
Ora con un processore PIC (famiglia 24 o 32 della Microchip) si può controllare una fotocamera che eseguirà in automatico molti comandi con un sistema basato su un microcontroller della Microchip dotato di funzioni di USB Host/OTG embedded.
Seconda parte: descrizione del prototipo e blocchi funzionali.
Riprendiamo ora con la descrizione del prototipo partendo dai suoi blocchi funzionali. Per poter lavorare in campo il sistema deve essere alimentato a batterie e consumare poco. Dalle prime verifiche tutto il sistema consuma circa 90mA con picchi di 110mA quando e’ attiva la retroilluminazione del display LCD (temporizzata e controllata direttamente da un pin di output del microcontroller).
Vediamo ora nel dettaglio i singoli blocchi funzionali:

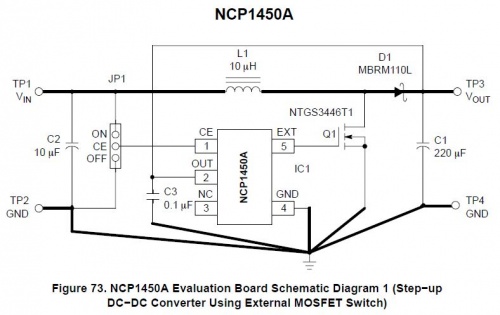
Il primo blocco è costituito da un circuito PWM Step–UP DC-DC converter (NCP1450) che con 2 batterie AA porta la tensione a 5 Volts, con circa 800mA max di carico. Il chip e’ stato scelto perche’ risulta abbastanza efficiente (88% max) e puo’ lavorare con tensioni in ingresso da 1,5 a 4,2 Volts. Benchè la CPU utilizzata e anche il display Lcd (inclusa la retroilluminazione) lavorino a 3,3 Volts, la tensione a 5 Volts si rende necessaria per le funzioni USB Host e per alimentare sensori o circuiti esterni.
Riporto lo schema base del chip che abbiamo impiegato nel prototipo.
Il secondo blocco e’ rappresentato da un classico regolatore low dropout (Reg1117) che riduce la tensione a 3,3 Volts.
In alto a destra abbiamo i tre pulsanti che realizzano la funzione di navigazione e scelta nel menu che compare sul display LCD 8x2 (connettore a doppia fila a sinistra, con annesso trimmer di regolazione contrasto).
Al centro del PCB abbiamo il processore PIC24FJ256GB106 che ha come oscillatore un quarzo a 20MHz e il clock interno configurato in PLL a 72MHz. Per la programmazione e’ stata predisposta una porta ICSP (in basso a sinistra), come programmatore/debugger utilizziamo i Pickit2 e 3 della Microchip con sw MPLAB.
A destra troviamo la porta USB in configurazione Host e in basso, in posizione centrale, due file di connettori per l’espansione I/O e la eventuale comunicazione con sensori/dispositivi I2C o in seriale (con gli opportuni traslatori di livello esterni) .
Il prototipo avendo molte potenzialita’ (il chip e’ tra i più potenti e completi della famiglia PIC24F con 16Mips di potenza, molta memoria e 64 pin) puo’ essere impiegato non solo per lo scopo per cui e’ nato, ma anche come tool di sviluppo, e’ infatti sufficiente utilizzare la porta di espansione per collegarvi tensioni analogiche da misurare o uscite per attivare motori in PWM etc.
Nonostante alcune perplessita’ iniziali, si e’ scelto di realizzare tutto o quasi il PCB in tecnologia SMD. I dubbi consistevano nella riuscita del montaggio di un prototipo in SMD non avendo di fatto alcuna esperienza precedente in questa tecnica, e ancor di piu’ senza mezzi tecnologici in quanto questo e’ per noi un hobby. Di fatto il problema e’ stato brillantemente superato e, in pochi minuti, con la tecnologia del fornello elettrico a circa 210°C e la miracolosa pasta saldante che rende tutto molto semplice, dal montaggio dei componenti in formato 0805 fino al processore TQFP a 64 pin.Gli eventuali corti tra pin del chip in fase di cottura sono stati rimossi con flussante e trecciola dissaldante ed il tutto successivamente verificato con il tester.
Fasi di assemblaggio
Il prototipo gia’ saldato e in fase di assemblaggio, pronto per le prime verifiche funzionali (alimentazioni,pulsanti, display etc)

Il prototipo inscatolato e pronto per i primi test in campo.

Per la comunicazione con i sensori esterni si e’ adottato al momento un connettore DB9F che porta all’esterno l’alimentazione a 5 Volts e alcuni pin di I/O.
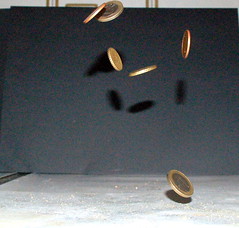
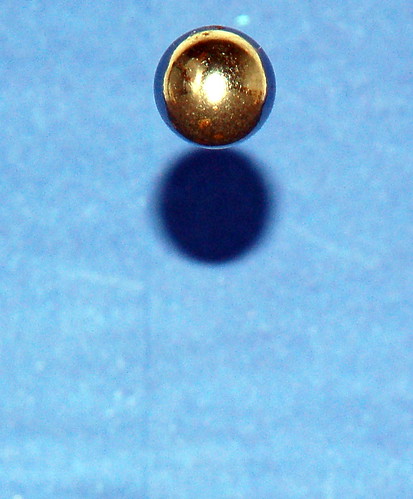
Nell'immagine il test di scatto della fotocamera quando il sensore rileva l'interruzione del raggio laser.
Setup basato su una penna laser (a sinistra) e una LDR (a destra) con annesso circuito a trigger di schmitt (con un 74hc14)

Di seguito alcuni test sul campo per dare l'idea delle potenzialità con l'integrazione di sensori che captano il suono o la luce:


Sound Trigger test Laser Beam Detector
Alcuni test effettuati con sensori che rilevano il suono o l'interruzione di un fascio laser


Link ad altri test effettuati con il prototipo:
Link sulla fotografia ad alta velocità

Ciao telegiangi, bellissimo questo progettino :)…
Vediamo se ho capito come funzion: la fotocamera si attiva quando l’oggetto da fotografare attraversa il laser? oppure quando fa rumore?
secondo me è davvero fantastica come idea… ma secondo te potrebbe funzionare anche a grandi distanze?
ad esempio se i due laser li metto a una decina di metri di distanza, allineati e in mezzo ci faccio passare qualcosa di molto piccolo..tipo una sfera..
fino a che velocità riesci a catturarla?
ciao e grazie!
Però, come schedina c’è da dire che è veramente interessante.
Se ne vedono tante in giro ma nessuna che abbia già integrato uno schermo LCD o che possa funzionare da subito a batterie.
Hai ragione,è una schedina di sviluppo che ha però ha tutte le caratteristiche per essere utilizzata come scheda finale per vari progetti, non solo per il controllo di una macchinetta Fotografica.
Complimenti per il prototipo in SMD saldato a mano, sinceramente non avrei mai immaginato che si potesse usare un forno elettrico per questi scopi!
A prima vista, ho pensato che un applicazione sensibile ai consumi non dovrebbe avere l’oscillatore generato dal PLL ma basarsi unicamente sul quarzo.
Ma poi, riflettendoci, l’incremento di velocità del quarzo, porterebbe comunque ad un maggior consumo. Incremento che sarebbe comunque necessario per far funzionare l’usb.
Avete fatto una valutazione, ai fini di una riduzione degli assorbimenti,
sul possibile utilizzo di un quarzo a 48MHz con il PLL disabilitato?
@divivoma, in linea teorica il laser (a seconda della potenza) puo’ raggiungere una distanza di 10 mt e piu’ mantenendo un fascio sufficentemente ristretto. Per i test ho effettuato prove sia con un modulo di potenza da 1 mW che da 5 mW, essendo dotati di lente frontale il fascio può essere regolato a piacere. Per la velocita’ di reazione non abbiamo ancora fatto delle misurazioni precise (dovremmo attrezzarci), ma dai primi risultati fotografici ottenuti sin qui possiamo ritenerci gia’ molto soddisfatti.
Tempi di reazione da vero High Speed si possono ottenere solo lasciando aperto l’otturatore (controllato sempre dalla scheda) in una stanza buia, agendo solo con il circuito trigger suono o luce su un flash a media potenza che scatti all’istante giusto. Questa sara’ la fase 2 del progetto che prevede la gestione integrata della fotocamera, dei sensori e del o dei flash attraverso cavetti PC o anche, forse un lampo pilota.
@Emanuele, sui consumi stiamo verificando se possiamo ottimizzare ancora, in effetti per lo scopo principale non ci occorre un system clock molto spinto (ora a 32Mhz ma il tutto potrebbe tranquillamente girare anche a 4 o 8 Mhz), la soluzione del clock interno rischia di dare instabilità alle temporizzazioni con il device USB.
Non avevo pensato ad aumentare la frequenza del quarzo disabilitando al tempo stesso il PLL. Ti ringrazio per questo suggerimento, che proveremo quanto prima.
Inizialmente abbiamo utilizzato la compatta Canon A300 per i test di comunicazione in protocollo Ptp. Come dice giustamente Fabrizio87 per ottenere tempi di scatto rapidi é necessario mettere la fotocamera in manuale. Per i test presentati abbiamo utilizzato una Nikon D50 impostata manualmente sia per fuoco che tempi di esposizione e potenza del flash. Per quanto riguarda la potenza dei laser credo ci sia una normativa che ne impedisce l’impiego all’aperto oltre i 10 mW, ma con uno da 5 mW si ottiene gia una discreta distanza, senza rischio per cose e persone. Per fare un esempio il modello che sto usando é rosso e puó arrivare fino a 600 mt. http://www.robotstore.it/product/137/Puntatore-Laser-5mW-650nm-Rosso-in-metallo-classe-IIIA.html
Per cosa riguarda la distanza non ci sono problemi,
è sufficiente utilizzare un puntatore laser molto più potente, ad esempio si trovano facilmente qui laser verdi 250 mW che per esperienza personale percorrono facilmente diversi kilometri.
ho provato con uno che proveniva dalla Cina, le distanze più lontano che sono riuscito è di 2.3 Km e dall’altra parte si vedeva un punto verde di soli 5 cm di diametro su un muro bianco.
Per cosa riguarda la velocità della macchina fotografica dipende cosa usi,
la mia macchina fotografica che una Canon 600 riesce tranquillamente a fare cinque fotogrammi al secondo in risoluzione massima 18 Mpilx, dopo essenziale considerare anche il fatto che è necessario disattivare l’autofocus così da avere un tempo di ritardo di qualche decine di millisecondi, al momento che viene chiuso in contatto e la foto viene effettuata realmente.
Dopo nel caso dell’articolo non essendo una macchina reflex è difficile ottenere questi risultati.
In realtà è perfettamente ragione questa la normativa italiana vigente
L’ordinanza 16 luglio 1998 pubblicata nella Gazzetta Ufficiale n. 167 del 20 luglio 1998 vieta, su tutto il territorio nazionale, la commercializzazione di puntatori laser o di oggetti con funzione di puntatori laser di classe pari o superiore a (>1mW).
Nella realtà dei fatti è facile procurarsi laser che vanno fino 1W
È è sufficiente pensare a tutte quelle bancarelle anche nei mercati dove si possono acquistare qui laser verdi che vanno di moda questi hanno una potenza tra 250 mW e 500 mW.