è la categoria dove si trovano articoli di ingegneria robotica ma anche semplici guide su come realizzare un robot. L’elettronica applicata alla meccanica, quindi robotica educative e robotica industriale. Potrete inoltre leggere articoli anche sui droni radiocomandati. Dai più semplici per hobbisti, ai droni per riprese aeree ed a quelli professionali.
La workstation Buggy della Mikroelektronika è una piattaforma di sviluppo Clicker 2 o Mikromedia a quattro ruote, alimentata a batteria e con molte opzioni per equipaggiare il sistema con varie funzionalità aggiuntive. E' possibile usarla in ambito robotico per costruire un semplice robot, passando per diverse implementazioni nel settore automotive. Il sistema può ospitare un buon numero di board Click, con la possibilità di utilizzare una varietà di sensori e moduli di comunicazione. Una app Android gratuitamente scaricabile viene in aiuto per il controllo del Buggy attraverso BLE P click, un modulo Bluetooth Low Energy per la comunicazione dati. …
Il kit mBot è una combinazione di elettronica, programmazione e robotica che offre una soluzione open source perfettamente integrata sia a livello didattico per chi vuole conoscere il mondo della robotica, sia a livello tecnico con la possibilità di sperimentare e creare nuove soluzioni. Tutto quello che c'è da sapere relativamente alla scienza, tecnologia, ingegneria e matematica, è fornito dal kit mBot che attraverso le sue infinite possibilità di programmazione permette di assemblare i progetti con spirito scientifico e nello stesso tempo con un pizzico di divertimento. Introduzione La soluzione che fa per Voi, un kit per costruire ed …
Fino a qualche anno fa l’idea di controllare un robot o una protesi con il pensiero sembrava appartenere solo ai film di fantascienza. Oggi invece la possibilità di utilizzare i segnali provenienti dall’attività cerebrale per comandare strumentazioni esterne è diventata realtà. La ricerca nel campo delle interfacce neurali (in inglese Brain-Computer Interfaces, BCI) ha ottenuto negli ultimi anni risultati sorprendenti. Sono ormai molte le università e le aziende sparse in tutto il mondo che elaborano prototipi e software (anche open source) destinati alle applicazioni più disparate: dai videogames, alle neuroprotesi sostitutive per arti amputati, alle strumentazioni militari. Cerchiamo quindi …
Il Kit NIBO Burger è un robot liberamente programmabile attraverso l'utilizzo di sensori IR e il controller ATmega16 AVR. Il kit funziona in stand alone per mezzo di batterie opportunamente ricaricabili attraverso la porta USB. Nel progetto è integrato (sul lato superiore della scheda) uno slot per le Shield Arduino, quali moduli transceiver e gps. Il sistema kit contiene 7 sensori brick collegati nei rispettivi slot, di cui 3 per la rilevazione di differenti colori e 4 per la rilevazione di oggetti per mezzo della tecnica ad infrarossi. Il sistema prevede due versioni di assemblaggio in base al rapporto …
I droni, come già detto in precedenza, stanno apportando una vera e propria rivoluzione in moltissimi ambiti lavorativi. La tecnologia dronotica ha portato nel giro di pochi anni nuove professioni che permettono notevoli benefici a tutela della sicurezza. Ci sono delle professioni tecniche nelle quali la scala di importanza del know how è velocemente cambiata e saper pilotare un drone (e poterlo legalmente fare), è una delle principali carte vincenti, praticamente ormai indispensabile nel settore edilizio, nel campo dei rilievi e delle mappature. Tra le componenti più importanti a bordo, oltre ai motori, troviamo la centralina di controllo, che …
Negli ultimi due anni c'è stato un gran parlare di droni su giornali e testate nazionali, blog, siti web e dibattiti televisivi. Per molte persone si tratta ancora di semplici (si fa per dire) oggetti volanti radiocomandati spesso circondati da nuvole di dibattito molto fumoso in merito alla privacy, al livello di pericolosità e altri dubbi da parte dell'opinione pubblica. Ma che cosa sono davvero questi oggetti che dal campo militare sono passati all'uso civile, portando una vera e propria rivoluzione in una miriade di professioni ? Sono davvero così pericolosi e controversi? Quali sono i risvolti positivi del loro utilizzo, come …
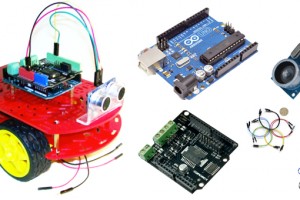
La tecnologia presente sul mercato ci permette di realizzare un Robot con strumenti decisamente alla portata di tutti. Il kit Robot Beginner KIT V2 permette di realizzare il proprio Robot combinando una serie di moduli, in particolare l'Arduino UNO Rev 3 e il corrispondente Shield per il controllo motore. Particolarmente interessante è l'impiego del modulo agli ultrasuoni con esempi di codice sketch per controllare i movimenti del robot. Attraverso istruzioni molto dettagliate è possibile montare, programmare e collaudare il Robot, scoprendo nello stesso tempo la scienza della robotica in maniera del tutto semplice. Il kit viene montato in un …
Ammettetelo: chi, almeno una volta nella vita, non ha desiderato possedere un robot in grado di portargli una lattina di birra e stappargliela? Bene, grazie a Berrino i vostri problemi sono finiti! Infatti, d'ora in poi, potrete essere finalmente un tutt'uno con il vostro divano, senza però dover rinunciare a quel dolce nettare che vi disseta durante gli "intensi" pomeriggi domenicali! Presentazione In questo articolo, andrò a descrivere come è stato realizzato il mio progetto del robot porta-birra. Esso sarà in grado di riconoscere un determinato input vocale, procedere fino al punto stabilito, stappare la lattina di birra e porgerla all'utente. Per …
Sul sito Elettronica Open Source, ho già presentato alcuni modelli di robot comandati in remoto, come LittleBot che è comandato tramite Bluetooth , o un altro modello che era comandato tramite un telecomando ad infrarossi L’opportunità data dal contest 20 Arduino Motor Shield di Infineon gratis per voi, ha portato all’idea di realizzare un nuovo modello di rover comandato in remoto utilizzando il sistema Wi-Fi. Per il controllo si è utilizzata una scheda Arduino Yún che è la combinazione di un classico Arduino Leonardo (basato sul processore ATMEGA32U4) con un sistema-one-chip Wi-Fi in cui viene eseguito Linino (un MIPS GNU …
Il 23 e il 24 maggio si svolgerà Officine Robotiche, l’incontro annuale gratuito rivolto agli amanti della robotica, professionisti, neofiti e curiosi. Quest'anno parteciperemo all'evento anche noi di Elettronica Open Source, quindi se siete appassionati di robotica e volete conoscerci di persona questa potrebbe essere una buona occasione. Scopriamo nell'articolo il programma dell'evento, gli orari e la sede di svolgimento. Officine Robotiche è un gruppo di persone, provenienti da tutta Italia, amanti della robotica, il cui interesse è quello di condividere e diffondere le conoscenze in questo ambito. Questo quindi è lo spirito dal quale nasce l'evento dedicato alla …
Concludiamo questa serie di articoli sulla realizzazione del RinoBOT. Dopo la "Costruzione del RinoBot: scheda navigazione e controllo" e "Costruzione del RinoBot: il software", in questo articolo si descrive la scheda che, simulando i sensi umani, permette la navigazione in un campo sconosciuto evitando gli ostacoli e trovando alcuni obiettivi specifici. Nei miei precedenti articoli di questa serie "costruire un robot", ho spiegato come costruire le parti essenziali di "Rino Il robottino", la piattaforma meccanica, l'hardware e il software necessari per guidare il robot alla velocità desiderata, in una certa direzione, sapendo dov’è in ogni momento relativamente ad un …
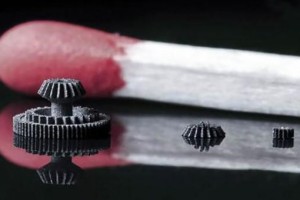
La stampa 3D permette di realizzare oggetti sempre più vari e funzionali, personalizzandoli a piacimento e sperimentando nuove combinazioni di forme e materiali. Ma la manipolazione digitale della materia si sta avvicinando progressivamente al livello molecolare e questo apre nuove prospettive di utilizzo. Allo stesso tempo questa “discesa” nel mondo microscopico è seguita anche dalla robotica, con attuatori miniaturizzati in grado di svolgere compiti complessi ben al di là della nostra vista. È possibile unire i due ambiti? La risposta è sì, e grazie a questa sinergia una nuova medicina è pronta a far la sua comparsa sulla scena …
È possibile connettere cervello e computer? Da un lato materia organica altamente organizzata e complessa, dall'altro architetture e circuiti in silicio. Lo scambio di informazioni tra questi due mondi però è possibile, perché entrambi parlano una lingua simile codificata in segnali elettrici in grado di elaborare input esterni e generare risposte adeguate in uscita. Grazie ad appositi dispositivi detti BCI, ossia interfacce cervello-computer (Brain Computer Interface) in grado di associare i segnali dell'uno e dell'altro, cervello e computer possono comunicare e influenzarsi a vicenda. Una volta collegati, le potenzialità interessano praticamente ogni campo, dalla ricerca accademica sulle disfunzioni cerebrali …
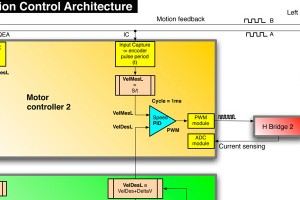
Proseguiamo il tutorial sulla realizzazione del RinoBOT, iniziata con l'articolo precedente: Costruzione del RinoBot: scheda navigazione e controllo. In questo articolo si descrive la fase di sviluppo del software per il progetto. In particolare il PID (Proportional Integral Derivative, per il controllo motori e la navigazione) e l'Odometria. Nella prima parte di questa serie di articoli, ho descritto come costruire una piattaforma robotica con i controllori Microchip Technology dsPIC. Ora mi limiterò a descrivere il software caricato sulla scheda che gestisce la velocità delle ruote, il controllo a circuito chiuso con un algoritmo PID, il dead-reckoning tramite odometria (sia …
In questa serie di articoli viene presentata la realizzazione completa del RinoBOT, un robot in grado di muoversi autonomamente ed interagire con l'ambiente. In particolare in questo articolo si descrive la scheda di controllo che governa il robot azionando i motori tramite ponti ad H e il sistema di comunicazione per il telecontrollo del robot stesso. Sin dai primi tempi della mia "infanzia elettronica" ho sognato di costruire un robot autonomo. Ma, allora, un simile progetto era troppo difficile e costoso. Ora è pienamente possibile. Avendo a disposizione hardware potente e poco costoso e, soprattutto, un sistema di sviluppo …
Spesso sulle nostre pagine hanno trovato spazio soluzioni auto costruite come robot oppure droni. Ma come si arriva ad un risultato di questo tipo? Come si può creare una struttura robotica completamente autosufficiente in grado, per esempio, di orientarsi nello spazio, di evitare la collisione con oggetti e così di riequilibrare il suo assetto oppure di individuare con precisione la sua posizione? Ecco alcune soluzioni che vi saranno davvero molto utili se vorrete rendere il vostro robot perfettamente funzionante. Buona lettura. Per poter fare navigazione c'è bisogno di indicazioni precise ma anche di strumenti adeguati. Quando a dover navigare …
Internet è una immensa fonte di dati in continua espansione con la quale siamo ormai abituati ad interagire per recuperare ciò che ci serve, senza perderci in questa enorme mole di informazioni, grazie all’utilizzo dei motori di ricerca. Ma come fanno questi ultimi ad aggiornare e recuperare le informazioni del web? Questo avviene perché la rete è continuamente setacciata da “ragni” che ne catturano i contenuti (ovvero i siti web ed i dati ivi compresi) e li inseriscono in un indice. Proviamo a realizzare uno di questi spider per catturare contenuti a carattere legale e scaricarli in locale.
Vi piacerebbe realizzare un progetto al 100% con le vostre mani, senza la necessità di essere ingegneri o geni e al tempo stesso, mostrare il vostro capolavoro agli amici sapendogli spiegare anche il funzionamento? Se le risposte sono si allora con questa guida potete realizzare tutto ció, con una spesa abbastanza contenuta. Sono uno studente liceale con la passione per l'informatica, l'elettronica e la meccanica ed ho deciso di condividerla realizzando questa guida.
Molti lettori sapranno che dal 16 gennaio 2014 è in vendita, presso le edicole, l'opera ROBI edita dalla DeAgostini, la cui vendita on-line, invece, era già iniziata l'11 novembre 2013. Venduta a fascicoli, permette la costruzione di un piccolo robot umanoide alto 34 cm, i movimenti del corpo sono dati da 20 servomotori digitali, mentre una scheda di riconoscimento vocale, gli permette di comprendere dei comandi e rispondere a tono in lingua italiana.
Il robot non dispone, però, di sensori quali: temperatura, luminosità, controllo del consumo della batteria, una possibilità era di realizzare un piccolo modulo da inserire all'interno del …
Nei precedenti articoli è stata affrontata la costruzione della scheda di controllo e l’assemblaggio del telaio del robot LittleBot, che è possibile comandare tramite l’utilizzo di uno smartphone su cui è stata caricata una speciale APP.
Questo articolo illustrerà come comandare il robot utilizzando la Scheda Arduino Esplora equipaggiandola con un modulo Bluetooth, dotandola di una batteria che la renderà autonoma e si farà riferimento a quanto appreso in alcuni articoli già pubblicati su Elettronica Open Source.
Per migliorare l’affidabilità della stazione di controllo, rispetto a quanto in precedenza pubblicato, il modulo di alimentazione è ora rappresentato da un’unica scheda che …













.jpg)