è la categoria relativa all’elettronica embedded. Troverete articoli relativi ai sistemi embedded sia lato hardware che software con particolare riferimento appunto a tutti quei sistemi rivolti ad una specifica applicazione. Tratteremo anche Linux embedded ed altri sistemi operativi leggeri in grado di “girare” su schede embedded a microcontrollore.
Freescale, dopo l'annuncio diramato lo scorso gennaio, ha recentemente dato una dimostrazione pratica delle potenzialità offerte dai processori della nuova famiglia i.MX6, basati su un'architettura scalare multicore e con prestazioni di assoluto rilievo.
Web HVAC per Kirin3 Freescale - Progetto Open Source da Freescale. Il firmware standard spedito con l'M52259DEMOKIT e l'M52259EVB da Freescale è il web HVAC, che permette agli utenti di visualizzare e controllare HVAC attraverso un browser web standard. Il web server utilizza un IP di default 169.254.3.3 ed assegna IP per i PC collegati sulla rete 169.254.3.x attraverso cavo Ethernet cross-over.
STMicroelectronics ha allargato la famiglia di prodotti STM32 introducendo una nuova serie di microcontrollori: la STM32 connectivity line, che include i nuovi dispositivi STM32F105 e STM32F107, entrambi basati sul processore a 32-bit ARM Cortex-M3.
In questo articolo proviamo a far "girare" la nostra prima, semplice applicazione sulla scheda Linux PortuxG20. Ci serviremo di alcuni strumenti di connettività tipici del mondo Linux, quali: un client ssh, il servizio nfs e molto altro. Inizieremo ad esplorare le tante funzionalità che tale prodotto ci offre.
L'LT3652 è un rivoluzionario caricabatterie buck monolitico a celle solari che supporta le strutture chimiche delle batterie moderne. L'LT3652 integra un circuito di regolazione della tensione di ingresso che controlla la corrente di carica della batteria. Se l'LT3652 viene collegato ad un pannello solare, il circuito di regolazione della tensione di ingresso aggiusta costantemente il pannello sul picco di corrente in uscita.
In questo articolo continuiamo l'analisi della stringa acquisita dal SAD iniziata negli articoli precedenti. In questo caso ci proponiamo di memorizzazione in RAM i risultati finali ottenuti a posteriori dell’elaborazione effettuata
Per dare la parola ad un progetto elettronico, da qualche tempo si trova sul mercato un modulo audio con slot MicroSD integrato con il quale realizzare in modo semplice un player comandato da pulsanti o comandato via seriale, ad esempio con un PIC o con Arduino.
Semplice programmatore seriale per microcontrollori AVR della Atmel. Il programmatore si collega alla porta seriale RS232 del PC ed è compatibile con i software di programmazione PonyProg e Avrdude.
Negli articoli precedenti abbiamo visto come è stato possibile realizzare il circuito vero e proprio del sistema di acquisizioni dati per il sensore ottico lineare ELIS-1024 nonchè la gestione dei segnali di controllo.
Adesso vediamo in questo articolo come è stata elaborata la stringa di bit acquisita mediante le tecniche illustrate precedentemente.
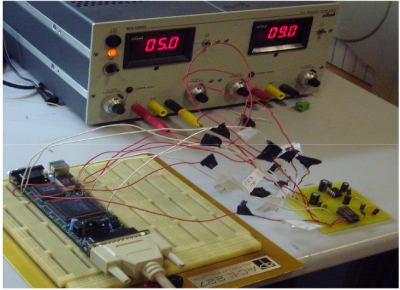
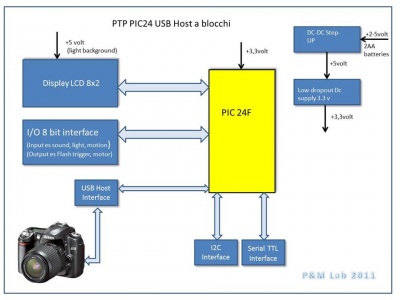
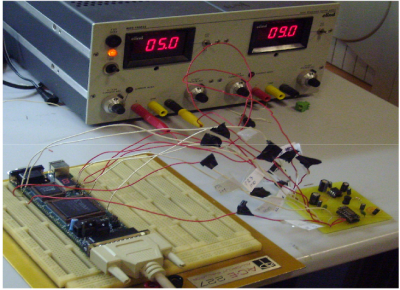
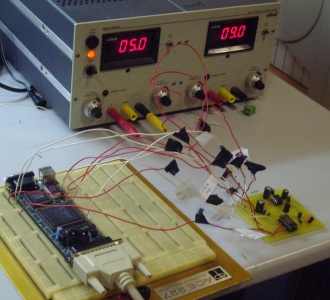
Ora con un processore PIC (famiglia 24 o 32 della Microchip) si può controllare una fotocamera che eseguirà in automatico molti comandi con un sistema basato su un microcontroller della Microchip dotato di funzioni di USB Host/OTG embedded.
Seconda parte: descrizione del prototipo e blocchi funzionali.
Controllare una fotocamera digitale tramite porta USB, ora con un processore PIC, (famiglia 24 o 32 della Microchip) si può. La fotocamera eseguirà in automatico molti comandi con un sistema basato su un microcontroller della Microchip con funzioni di USB Host/OTG. Da molto tempo le moderne fotocamere digitali possono utilizzare la porta USB non solo per trasferire immagini al PC (USB Mass Storage) , ma anche per ricevere specifici comandi di controllo che ne controllano alcune funzioni (USB PTP).
Prima parte: descrizione del protocollo PTP.
Ora che siamo a conoscenza dei passaggi da eseguire per realizzare la crittografia (articolo "Algoritmo di crittografia RollingCode"), non ci rimane che approfondire il funzionamento della Encryption Routine che è il cuore di tutta la procedura di crittografia. Grazie a questa routine infatti vengono generati i codici che corrispondono alle informazioni crittografate.
Il controllo di carica e scarica delle batterie delle apparecchiature portatili è sempre stato un problema ritenuto importante dai progettisti per il buon funzionamento degli apparati e per garantire una adeguata durate delle batterie stesse.
La MAXIM ha messo in commercio due componenti interessanti ad alta integrazione che risolvono egregiamente tali problematiche.
Oggi le 3Domande sono per Pino Cosenza, Managing Director di Rutronik, azienda tedesca leader, a livello mondiale, nella distribuzione di componenti elettronici e semi assemblati.
In questo articolo proseguiamo l'analisi dei segnali di controllo generati al fine di realizzare il sistema di acquisizione dati oggetto di questa tesi: in particolare vedremo un modo semplice di realizzare un convertitore seriale/parallelo attraverso il tool Project Manager 2.1 fornito dalla Xilinx
Nei prossimi articoli sarà presentato lo schema di controllo ed elaborazione da
implementare attraverso l’FPGA, e realizzato mediante il software Project Manager.
Verranno analizzate nel dettaglio tutte le operazioni realizzate e che compongono
le varie fasi di progetto che elenchiamo di seguito.
ARM Developer Studio 5 (DS-5), la più recente versione della toolchain di sviluppo per i processori della famiglia ARM, aggiunge importanti funzionalità per supportare lo sviluppo di applicazioni e device driver sotto Linux.
In questo articolo vedremo cosa occorre per iniziare a sviluppare un'applicazione con la scheda Linux Embedded PortuxG20. Partendo dal presupposto di essere già in possesso di uno Starter Kit, inizieremo con qualche semplice test, con la configurazione del sistema di sviluppo e poi, insieme, esploreremo le principali funzionalità del prodotto, con esempi pratici e codice da implementare. Non sarà un solo articolo, ma divideremo in più post la descrizione di un prodotto che mostra grandi potenzialità e ...qualche inevitabile complessità.
Si può avere una radio che cambi istantaneamente! Immaginate che state ricevendo la banda della Protezione Civile e che si può passare immediatamente alla banda di trasmissione! Questo è SDR! E se una radio potesse avvertire uno spettro non utilizzato e interferire nella comunicazione radio?! Questo sarebbe RC o la radio cognitiva
AVRcoder è uno strumento per tutti coloro che hanno appena iniziato il viaggio verso il mondo dei microcontroller 8-bit AVR.