Il motore passo-passo è una scelta diffusa per il controllo intelligente del movimento di precisione. A differenza di un motore a corrente continua standard, che è progettato per la rotazione costante, il motore passo-passo gira attorno ad un asse un passo alla volta. Per questo è ideale per le applicazioni che richiedono precisione nel posizionamento e nel controllo della velocità. Tuttavia, per garantire che il controllo del motore rimanga preciso in tutti i punti di funzionamento dell'applicazione, è importante regolare il motore in base al controller.
Introduzione
Un tipico motore passo-passo comprende uno statore, un rotore collegato a un albero e un numero di avvolgimenti che vengono utilizzati per generare campi magnetici in posizioni fisse intorno allo statore. In un motore passo-passo a magneti permanenti, il rotore utilizza un disco di materiali magnetici. Il disco può avere solo due poli. Un disco più complesso, generalmente utilizzato nei motori di precisione, può interlacciare molti poli attorno alla sua parte esterna. Un motore passo-passo a riluttanza variabile, invece, ha un funzionamento completamente elettromagnetico. Quando si toglie corrente, il motore non resisterà alla rotazione fornita da forze esterne. In un motore a magneti permanenti, quando l'alimentazione viene applicata al motore, il rotore cercherà la posizione più stabile disponibile. Il campo elettromagnetico generato nella bobina attrarrà un polo del magnete formato sul rotore e respingerà l'altro. Quando sul disco il polo opposto più vicino si allinea con il campo elettromagnetico generato dalla bobina, il rotore si fermerà e rimarrà fisso in questa posizione, mentre il campo nella bobina rimane invariato. Se si elimina il flusso di corrente in questa bobina e lo si applica a un'altra in una posizione diversa, i magneti vengono attratti dalla posizione stabile successiva in cui il rotore può fermarsi di nuovo.
Il controllo
In genere un motore a riluttanza variabile utilizza un certo numero di bobine nello statore, disposte a coppie contrapposte. Un motore trifase avrà tre coppie di questo tipo. L'alimentazione elettrica fornita a ciascuna coppia di bobine, a sua volta, sposta il rotore metallico di un passo alla volta. A causa delle limitazioni meccaniche, il rotore può ruotare su richiesta solo fino a una certa velocità massima. La coppia del motore sarà tipicamente massimizzata alle basse velocità. Di conseguenza, i motori vengono spesso utilizzati a velocità basse per fornire la coppia massima e il massimo livello di controllo. La risoluzione può essere aumentata tramite micropassi. Nel funzionamento normale la corrente di una bobina non viene eliminata completamente prima che venga attivata la bobina successiva. La corrente viene invece ridotta in una bobina mentre viene aumentata nell'altra. Se questa condivisione della corrente viene controllata tra le due bobine, la situazione crea passi virtuali più piccoli, anziché cercare di azionare il motore utilizzando transizioni di corrente discrete. In linea di principio, due segnali sinusoidali, uno spostato in fase di 90° rispetto all'altro, possono creare un movimento continuo fluido. In pratica, le forme d'onda non sono del tutto sinusoidali – il livello di corrente della bobina in ciascuna posizione ha un livello discreto. In questo modo, la tecnica del microstepping (microavanzamento) crea un movimento più fluido e può aiutare a ridurre il rumore e le vibrazioni del motore rispetto allo spostamento a passi completi. Tuttavia, il controllo preciso della corrente sul motore è importante per mantenere un controllo preciso, soprattutto alle basse velocità decade, perché può accadere che il motore perda micropassi inaspettatamente (Figura 1).
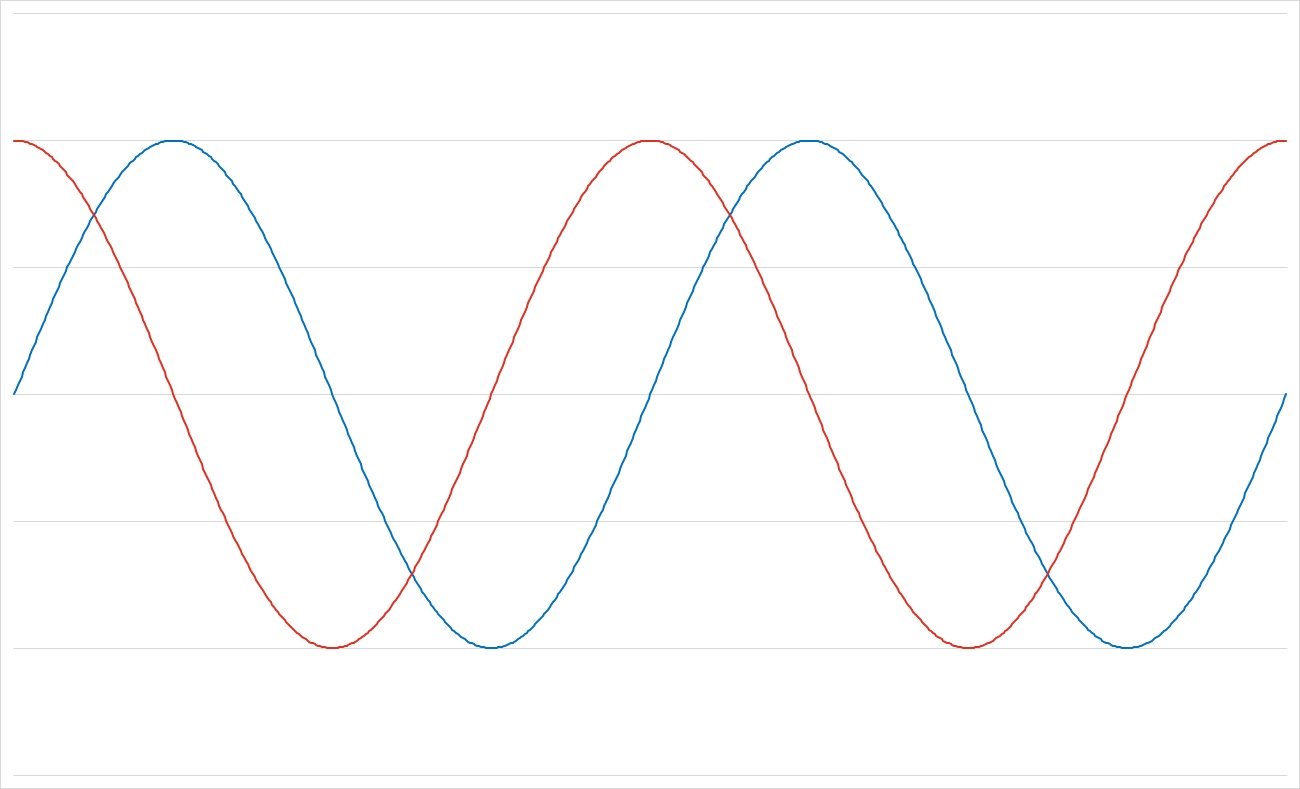
Figura 1: Coppia di forme d'onda sinusoidali graduali per microstepping controllato
I livelli di corrente specifici vengono normalmente generati utilizzando tecniche di chopping PWM (modulazione di larghezza di impulso). Un ponte H di due coppie di transistor di potenza trasporta la corrente tagliata alle bobine del motore. In genere la corrente di azionamento viene normalmente interrotta quando la corrente tagliata raggiunge la soglia del micropasso in questione. Oltre questo punto, la corrente inizia a decadere. Il profilo di questo decadimento dipenderà dal funzionamento del ponte H (Figura 2a e 2b).
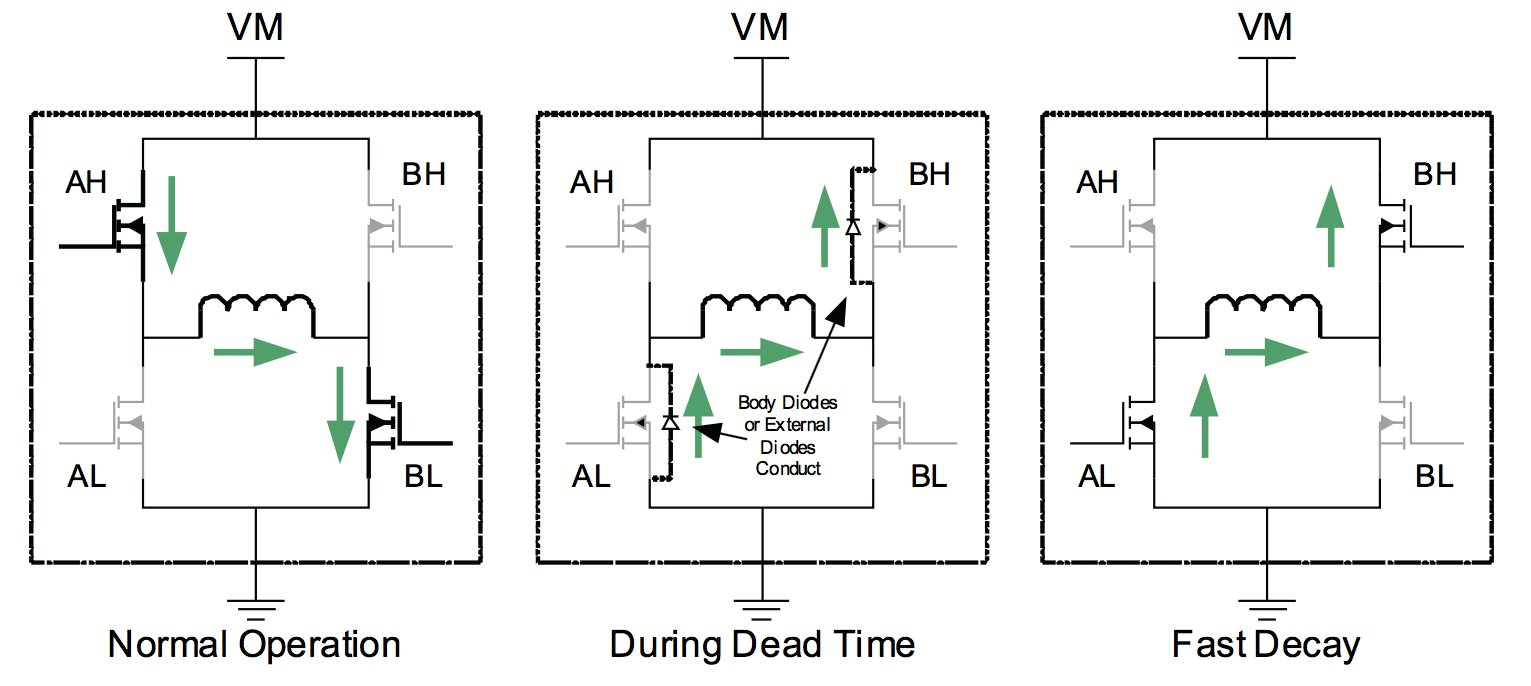
Figura 2a: Flusso di corrente del ponte H per la modalità di decadimento rapido (immagine su gentile concessione di Texas Instruments)
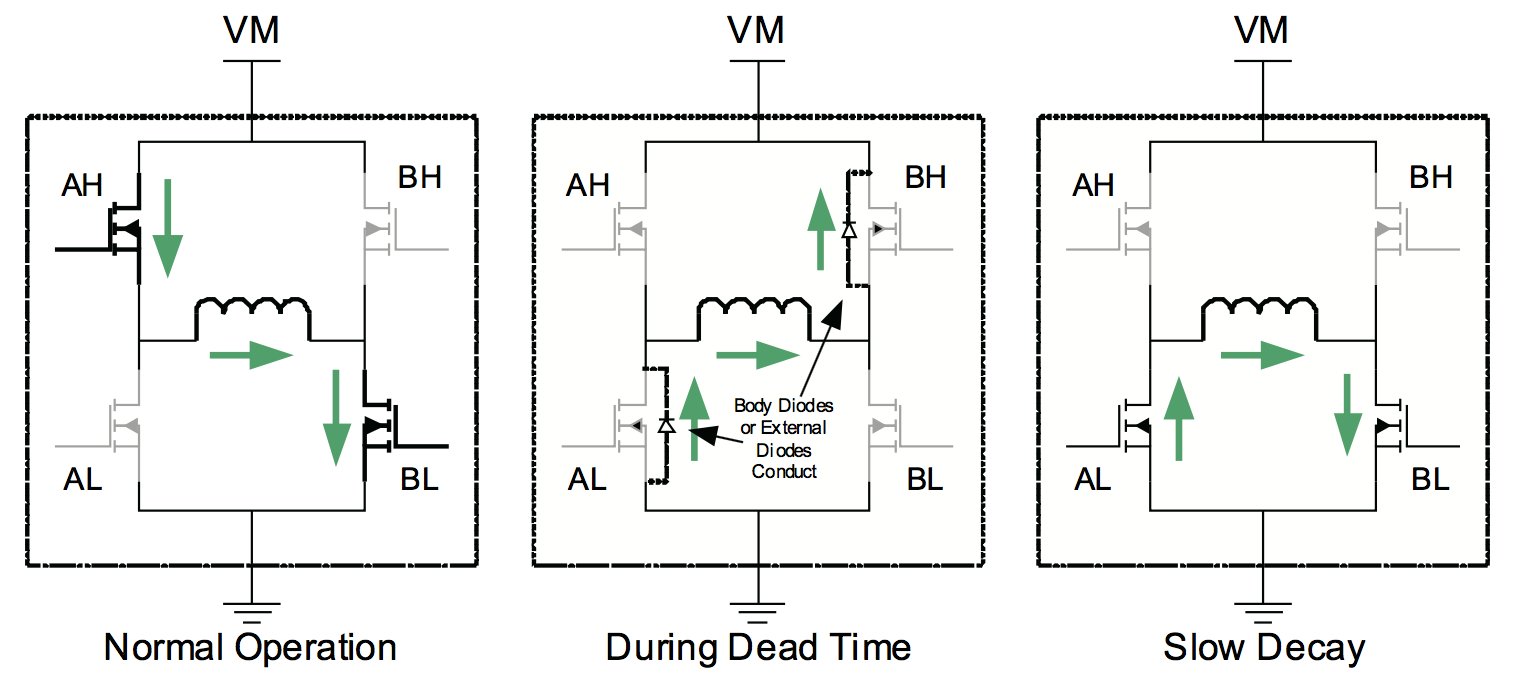
Figura 2b: Flusso di corrente del ponte H per la modalità di decadimento lento (immagine su gentile concessione di Texas Instruments)
Con il decadimento lento, la corrente viene rimessa in circolo utilizzando entrambi i transistor di potenza del fronte alto. L'inconveniente di questa modalità è che il decadimento lento può limitare la quantità di corrente che deve essere regolata per azionare il motore. Il decadimento rapido utilizza il ponte H per invertire la tensione attraverso la bobina, cosa che provoca la caduta rapida della corrente. Tuttavia, questo può portare ad ampie correnti di ripple che ostacolano l'efficienza e possono non essere adatte ai livelli di corrente elevati potenzialmente richiesti dal motore azionato (Figura 3).
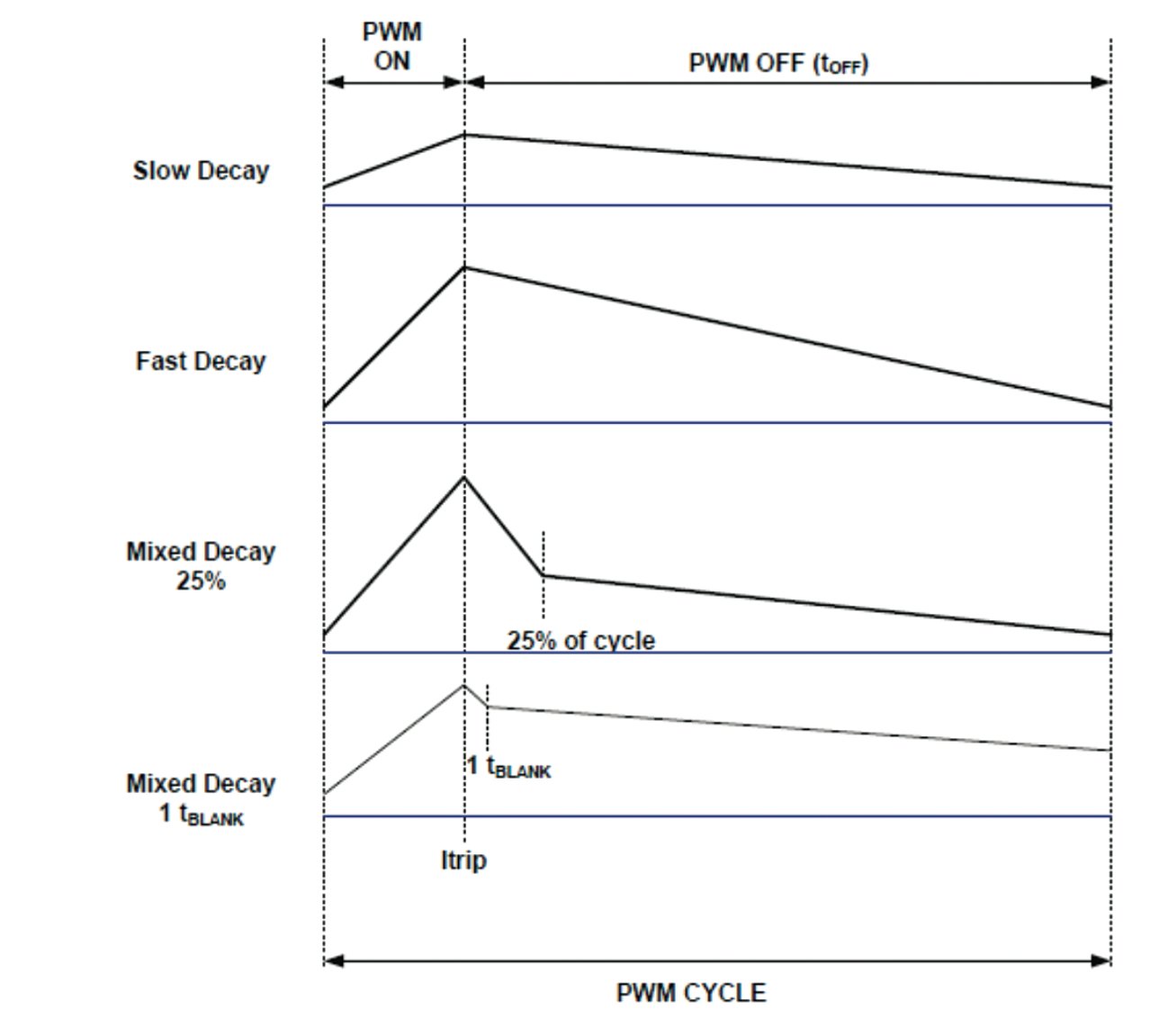
Figura 3: Decadimento della corrente in modalità lenta, rapida e mista (immagine su gentile concessione di Texas Instruments)
Il decadimento misto combina le due modalità. Si inizia con un decadimento rapido per poi passare, dopo un tempo stabilito, al decadimento lento. Questa soluzione è adatta alla maggior parte delle situazioni di microstepping, ma richiede che l'algoritmo di controllo sia ottimizzato per il motore specifico in uso. La regolazione dipende dall'intensità della corrente di carico, dalla tensione di alimentazione e dalla velocità di avanzamento. Di solito le correnti di carico inferiori richiedono un diverso mix di decadimento rapido e lento rispetto alle correnti di carico più elevate. Tradizionalmente, lo schema migliore consiste nel passare attraverso rapporti di decadimento fissi e osservare il profilo di corrente su un oscilloscopio per una determinata sequenza di microstepping. Il problema principale degli schemi di decadimento fissi è che non reagiscono ai cambiamenti delle condizioni. I parametri possono variare durante il funzionamento, come ad esempio la forza elettromotrice inversa (EMF) e la velocità di microstepping che influenzano i livelli di corrente e tensione in modo dinamico. L'ottimizzazione di una velocità di passo elevata, che di solito viene raggiunta attraverso l'applicazione di un più alto rapporto di decadimento rapido e lento, può determinare un’eccessiva ondulazione della corrente quando il motore è fermo o si muove lentamente passo-passo. Se il sistema è alimentato a batteria, la tensione fornita dalla cella diminuirà man mano che la carica si esaurisce, quindi, se non viene regolata, determinerà l'applicazione di condizioni di tensione diverse al motore. E con l'invecchiamento del motore, il profilo di decadimento iniziale può diventare sempre più inadatto. La risposta è quella di scegliere algoritmi che si adattano alle mutevoli condizioni del motore. I comandi passo-passo e il comportamento PWM possono indicare dove impostare il punto di commutazione del decadimento su base passo-passo. In ogni ciclo PWM, il controller passa al ponte H in un punto preciso. La regolazione adattiva "ricorda" la tempistica di commutazione e la utilizza per determinare il rapporto di decadimento rapido-lento per il passo successivo. Monitorando i comandi di avanzamento - notando se il motore si sta muovendo rapidamente o no - la percentuale di decadimento rapido può essere aumentata e diminuita in base alla richiesta del motore. Quando il motore rallenta, la quantità di decadimento rapido può essere ridimensionata. Questi algoritmi possono essere incorporati nel firmware del microcontroller, ma sono disponibili anche nei controller per motori passo-passo standard, come il modello Texas Instruments DRV8846. Lo schema di decadimento adattivo utilizzato nel DRV8846 compensa automaticamente la tensione di alimentazione, l'induttanza del carico, la resistenza del carico, l'EMF inversa e l'intensità della corrente. Attraverso l'uso del decadimento adattivo, il DRV8846 non necessita più di pin di controllo che normalmente sarebbero utilizzati per impostare il rapporto di decadimento, il che consente di risparmiare sul costo del package. Inoltre, l'algoritmo è progettato in modo da utilizzare, per quanto possibile il decadimento lento, che si traduce in un design a risparmio energetico. Questo perché la corrente circola solo attraverso i transistor di potenza sul fronte basso, in genere con maggiore efficienza rispetto alla commutazione al ponte H in una configurazione inversa. Una strategia utilizzata da un altro dispositivo con decadimento adattivo, l'L6472 STMicroelectronics, consiste nel monitorare il segnale di commutazione PWM sui passi di salita e discesa per determinare se si verifichino prima o dopo un valore minimo impostato su ogni micropasso. Se la soglia di corrente di destinazione viene raggiunta prima del tempo minimo impostato, si utilizza un decadimento rapido al posto del normale decadimento lento fino a un punto stabilito da un tempo di decadimento rapido massimo programmato. Se si incontrano due decadimenti rapidi durante una serie di passi in salita, l'algoritmo continuerà a immetterli finché il motore si ferma o viene attraversata l'onda sinusoidale zero. Sui passi in discesa, l'algoritmo nell'L6472 dapprima utilizzerà il decadimento rapido anziché quello lento per raggiungere il livello target il più rapidamente possibile. Tuttavia, per evitare la formazione di forti correnti di ripple, l'algoritmo si adatterà nel tempo per aumentare la soglia di decadimento rapido che porterà allo spostamento in modalità di decadimento lento, a meno che la richiesta di corrente cambi al punto da richiedere il decadimento rapido. Il risultato è un bilanciamento continuo della modalità reale e di decadimento lento.
Conclusioni
Grazie a metodi più intelligenti per l'applicazione del decadimento della corrente alle bobine dei motori passo-passo, è possibile sfruttare il profilo di movimento più fluido del microstepping e garantire che il motore risponda bene alle variazioni di tensione, alle condizioni operative e anche all'invecchiamento.
A cura di Mark Patrick, Mouser Electronics

I motori passo-passo trovano spazio in molte applicazioni di microstepping. In esperimenti della fisica, per esempio, sono utilizzati per muovere le ottiche in esperimenti volti alla creazione di raggi x, ma anche per regolare l’energia dei laser. Il mercato di IC controller è molto vasto, così come moduli di molte case costruttrici dotati di comunicazione TCP/IP o seriale per una facile gestione e con una GUI molto intuitiva.