad accettare i comandi.
L’alimentazione +5V proveniente dal modulo regolatore è fornita alla morsettiera V_ALIM, dove tramite il ponticello JP1, viene trasferita al pin VIN per alimentare la scheda Arduino Yún. La funzione dei pin ingresso/uscita è riassunta in questa tabella:
| Pin | IN/OUT | Funzione |
| D2 | OUT | Comando Relè 1 |
| D3 | OUT | IN_1 (Infineon) |
| D4 | OUT | Comando Relè 2 |
| D5 | OUT | Comando Servo TILT |
| D6 | OUT | Comando Servo PAN |
| D7 | IN | Sensore DHT11 |
| D8 | OUT | Gestione Faro |
| D9 | OUT | Led blu |
| D11 | OUT | IN_2 (Infineon) |
| D12 | OUT | INH_1 (Infineon) |
| D13 | OUT | INH_2 (Infineon) |
| A0 | IN | IS_1 (Infineon) |
| A1 | IN | IS_2 (Infineon) |
L’elenco dei componenti per la sua costruzione è:
| Sigla | Componente |
| D1, D2 | Diodo 1N4148 |
| D3, D4 | Diodo led ø 3mm Rosso |
| D5 | Diodo led ø 3mm Blu |
| R1,R2, R7 | Resistenza 390 Ω ¼ W |
| R3,R4 | Resistenza 4,7 kΩ ¼ W |
| R5, R6 | Resistenza 10 kΩ ¼ W |
| RL1, RL2 | Relè FINDER tipo 30.22.7.005.0010, 5VDC |
| TR1, TR2 | Transistor tipo BC547 |
| X1 | Morsettiera 3 poli passo 2,5 mm |
| MOT_A, MOT_B, V_ALIM | Morsettiera 2 poli passo 2,5 mm |
| FARI, PAN, TILT | Pinhead 3 poli maschio |
| DHT1 | Pinhead 3 poli femmina |
| JP1 | Pinhead 2 poli mascho con jumper |
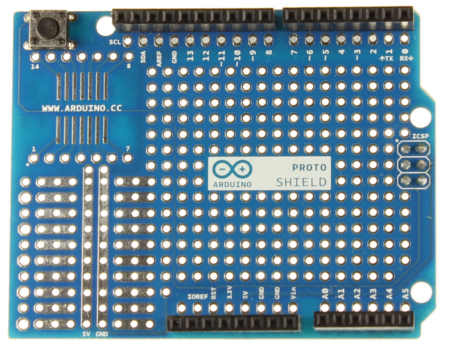
I componenti sono montati su una scheda prototipo tipo Proto shield R3.
Circuito fari
Per l’illuminazione della zona sorvegliata dal robot si utilizzano due led bianchi ad alta luminosità, montati su due piccoli circuiti stampati fissati al telaio. Per il pilotaggio dei led si è utilizzato un transistor in modo da non sovraccaricare la porta di Arduino.
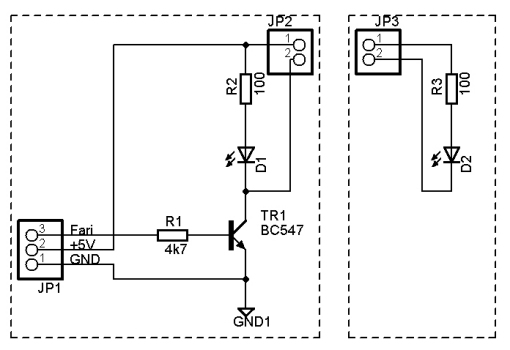

L’elenco dei componenti:
| Sigla | Componente |
| D1, D2 | Diodo led bianco ad alta luminosità ø 5mm |
| R1 | Resistenza 4,7 kΩ ¼ W |
| R2,R3 | Resistenza 100 Ω ¼ W |
| TR1 | Transistor tipo BC547 |
| JP1 | Pinhead 3 poli maschio |
| JP2, JP3 | Pinhead 2 poli maschio |
Alimentazione del robot
L’alimentazione del robot è fornita dal pacco batteria composto da 5 batterie da 1,5V per un totale di 7,5V.

Il modulo utilizzato per la regolazione della tensione di alimentazione è basato sul circuito integrato LM2596S: questa serie di regolatori monolitici fornisce tutte le funzioni attive, per realizzare un regolatore di commutazione di tipo Step-Down (buck), in grado di erogare sino a 3A con ottima regolazione del carico.
Questi dispositivi sono disponibili sia con tensioni fisse di uscita 3.3V, 5V, 12V oppure nella versione con uscita regolabile.
Per realizzare il circuito è richiesto un numero minimo di componenti esterni, questi regolatori sono semplici da usare avendo un circuito interno di compensazione della frequenza e un oscillatore a frequenza fissa.
La serie LM2596 opera a una frequenza di commutazione di 150 kHz permettendo l’uso di componenti del filtro di dimensioni più piccole di quanto sarebbe necessario con regolatori a commutazione operanti a frequenza inferiore.
Altre caratteristiche includono una tolleranza del ± 4% sulla tensione di uscita e ± 15% della frequenza dell’oscillatore.
E’ possibile la funzione di Shutdown esterno, con una corrente di standby di circa 80 μA.
Sono inoltre presenti funzioni di protezione che includono un limitatore della corrente d’uscita e l'arresto in caso si surriscaldamento o di guasto.

Nel nostro caso è stato utilizzato un piccolo modulo commerciale dalle ridotte dimensioni (con uscita regolabile tramite un trimmer multigiro) le cui caratteristiche sono:
- Tensione di ingresso: da 3 V a 40 V;
- Tensione di uscita regolabile: da 1,5 V a 35 V (la tensione d’uscita deve essere almeno 1,5V più elevata dell’ingresso);
- Corrente massima: 3 A;
- Dimensioni: 48,35 x 23,35 x 14 mm.
Montaggio del robot
Le operazioni di montaggio sono molto semplici poiché il telaio è già dotato di tutte le forature necessarie.
Le schede Arduino Yún, il motor Shield della Infineon e lo sheld di gestione si montano una sull'altra, un po’ di manualità sarà necessaria per effettuare i vari cablaggi, come visibile nello schema sotto riportato.
Programmi di gestione.
Per la gestione del robot tramite la rete Wi-FI è previsto l’utilizzo di un’interfaccia che potrà essere caricata su un PC o su un Tablet.
L’interfaccia è al momento in via di completamento: è composta da una normale pagina web che viene caricata all’interno della memoria della scheda Arduino Yún.
Questa pagina potrà essere richiamata direttamente tramite l’indirizzo della scheda se questa è collegata senza access point ip di default tramite:
http://192.168.240.1/sd/robot/ index.html
oppure se la scheda è connessa con access point con il comando
http://arduino.local/sd/robot/ index.html
Il video stream potrà essere visto all’indirizzo:
http://arduino.local:8080/stream.html
Il Pannello di controllo è formato da due frame in cui il quello superiore mostrerà le immagini riprese dalla webcam, mentre in quello inferiore è presente l’interfaccia di comando.

Per la gestione dei comandi è utilizzata una libreria javascript Open Source chiamata Zepto , questa è rilasciata con licenza MIT ed è largamente compatibile con jQuery e destinata ai browser moderni e in particolare a quelli dei dispositivi mobili e proprio per questo motivo è piccolissima (5-10 kb) anche rispetto a jQuery.
Zepto utilizza le stesse API di jQuery in modo che gli sviluppatori possano utilizzarla senza dover imparare nuove istruzioni, per questo motivo insieme alle pagine HTML sarà necessario inserire anche il file: “zepto.min.js”.
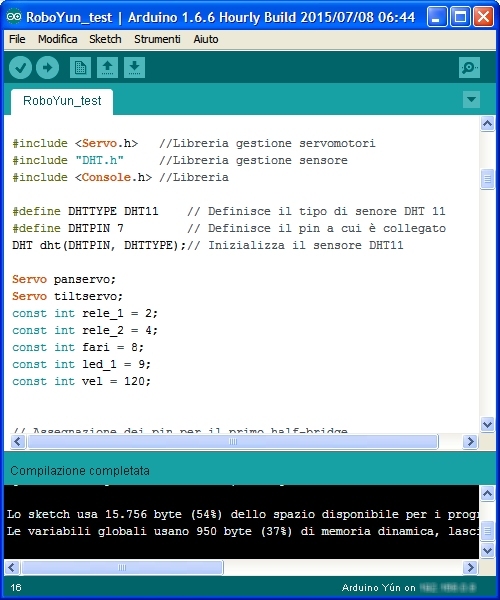
Il listato del programma di gestione sarà inserito in un futuro articolo, in questa fase si procederà solamente a testare le varie parti e a collegare e installare i driver per la gestione della webcam. Per quanto riguarda la programmazione di Arduino Yún utilizzeremo il relativo IDE, che in questo momento è disponibile nella versione 1.6.6.
Una volta installato, basterà selezionare Arduino Yún dal menu Strumenti> Board.
Per i dettagli, vedere la pagina reference e tutorials .
L'ATmega32U4 su Arduino Yún è fornito con un bootloader che permette di caricare un nuovo codice senza l'uso di un programmatore hardware esterno. È anche possibile programmarlo direttamente utilizzando il collegamento Wi-Fi.
Programma di test
Per verificare il funzionamento del programma potremmo caricare RoboYun_test, che permette di testare tutte le varie parti.
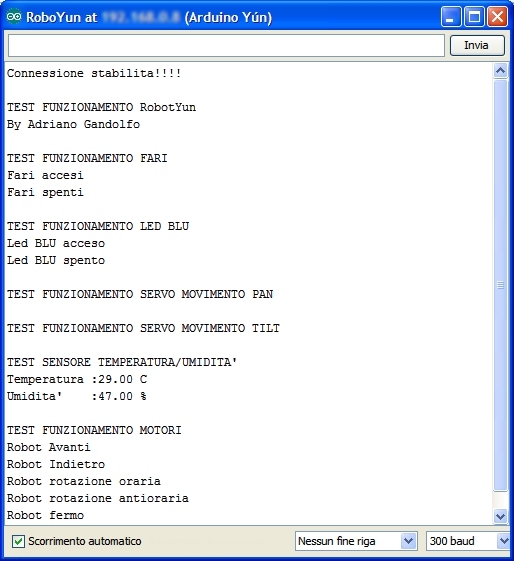
Le varie fasi dell'esecuzione del programma possono essere seguite tramite il collegamento WiFi, in quanto i messaggi del programma sono inviati al computer con il comando "console", questi utilizzando il bridge, che consente di inviare informazioni da Yún ad un computer proprio come si farebbe con il monitor seriale, ma in modalità wireless.
Il programma testerà in sequenza le varie parti del robot:
- Accensione Fari
- Accensione led blu
- Test servo Pan (effettuare il test senza la webcam)
- Test servo Tilt
- Test sensore temperatura/umidità
- Test motori
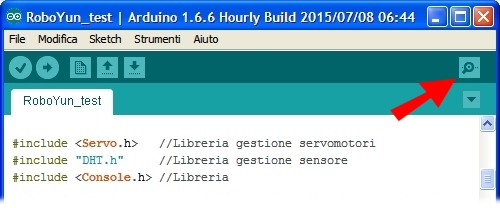
Una volta caricato il programma, si dovrà attivare il monitor seriale, che mostrerà le varie fasi di esecuzione del programma.
Listato del programma di test
#include <Servo.h> //Libreria gestione servomotori #include "DHT.h" //Libreria gestione sensore #include <Console.h> //Libreria #define DHTTYPE DHT11 // Definisce il tipo di senore DHT 11 #define DHTPIN 7 // Definisce il pin a cui è collegato DHT dht(DHTPIN, DHTTYPE);// Inizializza il sensore DHT11 Servo panservo; Servo tiltservo; const int rele_1 = 2; const int rele_2 = 4; const int fari = 8; const int led_1 = 9; const int vel = 120; // Assegnazione dei pin per il primo half-bridge const int IS_1 = A0; // current sense and diagnostics const int IN_1 = 3; // input (PWM) const int INH_1 = 12; // inhibit (low = sleep) // Assegnazione dei pin per il secondo half-bridge const int IS_2 = A1; // current sense and diagnostics const int IN_2 = 11; // input (PWM) const int INH_2 = 13; // inhibit (low = sleep) void setup() { // initializa la comunicazione seriael Bridge.begin(); Console.begin(); // Gestione servo tiltservo.attach (5); // Collega il servo Tilt alla porta D5 panservo.attach (6); //Collega il servo Pan alla porta D6 tiltservo.write(90); //tilt servo al centro panservo.write(90); // panservo al centro // Gestione relè pinMode(rele_1, OUTPUT); digitalWrite(rele_1, LOW); pinMode(rele_2, OUTPUT); digitalWrite(rele_2, LOW); // Impostazione stato input/output dei pin pinMode(IS_1, INPUT); pinMode(IN_1, OUTPUT); pinMode(INH_1, OUTPUT); pinMode(IS_2, INPUT); pinMode(IN_2, OUTPUT); pinMode(INH_2, OUTPUT); pinMode(fari, OUTPUT); pinMode(led_1, OUTPUT); // Impostazione pin gestione motori analogWrite(IN_1, 0); // set motor speed to 0 digitalWrite(INH_1, HIGH); // enable OUT1 analogWrite(IN_2, 0); // set motor speed to 0 digitalWrite(INH_2, HIGH); // enable OUT2 digitalWrite(led_1, HIGH); // robot operativo while (!Console) { ; // Attesa per la connessione con la Console. } Console.println("Connessione stabilita!!!!"); digitalWrite(led_1, HIGH); } void loop() { //Messaggio iniziale Console.println(""); Console.println("TEST FUNZIONAMENTO RoboYun"); Console.println("By Adriano Gandolfo"); Console.println(""); //Test funzionamento fari Console.println("TEST FUNZIONAMENTO FARI"); Console.println("Fari accesi"); digitalWrite(fari, HIGH); delay (1000); Console.println("Fari spenti"); digitalWrite(fari, LOW); delay (1000); Console.println(""); //Test funzionamento led blu Console.println("TEST FUNZIONAMENTO LED BLU"); Console.println("Led BLU acceso"); digitalWrite(led_1, HIGH); delay (1000); Console.println("Led BLU spento"); digitalWrite(led_1, LOW); delay (1000); // Test del servo Pan Console.println(""); Console.println("TEST FUNZIONAMENTO SERVO MOVIMENTO PAN"); panservo.write(45); delay(1000); panservo.write(0); delay(1000); panservo.write(90); delay(1000); panservo.write(135); delay(1000); panservo.write(160); delay(1000); panservo.write(90); delay(1000); // Test del servo TILT Console.println(""); Console.println("TEST FUNZIONAMENTO SERVO MOVIMENTO TILT"); tiltservo.write(45); delay(1000); tiltservo.write(0); delay(1000); tiltservo.write(90); delay(1000); tiltservo.write(135); delay(1000); tiltservo.write(160); delay(1000); tiltservo.write(90); delay(1000); // Test sensore float t = dht.readTemperature(); float h = dht.readHumidity(); Console.println(""); Console.println ("TEST SENSORE TEMPERATURA/UMIDITA'"); Console.print ("Temperatura :"); Console.print (t); Console.println (" C"); Console.print ("Umidita' :"); Console.print (h); Console.println (" %"); // Test funzionamento motori // Robot AVANTI Console.println(""); Console.println ("TEST FUNZIONAMENTO MOTORI"); Console.println("Robot Avanti"); avanti(vel); delay(2000); // Robot INDIETRO Console.println("Robot Indietro"); indietro(vel); delay(2000); // Robot a DESTRA Console.println("Robot rotazione oraria"); destra(vel); delay(2000); // Robot a Sinistra Console.println("Robot rotazione antioraria"); sinistra(vel); delay(2000); //Robot fermo Console.println("Robot fermo"); fermo(); delay(5000); } //Routine void avanti(int motorSpeed) { digitalWrite(rele_1, HIGH); digitalWrite(rele_2, HIGH); delay (100); analogWrite(IN_1, motorSpeed); analogWrite(IN_2, motorSpeed); } void indietro(int motorSpeed) { digitalWrite(rele_1, LOW); digitalWrite(rele_2, LOW); delay (100); analogWrite(IN_1, motorSpeed); analogWrite(IN_2, motorSpeed); } void destra(int motorSpeed) { digitalWrite(rele_1, HIGH); digitalWrite(rele_2, LOW); delay (100); analogWrite(IN_1, motorSpeed); analogWrite(IN_2, motorSpeed); } void sinistra (int motorSpeed) { digitalWrite(rele_1, LOW); digitalWrite(rele_2, HIGH); delay (100); analogWrite(IN_1, motorSpeed); analogWrite(IN_2, motorSpeed); } void fermo() { digitalWrite(rele_1, LOW); digitalWrite(rele_2, LOW); analogWrite(IN_1, 0); analogWrite(IN_2, 0); }
Collegamento webcam
Vediamo ora come collegare la webcam C170 alla scheda Arduino Yún.
La distribuzione Linino in esecuzione su Arduino Yún è in grado di gestire le webcam supportate dal driver UVC.
Prima di collegare la webcam, dobbiamo però installare qualche pacchetto software, per questo motivo dovremmo necessariamente collegare Arduino Yún in rete con la possibilità di navigare in internet.
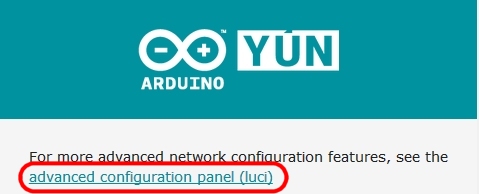
Una volta collegati con un browser (Internet Explorer, Google Crome o quello che preferite) dovrete accedere all’interfaccia grafica di Arduino e, dopo aver inserito la password, poi “Configure” e “Advanced configuration panel”:
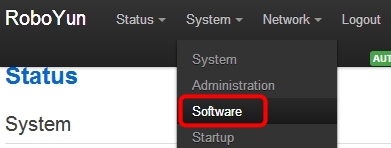
Ora dal menu selezioniamo System, e poi Software:
Premiamo il pulsante Update lists per aggiornare la lista dei software disponibili:

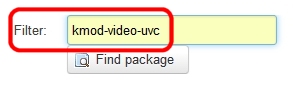
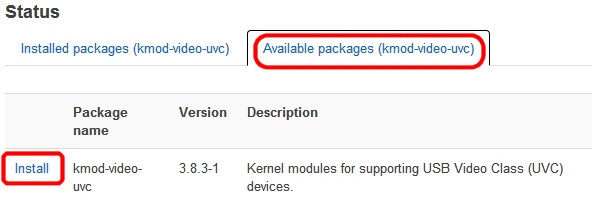
Nel campo filtro digitiamo il nome del pacchetto kmod-video-uvc, spostiamoci nel tab Available packages e installiamolo:
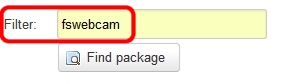
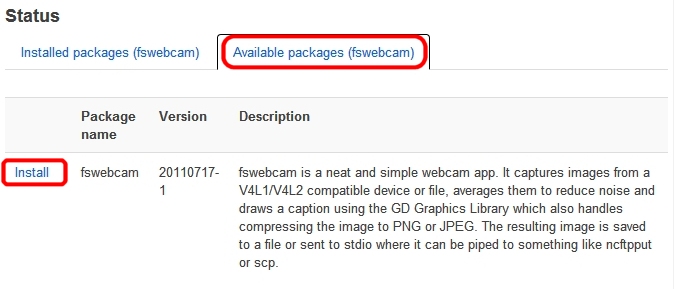
Facciamo lo stesso per il pacchetto fswebcam:
Colleghiamo ora la webcam alla porta USB Host di Arduino Yún . Per essere sicuri che Linino l’abbia riconosciuta, visualizziamo il System log di sistema:
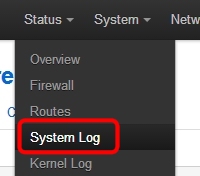
Tra le informazioni mostrate dovreste vedere quelle che riportano le informazioni della webcam, segno che è stata correttamente configurata:

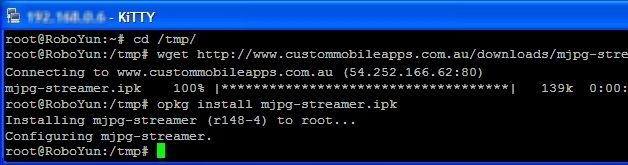
Dato che il nostro progetto prevede la trasmissione di uno streaming video, è necessario caricare un’ulteriore applicativo, realizzato sempre per Linux che è denominato mjpg-streamer. Questo applicativo è in grado di catturare il video dalla webcam e renderlo disponibile tramite interfaccia web.
Per l’installazione dovremo spostarci nella cartella /tmp e scaricare il pacchetto tramite wget (che è un gestore di download per Linux)
wget http://www.custommobileapps.com.au/downloads/mjpg-streamer.ipk
Installiamo il pacchetto con opkg:
opkg install mjpg-streamer.ipk
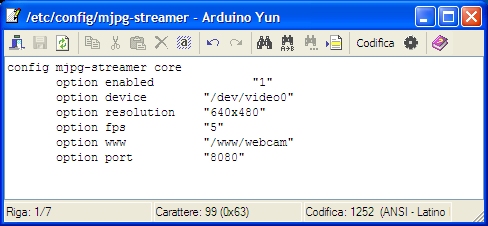
Procederemo a questo punto a modificare il file /etc/config/mjpg-streamer mettendo a 1 il parametro enabled.
Sempre nello stesso file potremo cambiare risoluzione, frame rate…,ecc.
Per fare questo è stato utilizzato WinSCP che è un client grafico open source per Windows per SFTP e FTP. La sua funzione principale è quella di copiare in modo sicuro file tra un computer locale e uno remoto, ma permette tra le altre cose di muoversi agevolmente nelle varie cartelle di Arduino Yún
Eseguiamo ora il programma:

Collegandoci con il browser all’indirizzo di Yún e alla porta 8080 possiamo visualizzare l’interfaccia di mjpg-streamer, e se selezioniamo la voce Stream potremo vedere il video proveniente dalla webcam. A questo punto saremo sicuri che tutto il processo d’installazione ha avuto successo.

Filmato illustrativo
E’ possibile vedere l’esecuzione del programma visionando il filmato:
Conclusioni
Termina così quest’articolo in cui si sono analizzate le parti che costituiscono il nostro robot a comando Wi-Fi, lo shield di Infineon e la possibilità di utilizzarlo per la gestione di una coppia di motori, aggirando la limitazione dovuta alla presenza di un solo ponte H.
Abbiamo anche visto come utilizzare una semplice webcam in accoppiamento con una scheda Arduino Yún per permettere la trasmissione di filmati in streaming.
Nel prossimo articolo vedremo l’interfaccia di comando e lo doteremo del programma completo.
Chi vorrà potrà comunque partire da questa base per realizzare una propria versione di robot, inserendo magari altri sensori, permettendo al robot di muoversi autonomamente: per esempio inserendo dei sensori radar in modo da controllare la presenza di eventuali ostacoli, mentre l’inserimento di un sensore di luce permetterebbe la gestione in automatico dell’accensione dei fari.


Ottimo progetto.
Complimenti, articolo preciso e dettagliato …… d’altronde come sempre.
Una domanda tecnica: è possibile installa OpenCV su l’Arduino YUN?
Grazie Ernesto, Per quanto riguarda le librerie OpenCV, la bassa velocità del processore non ne permette la piena operatività, Meglio rivolgersi ad altre schede come la Raspberry Pi,
Complimenti per il progetto.
Visto il costo esoso dello Yun volevo sapere se è possibile usare l’ Arduino uno aggiungendo il modulo wifi? Grazie
Se ti basta la gestione del robot via Wi-Fi, e non vuoi utilizzare la webcam, lo puoi fare, certamente devi adattare il programma al tipo di moduli Wi-Fi.
Ho trovato uno shield Iduino ( Geeetech) simile allo Yun e vorrei sapere se è compatibile inoltre è sprovvista di slot micro sd, è importante che ci sia? Grazie
Da quello che ho visto sul sito del produttore sembrerebbe compatibile, in realtà la SD serve solo per salvare il programma, ma vista la quantità di memoria può anche essere salvato direttamente sulla scheda.
E’ possibile sostituire il motor shield della infineon con il seguente modulo L293D http://www.geeetech.com/special-motor-drive-shield-p-223.html
E’ compatibile? Inoltre le I/O corrispondono all’infineon?
Grazie
Si puoi sostituire la scheda motore, se utilizzi questa puoi anche evitarti, o modificare lo shield con i relè, in quanto l’inversione può essere fatta utilizzando il’integrato L293 che possiede all’interno un doppio ponte H. Per quanto riguarda i pin non è un grosso problema, in quanto è sufficiente inserire nel programma la numerazione dei pin di comando. Considera che cambiando la scheda dovrai adattare comunque il programma.
Oppure mi consiglia questo shield
http://it.aliexpress.com/item/Free-Shipping-Monster-Moto-Shield-VNH2SP30-stepper-motor-driver-module-high-current-30A-for-arduino/2040328642.html
Grazie per la sua cortese attenzione
Questo modulo è sicuramente più potente dell’altro permettendo di pilotare motori che assorbono sino a 30A (uguale a quella che garantisce il modulo Infineon ), a differenza dell’integrato L293 che è limitato a 0,6A.- 1,2A di picco. Dipende dai motori che intendi utilizzare.
I motori che voglio utilizzare sono compresi nel kit http://it.aliexpress.com/item/1Set-2WD-Mini-Round-Double-Deck-Smart-Robot-Car-Chassis-DIY-Kit-for-Arduino/32351918602.html
Grazie
A quanto vedo i motoriduttori sono analoghi a quelli da me utilizzati, per cui potresti anche utilizzare la scheda con l’integrato L293D..
Se vuoi tentare l’autocostruzione, puoi basarti su un mio progetto http://www.adrirobot.it/arduino/shield_l293/arduino_shield_l293.htm
Se ho problemi, posso contattarla in privato?
Grazie
Certo, nessun problema.