
Gli induttori sono i componenti passivi meno usati e certamente meno conosciuti, per varie ragioni, e questo è particolarmente vero per le cosiddette "ferriti", induttanze costruite con nucleo in materiale magnetico sintetico.
Resistori e condensatori risultano familiari a tutti i progettisti elettronici e sono considerati componenti ‘semplici’, anche se possono riservare anch’essi sorprese in alcune condizioni di funzionamento. Gli induttori sono decisamente meno usati, trovando applicazione in filtri, oscillatori e soppressione di disturbi elettromagnetici, una forma particolare di filtraggio. Il loro dominio di applicazione è fondamentalmente la Radio Frequenza, alimentazioni switching e audio, cosa che ne fa quasi degli sconosciuti per progettisti digitali e applicazioni embedded. Caratteristica degli induttori è offrire una impedenza nulla in continua e crescente al crescere della frequenza, opponendosi, quindi, alla propagazione di segnali indesiderati ad alta frequenza, secondo la nota formula:
Z = 2p * f * L
Il comportamento dell’induttore ideale è il reciproco del condensatore, il quale invece offre impedenza decrescente al crescere della frequenza. Naturalmente, il comportamento dei componenti reali è più complesso e spesso fortemente non lineare, cosa che spiega in buona parte il difficile rapporto con questi dispositivi. La forma più semplice di induttore è costituita da una bobina di filo avvolto su un supporto isolato. Per aumentare il valore di induttanza si può avvolgere la bobina su un nucleo di materiale magnetico (tipicamente leghe di ferro). Valori ancora maggiori si possono ottenere con nuclei ceramici composte solitamente da un misto di ossidi di ferro con Zinco-Manganese o Zinco-Nickel, dette appunto ferriti. Quest’ultimo caso è oggetto di questo articolo perché, come descritto nell’Application Note in Rif. 1, le ferriti trovano impieghi sempre più diffusi anche fuori dai campi tradizionali e richiedono qualche cautela nell’uso. Come vedremo, le ferriti sono anche spesso visibili come curiosi rigonfiamenti cilindrici sui cavi USB o video verso computer e apparecchiature multimediali. Nei progetti digitali moderni, in particolare basati su FPGA o microprocessori veloci, le frequenze operative salgono a molte centinaia di MHz o GHz. La coesistenza sulla stessa board, quando non nello stesso chip, di circuiteria digitale cosi veloce con circuiteria analogica e con i driver ad alta velocità, suggerisce la separazione delle alimentazioni anche di eguale valore in continua, per isolare i circuiti più sensibili dalle sorgenti di rumore. In particolare, rumore elettrico presente sulle alimentazioni della circuiteria analogica dei generatori di clock PLL (Phase Locked Loop) rischia di modulare il segnale digitale da questi prodotto e contribuire al jitter complessivo. Questo ha influenza sulla ripetibilità delle transizioni del clock creando una banda di indeterminazione e riduce i margini temporali di lavoro dell’applicazione. D’altra parte, lo split nelle alimentazioni crea complicazioni nel routing e rischia di aumentare il costo del PCB, imponendo a volte l’uso di piani aggiuntivi. Una possibile soluzione, quando accuratamente progettata, è rappresentata dall’uso delle ferriti nella separazione locale di una alimentazione dal piano di distribuzione globale della scheda. La nuova alimentazione creata a valle della ferrite viene separata ad alta frequenza dall’alimentazione madre, con un minimo di disturbo al routing e costo aggiuntivo. E’ di fondamentale importanza che il decoupling realizzato a valle della ferrite sia tale da garantire bassa impedenza in tutta la gamma di frequenza richiesta, garantisca cioè la Target Impedance richiesta dallo specifico carico (vedi Rif. 2). La rete di alimentazione generale non sarà infatti, più in grado di soddisfare picchi di corrente a frequenza elevata, essendo questi filtrati dall’impedenza della ferrite, insieme al rumore esterno che si intende sopprimere. I componenti più semplici basati su ferriti sono anche chiamati ‘beads’ (letteralmente ‘perline‘), perché consistono in un conduttore inglobato nel materiale ceramico. Nella loro forma originale, erano componenti da infilare su fili passanti di cui realizzavano il filtraggio. Oggi esistono anche come componenti a montaggio superficiale. Le ‘ferrite beads’ si distinguono, quindi, dagli induttori generici per non avere avvolgimenti di filo su nucleo magnetico. Le ferriti sono disponibili in due diverse tipologie fondamentali, Q elevato, da non usare in applicazioni digitali, e basso Q (si ricorda qui che il Fattore di Merito Q = L / R esprime sostanzialmente quanto prevale il comportamento induttivo rispetto al comportamento dissipativo/resistivo del componente). Le ferriti a basso Q sono progettate in modo da dissipare l’energia HF in calore nel nucleo, attraverso le perdite per isteresi magnetica e correnti di perdita indotte nel nucleo (Eddy currents o correnti di Focault). Abbiamo, quindi, l’energia su una banda di frequenza relativamente ampia effettivamente dissipata ed eliminata dal nostro sistema, non semplicemente riflessa o dirottata come nell’uso di filtri con componenti reattivi. I costruttori specificano le caratteristiche delle loro ferriti come grafici Impedenza verso Frequenza, oltre a fornire la massima resistenza e corrente nominale in continua. Questi dati sono importanti perché lavorando a correnti elevate si può incorrere nel fenomeno di saturazione del nucleo, dove il suo contributo all’induttanza complessiva risulta sostanzialmente ridotto, se non annullato. Bisogna quindi scegliere un componente in grado di lavorare a correnti ben inferiori alla saturazione. Se osserviamo un datasheet come quello indicato in Rif. 3, è fondamentale non fermarsi nella selezione al valore di impedenza indicato in condizioni normalizzate, per permettere una facile classificazione del componente (ad esempio, 120 ohm a 100MHz per BLM18AG121SN), ma proseguire la lettura e prendere visione dell’andamento dell’impedenza presentata nei grafici delle pagine successive, confrontandolo con le bande di lavoro della propria applicazione. La significativa variazione di cui si può prendere visione, è una delle complicazioni nella scelta del componente più adatto. Le simulazioni circuitali sono in grado di aiutare nella verifica del comportamento del componente scelto ma come prima cosa, occorre costruirne un modello affidabile. Il modello presentato in figura 2 è considerato affidabile per frequenze inferiori ad 1 GHz.
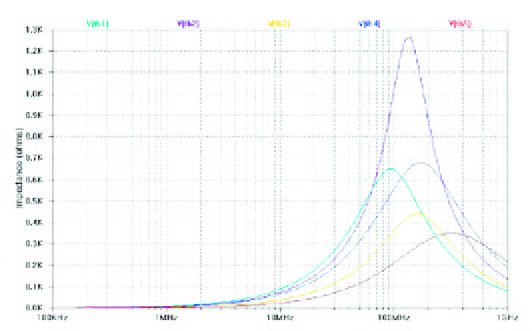
Figura 1: confronto tra cinque ferriti.
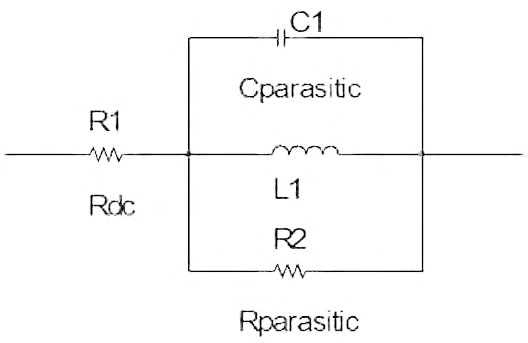
Figura 2: modello Spice di un induttore
con nucleo in ferrite.
Questo modello è usabile quando non sia fornito un modello SPICE direttamente dal produttore del componente, pratica quest’ultima sempre più comune. Nel modello, Rdc rappresenta la resistenza ohmica delle connessioni, Rparasitic è la resistenza parallelo equivalente dovuta alle perdite nel ferro, Cparasitic la capacità parassita dovuta alla granularità del materiale. L, infine, l’induttanza ideale, nominale del componente. I parametri parassiti non sono costanti, se non in prima approssimazione, variando con la temperatura, frequenza e corrente di carico. Possiamo notare dalle simulazioni ma anche dalle curve di figura 1, che la natura dell’impedenza serie presentata cambia notevolmente in particolare con la frequenza. A bassa e media frequenza la ferrite ha basse perdite e si comporta, quindi, come un buon induttore (Q relativamente elevato). Tipicamente, a frequenze maggiori di qualche decina di MHz, i fenomeni dissipativi prevalgono ed il comportamento è resistivo (in ac). Questa è la regione in cui le ferriti sono utili, dissipando in calore l’energia elettromagnetica associata alle frequenze che si intendono filtrare. Aumentando ancora la frequenza, l’efficacia della ferrite diminuisce perché inizia ad essere cortocircuitata dalla capacità parassita, in parallelo all’induttanza. Componenti recenti possono, comunque, mantenere le loro caratteristiche fino a frequenze dell’ordine del GHz. La verifica del corretto comportamento della ferrite scelta, andrebbe eseguita aggiungendo la ferrite alla rete di disaccoppiamento del ramo di alimentazione considerato e simulando con un simulatore circuitale SPICE o equivalente. Occorre analizzare la caduta di tensione della PDN ottenuta (Power Distribution Network), curando che si mantenga un buon margine verso la minima tensione di alimentazione dei componenti il ramo circuitale in oggetto. Va poi prestata attenzione ad ogni picco di impedenza che potrebbe violare i limiti di Impedenza Target proprio dell’applicazione. Tali picchi si curano con l’aggiunta di un condensatore calcolato per avere una frequenza di auto risonanza serie prossima alla frequenza corrispondente al picco. La risposta ai transienti va anche verificata per accertare l’assenza di sovra oscillazioni dovute all’effetto di Q elevato in certe bande di frequenza. Overshoot e ringing possono anche essere dovuti ad oscillazioni innescate tra l’induttanza della ferrite ed i condensatori di decoupling. Occorrerà, in tal caso, scegliere una diversa ferrite con minore induttanza nominale. Teniamo presente che l’impedenza della sorgente di alimentazione vista dal carico, dovrà essere una frazione dell’impedenza del carico stesso, come sempre quando si vuole ottenere una buona regolazione della tensione di alimentazione.
Ecco la procedura raccomandata progettando filtri di alimentazione con ferriti:
- scegliere una ferrite con corrente nominale almeno doppia della massima corrente di carico attesa per il ramo di alimentazione filtrato. Questo garantisce di evitare saturazioni del nucleo;
- stabilire la massima resistenza serie accettabile e ridurre al minimo la resistenza in continua del filtro, in modo da ridurre cadute di tensione;
- stabilire la banda di frequenza entro cui desideriamo avere Verificare in simulazione che la presenza del filtro non porti la tensione al di sotto o in prossimità dei minimi di specifica del dispositivo alimentato, in nessuna condizione operativa;
- verificare in simulazione che eventuali antirisonanze non violino il valore di impedenza Target per alcuna frequenza nel range operativo. Aggiungere un condensatore di decoupling qualora si presentino violazioni ed aggiustarne il valore in simulazione (vedi 2 per maggiori dettagli sull’antirisonanza);
- verificare in simulazione la risposta a transiente del circuito di alimentazione con filtro, per verificare l’assenza di overshoot ed oscillazioni che possano violare i limiti raccomandati imposti dai componenti alimentati;
- verificare in simulazione l’impedenza di trasferimento dell’isola di alimentazione a valle del filtro rispetto ad altri rami del sistema di alimentazione per decidere se l’attenuazione ottenuta sia soddisfacente.
L’applicazione delle ferriti risulta, in generale, conveniente quando si debbano isolare circuiti analogici sensibili al rumore in una applicazione mista, con circuiteria analogica e digitale aventi sensibilità diverse. Le ferriti che abbiamo considerato finora sono bipoli, componenti montati in serie ad un singolo conduttore. Esistono anche nuclei in ferrite ad anello, montati in modo da avvolgere strettamente entrambi i conduttori di alimentazione di un circuito o apparecchiatura. Le correnti fluenti nei due conduttori sono uguali in modulo ed opposte in fase. Il campo risultante è quindi nullo all’interno della ferrite e questa non presenta alcuna attenuazione. La presenza di correnti di modo comune crea però un campo risultante diverso da zero e dissipazione nella ferrite. Questa si presenta quindi come una impedenza serie bassissima per le correnti funzionali dell’apparecchiatura, ma come impedenza significativa che dissipa in calore l’energia associata a correnti di disturbo sovraimposto. Sono questi i rigonfiamenti che notiamo ad esempio sui cavi di alimentazione dei moderni monitor da computer.
