
Utilizzare Roomba, l’aspirapolvere robot, a distanza e far segnalare lo status su Twitter mentre si è lontani da casa. Il dispositivo progettato con l’ausilio di Arduino è indipendente da un computer. Lui è Roomba è uno dei trend degli ultimi anni che è entrato nelle case di molti italiani per combattere la polvere. ..Ma forse non proprio tutti sono rimasti entusiasti dei suoi risultati.
Roomba è un robot domestico per la pulizia dei pavimenti prodotto da iRobot a partire dal 2002. Nel febbraio del 2011 il CEO di iRobot, Colin Angle, ha dichiarato che sono stati venduti nel mondo oltre 6 milioni di robot domestici iRobot. Il robot ha la forma di un disco dal diametro di 34 cm e alto 9 cm. Calcola il suo itinerario tramite un algoritmo che elabora i dati dei sensori posti sul paraurti e su altri sensori IR. Il sistema di pulizia è costituito da 3 spazzole e da una unità di aspirazione.
Il progetto prevede l’utilizzo dei seguenti componenti:
* 1x - Transistor di potenza PNP 2N2907A
* 1x - 8-pin mini-DIN connettore maschio
* 1x - 7805, regolatore di tensione 5V
* 1x - Solderless breadboard
* 1x - scheda Arduino
* 1x - SparkFun WiFly Arduino
Arduino è una piattaforma hardware per il physical computing sviluppata all’Interaction Design Institute di Ivrea, un istituto fondato dalla Olivetti e da Telecom Italia. Arduino è basata su una semplicissima scheda di I/O e su un ambiente di sviluppo che usa una libreria Wiring per semplificare la scrittura di programmi in C e C++ da far girare sulla scheda. Arduino può essere utilizzato per lo sviluppo di oggetti interattivi stand-alone ma può anche interagire, tramite collegamento, con software residenti su computer, come Adobe Flash, Processing, Max/MSP, Pure Data, SuperCollider.
Tutte le Roomba serie 500 hanno un connettore seriale. Useremo questa porta seriale per il controllo e la lettura dei dati dal sensore Roomba. Il connettore seriale è a 8-pin mini-DIN con il blocco al centro. Lo schema elettrico di connessione sulla breadboard è il seguente:
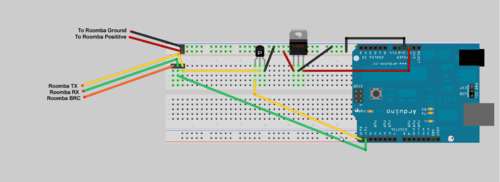
La potenza di uscita di Roomba può essere fino a 20W quando è in carica; mentre il regolatore di tensione Arduino può gestire questa situazione, il regolatore di tensione WiFly 3.3V non può. Bisogna aggiungere al circuito uno di regolazione della tensione. Per fare questo si usa un regolatore di tensione 7805 per portare la tensione fino a 5V.
Comunicare con il Roomba è in realtà abbastanza semplice. Porta seriale del iRobot Roomba utilizza Open Interface (OI) protocollo per comunicare con altri dispositivi (come la Arduino). Mentre la OI può fornire il pieno controllo dei motori del Roomba e LED, può anche essere utilizzato per altri scopi (tipo la pulizia).
Il robot è alimentato da una batteria NiMH con tempi di ricarica che oscillano tra le 12 ore (nella prima generazione di robot, per un'autonomia massima di 1,5 ore) e le 3 ore (dalla seconda in poi, per un'autonomia massima di 2 ore). Finora sono state prodotte 4 generazioni di Roomba. La Roomba Open Interface è un'interfaccia aperta tramite la quale un computer o un altro dispositivo può comunicare con il robot tramite la sua porta seriale. Nella prima generazione era necessario indicare, tramite gli appositi pulsanti, la dimensione della stanza da pulire; nelle generazioni successive del robot, il calcolo delle dimensioni della stanza viene effettuato in maniera automatica, e i tre pulsanti sono stati raggruppati in un unico tasto denominato CLEAN.
La maggior parte delle guide per l'aggiunta di Twitter al Arduino richiedono un computer per fare il Tweeting reale. Vi è, tuttavia, un altro eccellente libreria (da NeoCat @) che si può utilizzare per rendere il Tweet Arduino senza l'ausilio di un computer. La libreria è scaricabile gratuitamente dal seguente link: http://www.arduino.cc/playground/Code/TwitterLibrary .

