Ecco finalmente online il prima aticolo della serie che porterà alla realizzazione di un fantastico Robot Rover basato su due piattaforme di sviluppo ormai molto conosciute ed apprezzate: Arduino e Raspberry Pi. L'idea è scaturita dalla mia passione per l'elettronica e probabilmente... per la robotica. Questo robot potrà essere realizzato, programmato e personalizzato da tutti coloro che pensano che il mondo potrebbe essere migliore con l'Open Source. In questo primo articolo voglio mostrare un aspetto interessante e fondamentale tramite il quale può essere realizzato il robot: Come far fare amicizia al Raspberry Pi ed Arduino!
Per giungere allo scopo finale ho immaginato che Arduino dovrà occupparsi di muovere il robot mentre il magnifico ed unico mini computer Raspberry Pi avrà il privilegio di comandare, infatti il suo compito sarà quello di inviare ad Arduino le istruzioni da eseguire, elaborare i dati rilevati dai sensori, gestire la visualizzazione del video, ricevere dalla rete (con relativa interfaccia web e/o applicazione specifica per cellulare) le istruzioni da eseguire, ed inviare sulla rete i valori letti dei sensori ed il video.
In questo articolo voglio mostrare a tutta la Community come è possibile far fare amicizia ad Arduino e Raspberry Pi... facendoli parlare tra di loro!
PREMESSA: Sono semplicemente un appassionato, un sognatore... un ragazzo a cui piacerebbe fare tanto ma ancora può fare ben poco. Per mandare avanti la realizzazione di questo progetto avrò bisogno dell'aiuto di tutta la community, perciò... Abbiate un po di pazienza.
Arduino e Raspberry Pi devono poter comunicare tra loro e la migliore soluzione credo che sia quella di utilizzare una comunicazione I2C. I circuiti base principali che abbiamo bisogno di utilizzare per realizzare questo robot sono:
- Controllo dei motori - Tramite l’l298 che è un Compatto Hbridge duale per pilotare fino a 2 motori DC da 2A
- Rilevatore di temperatura - tramite il sensore di temperatura DHT11
- Rilevatore di distanza - tramite un sensore ad ultrasuoni
- Rilevatore di luminosità - tramite una fotocellula
- Circuito di accensione per luci - tramite un semplice circuito basato sul transistor BC557
- Circuito di accensione per ventola - tramite un semplice circuito basasto sul transistor BC557
Dopo questa breve introduzione, voglio presentare il primo articolo della serie: Come costruire un Robot con Raspberry Pi ed Arduino
Come far comunicare Arduino e Raspberry Pi.
Naturalmente, come ho già detto, le due board hanno bisogno di comunicare tra di loro per effettuare le operazioni che faranno funzionare il robot, e le principali sono:
- Muovere il Robot in 4 direzioni
- Vedere la zona anteriore del Robot
- Accendere le luci nel caso in cui ci sia buio
- Integrare un sistema di automatizzazione per inserire il robot in un sistema di sorveglianza ed allarme
E’ possibile effettuare questo collegamento in diversi modi, tra cui principalmente:
- Tramite la porta USB
- Tramite UART
- Tramite Wireless - Wifi, Bluetooth, Zigbee, …
- Tramite I2C
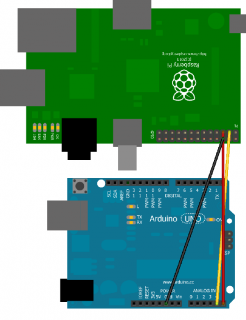
Il collegamento che ci sarà tra Arduino e Raspberry Pi è molto breve, e quindi è molto semplice effettuare il collegamento tramite I2C, in quanto il mini computer ha sulla board 2 pin I2C tra le GPIO che possono essere collegati tramite 2 fili a due entrate analogiche di Arduino, più in particolare il pin A4 (SDA) e A5 (SCL). E’ scontato il fatto che deve essere collegata anche la massa.
Inoltre, come sicuramente si potrà vedere nel prossimo articolo, l’atmega328 sarà inserito su una board da me progettata per effettuare con facilità i collegamenti tra i sensori, l’alimentazione, e le 2 schede. Sarà una board monolayer progettata interamente da me e quindi sicuramente non sarà perfetta, ma almeno l'ho realizzata con Passione dedicandogli del tempo.
Raspberry Pi ha solo due porte USB, che verranno utilizzate per connettere una webcam e la chiavetta Wifi.
Come funziona questo collegamento?
Inizialmente ero quasi sicuro di aver bisogno di un convertitore di livello perchè Raspberry Pi lavora a 3,3V ed Arduino a 5V, ma dopo aver studiato il tipo di connessione che voglio effettuare, ho appreso che se il mini computer viene utilizzato come Master ed Arduino come slave non c’è ne di bisogno perchè Arduino non ha resistenze di pull-up installate.
Sul Raspberry Pi utilizzando Raspian bisogna effettuare alcuni passaggi che permettano di sbloccare l’utilizzo dell’ I2C, in quanto nonostante nell’ultima versione siano presenti i driver, di default è disabilitato.
Per prima cosa bisogna rimuovere l’I2C dalla blacklist digitando sul Raspberry Pi:
$ cat /etc/modprobe.d/raspi-blacklist.conf blacklist spi-bcm2708
Dopodichè bisogna aggiungere una riga alla fine del file /etc/modules, digitando:
sudo nano /etc/modules
Si aprirà l’editor testuale di Linux. Bisogna posizionarsi alla fine del codice ed aggiungere questa riga:
i2c-dev
Salviamo premendo CTRL+X e Y Adesso bisogna installare il Tool I2C digitando:
sudo apt-get install i2c-tools
Ci siamo quasi... Adesso se l’utente che vorremo utilizzare è “pi”, dobbiamo dargli i permessi necessari digitando:
sudo adduser pi i2c
Perfetto! Adesso bisogna riavviare Raspberry. Se si vuole effettuare un Test si può provare a vedere i dispositivi I2C digitando:
ll /dev/i2c*
Invece se si vuole scansionare il bus I2C bisogna digitare:
i2cdetect-y 1
Bisogna installare il supporto I2C per Python (Documentazione, Quick2wire).
Adesso passiamo ad Arduino. Un semplice esperimento che può essere effettuato per testare il collegamento I2C tra arduino e Raspberry Pi. Configurare Arduino come slave. Tramite l’I2C Arduino riceve una cifra, la riconosce e se la cifra è ='1’ viene acceso un led. Ecco lo sketch per Arduino:
#include#define SLAVE_ADDRESS 0x04 int number = 0; int state = 0; void setup() { pinMode(13, OUTPUT); Serial.begin(9600); // avvia la seriale per l’output // inizializzazione I2C Wire.begin(SLAVE_ADDRESS); // definizione callbacks per la comunicazioneI2C Wire.onReceive(receiveData); Wire.onRequest(sendData); Serial.println("Ready!"); } void loop() { delay(100); } // callback for received data void receiveData(int byteCount){ while(Wire.available()) { number = Wire.read(); Serial.print("data received: "); Serial.println(number); if (number == 1){ if (state == 0){ digitalWrite(13, HIGH); // set the LED on state = 1; } else{ digitalWrite(13, LOW); // set the LED off state = 0; } } } } // callback for sending data void sendData(){ Wire.write(number); }
Adesso ecco di seguito un codice in Python per il raspberry Pi che funziona così: il Raspberry Pi chiede di inserire una cifra e la invia ad Arduino, Arduino riconosce i dati ricevuti e li rinvia da dove li ha ricevuti:
import smbus
import time
# per RPI version 1, utilizza "bus = smbus.SMBus(0)"
bus = smbus.SMBus(1)
# Questo è l’indirizzo che abbiamo configurato nello sketch di Arduino
address = 0x04
def writeNumber(value):
bus.write_byte(address, value)
# bus.write_byte_data(address, 0, value)
return -1
def readNumber():
number = bus.read_byte(address)
# number = bus.read_byte_data(address, 1)
return number
while True:
var = input("Inserisci 1 - 9: ")
if not var:
continue
writeNumber(var)
print "RPI: Ciao Arduino, Ti ho mandato ", var
# sleep one second
time.sleep(1)
number = readNumber()
print "Arduino: Hey RPI, ho ricevuto un numero ", number
print
Ecco un immagine che rappresenta come effettuare il collegamento tra Raspberry Pi ed Arduino:

Dopo quest’articolo di introduzione voglio annunciare ufficialmente che intendo andare fino in fondo per realizzare questo progetto e spero che possa essere realizzato senza incontrare intoppi.
Vi piace?
Che ne dite?
Ditemi cosa ne pensate così da migliorare il progetto perchè sarà davvero fantastico. Sono a disposizione per rispondere nei commenti. Il prossimo articolo sicuramente sarà molto più interessante di questo perchè porterà a far fare un altro passo verso la realizzazione di questo Particolare robot. Quindi nel prossimo articolo troverete altre informazioni interessanti per Costruire un robot rover con Arduino e Raspberry Pi. A presto!



Ottimo, cercavo proprio un articolo del genere.
Avevo provato ad interfacciare arduino e Rpi con la seriale, ma non mi aveva soddisfatto molto. Non vedo l’ora di provare l’I2C.
Anche se in questo momento il mio Rpi sta diventando un home server (samba/printer/torrent) 😛
Grazie Ivan!!!! 😉 Ottimo lavoro!!!! 😉
Ti chiedo solo di essere ancora più semplice nei tuoi articoli, molte persone come me non hanno problemi per la parte elettronica ma hanno difficoltà per la parte informatica del progetto.
Cosa è Python?
Tu scrivi:
“Bisogna installare il supporto I2C per Python (Documentazione, Quick2wire).”
Scusa ma io non conosco Python, come faccio a colmare questa mia lacuna?
Grazie!!! 😉
AngPri75
Python è un liguaggio di programmazione.
Vedendo che viene nominato sempre più spesso (dall’embedded alla scrittura di applicazioni web) ho deciso di dedicargli qualche ora leggendo questo testo:
http://www.python.it/doc/Howtothink/HowToThink_ITA.pdf
Sono stato preceduto per qualche minuto 🙂
Esatto, è un linguaggio di programmazione e per completare l’articolo per chi non conosce Python voglio aggiungere una definizione in più (http://www.python.it) :
Python è un linguaggio di programmazione dinamico orientato agli oggetti utilizzabile per molti tipi di sviluppo software. Offre un forte supporto all’integrazione con altri linguaggi e programmi, è fornito di una estesa libreria standard e può essere imparato in pochi giorni. Molti programmatori Python possono confermare un sostanziale aumento di produttività e ritengono che il linguaggio incoraggi allo sviluppo di codice di qualità e manutenibilità superiori.
…
Python è distribuito con licenza Open-Source approvata dalla OSI: il suo utilizzo è gratuito e libero anche per prodotti commerciali.
Interessante 😀
Anche io ho avuto modo di utilizzare il mio Raspberry Pi come Server…
Infatti ho realizzato questo basato sul Raspberry Pi come Web Server:
Prima parte- http://it.emcelettronica.com/raspberry-pi-casa-domotica-e-videosorveglianza-gestibile-da-remoto-con-assistente-personale
Seconda Parte – http://it.emcelettronica.com/raspberry-pi-casa-domotica-videosorveglianza-gestibile-da-remoto-con-assistente-personale-parte-2
Certo devo dire che non è il massimo di potenza, ma per il fatto che consuma davvero pochissima corrente rispetto ad un server vero e proprio, costa Pochissimo ed inoltre occupa anche pochissimo spazio, per gestire un piccolo server casalingo è davvero perfetto!
Visto che lo stai trasformando in un home server voglio consigliarti di collegare in rete un hard disk tramite il quale puoi avere sempre i tuoi file con te dovunque sei senza appogiarti ad un servizio Cloud di terzi.
Comunque sia, ha sempre la possibilità di essere overclockato fino a 1Ghz, quindi:
Cosa si può volere di più dalla vita?
A presto,
Ivan
Grazie!!!! 😉
Siete Grandi!!! 😉 Ho da studiare adesso… 😉
Ivan intanto che aspetto il tuo nuovo articolo puoi darci la “lista della spesa”, io ho Raspberry Pi ed Arduino Uno, cosa altro serve?
Se ci dai la “Lista della spesa” in anteprima iniziamo a procurarci tutto il necessario per il Robot Rover…
😉
AngPri75
Ottima idea!
Dopo aver finito il mio piccolo rover controllato a distanza con un Nunchuck Wii, stavo proprio pensando di realizzarne uno utilizzando RasPI per poterlo controllare dal browser come nel tuo articolo!
Solo, io avevo in mente di utilizzare solo RasPI, come mai l’accoppiata Rpi-Arduino?
Ehm.. ok non c’è problema 🙂
Come primo prototito il robot che sto realizzando avrà delle funzioni base, ma nulla toglie il fatto di poter aggiungere qualsiasi cosa si voglia aggiungere.
Ad esempio, il robot potrà avere una visuale a 360° grazie ad un paio di motori passo passo che faranno girare la webcam a destra, sinistra, sopra, sotto.
Questo lo farò dopo che il lavoro “grosso” è stato realizzato 🙂
I componenti che servono per la realizzazione principalmente sono:
– Arduino, che come ho detto pubblicherò il progetto di una board arduino stand alone adatta e predisposta per effettuare i vari collegamenti senza troppi fili volanti
– Raspberry Pi 😛
– Una Scheda per motori basata su l298 come questa:
http://www.ebay.it/itm/Scheda-L298-per-motori-passo-passo-stepper-shield-arduino-pic-/261219316629?pt=Componenti_elettronici_attivi&hash=item3cd1e27395
Riguardo a questa scheda consiglio di comprarla direttamente dalla cina per spendere la metà:
http://www.aliexpress.com/snapshot/246431405.html
– Un sensore ad ultrasuoni:
http://www.aliexpress.com/snapshot/246432236.html
– Una Webcam
– Un adattatore wifi
– Un telaio ne parlerò nel prossimo articolo 🙂
– Ruote e motori (ne parlerò più avanti)
– Pannellino a led o lampadina ad incandescenza 12v (come quella del bagagliaio macchina)
Ciao Ivan,
facendo varie ricerche su come realizzare un robot con rasp+arduino e dopo aver realizzato qualche piccolo mi è capitato di leggere il tuo articolo, io non ho molta esperienza nel settore però mi piacerebbe imparare e con i soli testi che sto consultando sono un po in difficoltà.
Nello specifico il mio desiderio sarebbe realizzare un robot che faccia già quello di cui abbiamo già discusso, come videosorveglianza, riconoscimento degli ostacoli, controllabile da remoto e etc etc però riguardo la parte robotica usando un HEXAPOD: http://learn.trossenrobotics.com/38-interbotix-robots/126-phantomx-hexapod-crawler.html
Ovviamente questo mio progetto ha un costo abbastanza elevato e lo riconosco ma credo che insieme si p
Ovviamente questo mio progetto ha un costo abbastanza elevato e lo riconosco ma questa è una mia scelta e credo che si possano creare delle basi generiche per adattare il cervello del robot cioè i collegamenti e la stesura del programma a vari corpi più accessibili che ne pensi?
Ciao
Principalmente l’ho fatto per sperimentare…
Infatti mi piace l’idea di poter affiancare due piattoforme e farle lavorare insieme… Inoltre ho deciso così per non appesantire troppo il processore del Raspberry Pi.
Infatti come ho scritto nell’articolo le due board dovranno svolgere dei compiti diversi per far funzionare il Robot.
Rpi si occuperà di svolgere il ruolo di Capitano perchè dirà ad Arduino come dovrà muoversi ed inoltre si occuperà anche di ricevere i comandi dal Comandante (chi guida il robot) e di fungere come Web Server dato che dovrà essere comandato a distanza tramite un Browser.
Che ne dici, ti andrebbe di collaborare per la realizzazione?
A presto,
Ivan
Posso permettermi di fare un’osservazione?
Hai da studiare Sempre! 😀
Non per cattiveria, non è una critica, è soltanto una mera constatazione di fatto: non esiste il massimo della conoscenza possibile e non esiste un vincolo alla conoscenza.
Sono contento che questo articolo ti abbia stimolato e che ti abbia fatto venir voglia di conoscere qualcosa di nuovo ed è anche per questo che questo blog esiste.
Far nascere dubbi, stimolare domande, far appassionare le persone al conoscere e pertanto, questa tua frase ha gratificato il nostro lavoro. 🙂
Sono contento che tu abbia trovato la traccia che ti serviva per iniziare a studiare, molto spesso serve davvero soltanto quello! 🙂
Non preoccuparti, non appena si parlerà del progetto completo, del suo sviluppo e del suo funzionamento sicuramente prima di cominciare, tra le considerazioni preliminari, la “lista della spesa” verrà certamente inserita.
Devi tener presente, quando chiedi “cosa altro serve?”, che a questa domanda non esiste mai una sola risposta ma se proprio cerchi una risposta universale è sicuramente “dipende!”. 😉
Dipende da qual è l’applicazione che vuoi sviluppare, quali sono le specifiche che hai capito che deve rispettare, quali sono i vincoli che ci sono stati dati e soprattutto quelli che sono stati desunti nel corso dello sviluppo del progetto.
Per esempio questo Robot Rover potrebbe, se qualche utente dovesse far richiesta, essere arricchito nella sua idea di base da qualche features aggiuntiva…
Per esempio potrebbe essere interessante che questo robot sia in grado di evitare gli oggetti e nel contempo di riconoscerne il colore…
Questa particolare caratteristica potrebbe anche essere implementata in software ma voglio farti capire che, quando parleremo del progetto completo, e mi auguro che molti altri utenti facciano delle richieste o lancino delle idee, ad Ivan cercheremo di complicare un po’ le cose, magari con lo scopo, neanche troppo nascosto, di far sviluppare a lui e a chiunque voglia collaborare un progetto di gruppo… 🙂
Eh, sì… Da queste parti si pensa in grande! 😀
Ci credi se ti dico che ormai quando leggo “Raspberry Pi” io penso subito “Lucasss”? 🙂
Ti aspettavamo… 😉
Ecco, avete presente quando qualche commento più sopra ho scritto che questo potrebbe diventare un progetto più complicato e collaborativo? Ecco, questi due utenti potrebbero lavorare benissimo insieme, secondo me! 😉
Lo vedi, AngPri75?
L’appetito vien mangiando, come si suol dire… 🙂
Lo stesso Ivan ha scritto “nulla toglie il fatto di poter raggiungere qualsiasi cosa”.
Perché la verità è che questo genere di progetti può crescere in qualunque direzione (potenza della Maker’s Revolution!) praticamente in ogni momento e pertanto… Torno a suggerire…
PROPONETE 😀
Non per niente ma perché non si tratta di rendere davvero la vita complicata ad Ivan oppure rendergli più difficile completare un progetto ma si tratta di imparare, per l’appunto, di approfondire, di studiare… Anche cose che non si erano mai viste prima… 😀
Inoltre noi saremo ben felici di pubblicare ogni release di questo progetto.
Tanto di tempo fino alla fine del contest hai voglia che ce n’è :D:D:D
Ora, scusatemi, avrei dovuto ribadirlo anche qui all’inizio dei miei interventi ma io purtroppo questa settimana sono stato molto poco presente (per ragioni di studio!) per cui se qualcosa che ho detto risulta ripetuta, perdonatemi 🙂
Esatto!
Non c’è mai limite all’ignoranza, nel senso che anche quando si crede di conoscere ormai tutto, quando si fanno delle scoperte nuove ci si accorge che tutto quello che è stato scoperto fino a quel momento non è niente in confronto a quello che ancora c’è da scoprire.
Anche io sono contento che questo artcicolo ti abbia stimolato ed inoltre spero che sei soddisfatto del primo articolo visto che lo aspettavi ormai da un po di tempo 🙂
Spesso serve proprio ricevere un Input che invogli al darsi da fare e cercare di sapere ed applicare sempre di più per migliorarsi e… migliorare il Mondo 😀
Eccomi Eccomi 😉
Certo che ci sono per una collaborazione 😉
Il mio tempo a disposizione è sempre meno, ma come sempre cerco di fare il possibile, quindi per ogni cosa…sono qua 😉
Guarda, come ho detto nell’articolo uno degli obbiettivi è proprio quello di Integrare un sistema di automatizzazione per inserire il robot in un sistema di sorveglianza ed allarme.
Quindi dovrà evitare gli ostacoli, riconoscere che tipo di ostacoli incontra e quindi rilevare anche il colore dell’ostacolo, dovrebbe persino poter riconoscere se qualcosa per casa non và…
A me piace complicarmi la vita, quindi nel limite del possibile Eccomi quì 😀
Colgo l’occasione per ricordare che un po di aiuto nella programmazione non mi dispiacerebbe affatto e che quindi accetto aiuto da chiunque abbia un po di volontà e tempo (quello che purtroppo viene a mancare sempre di più).
Grazie x i vostri messaggi… 😉
Sto studiando!!! 😉 Sono d’accordo con voi… e penso che fino alla bara sempre s’impara!!! 😉
L’appetito vien mangiando!!! 😉 e io sono una “buona forchetta”…
Sto pensando a come fare in modo che il Robot Rover funzioni senza problemi sia di giorno che di notte e che veda tutto sia di giorno che di notte.
Sto pensando a come fare in modo che il Robot Rover funzioni almeno 2 giorni senza fermarsi, come si potrebbe fare?
La “cosa” dei colori è interessante… come si potrebbe fare?
Io non sono aggiornato… sicuramente ci sono telecamere e sensori di nuova generazione che fanno al caso nostro, aspetto link… (tenete conto che il mio budget è limitato).
Buona settimana e buon lavoro…
😉
AngPri75
Allora… Buon Appetito 😀
Per vedere anche la notte ci sono due modi:
1. Utilizzare il sistema di illuminazione che avrà incorporato il robot individuando ostacoli facilmente con il sensore di ultrasuoni;
2. Utilizzare Una Webcam con dei led IR.
Il secondo caso probabilmente non è la migliore soluzione in quanto i led IR sono pochi…
Almeno due giorni senza fermarsi? 😀
E’ possibile, ma visto che tu stesso hai detto che il tuo budget è limitato (anche il mio) non è molto fattibile.
Infatti devi considerare che i motori consumeranno tanta corrente e perciò hai bisogno di un pacco batterie davvero grande oppure se nella tua applicazione c’è n’è la possibilità puoi utilizzare una stazione di ricarica, ne parlerò in un articolo 🙂
Cosa vorresti farci fare al tuo Robot (Due giorni? ?.? ) ? 🙂
Quasi dimenticavo di parlarre delll’ applicazione per riconoscere i colori…
Si è molto più che possibile!
In questo Blog grazie a Piero infatti è uscito un articolo molto completo ed interessante che spiega come costruire un riconoscitore di colori con… Arduino!
E’ un progettino che il costo di produzione è davvero basso in quanto per realizzarlo bastano alcune fotocellule.
Ecco il Link:
http://it.emcelettronica.com/riconoscitore-di-colori-non-vedenti-daltonici-fai-da-te
Sto vedendo che bisogna essere utenti Premium per poter vedere l’articolo…
Perchè non ti abboni? 🙂
Poco più di 2 euro al mese per sostenere questo magnifico sito con le sue iniziative è davvero pochissimo rispetto a quello che si spende per cose poco utili 🙂
A presto,
Ivan.
Grazie Ivan!!!! 😉
Ivan io pensavo a 2 giorni di funzionamento per fare da “sentinella” quando si va via di casa per il weekend… spesso si va via per il weekend e con il pensiero si pensa sempre alla casa lasciata incustodita… il Robot Rover sarebbe un “guardiano” che ti rassicura comunicando…
Stavo pensando ad alimentare il Robot Rover oltre che con delle batterie anche con delle mini celle solari, cosa ne pensi?
Puoi darmi qualche informazione in anteprima sul telaio…
Spero che sia un telaio economico che andrà bene per più progetti… 😉
Ho già pensato di abbonarmi… 😉 è una cosa che farò sicuramente nelle prossime settimane… 😉
A presto,
😉
AngPri75
Ciao 🙂
Allora… come ho scritto nell’articolo quello che sarebbe bello arrivare a fare è:
Integrare un sistema di automatizzazione per inserire il robot in un sistema di sorveglianza ed allarme.
Quindi automatizzato e in automatico “vede” se c’è qualcosa fuori posto.
Per la prima versione è già un ottimo risultato poterlo guidare a distanza e perciò farlo stare due giorni in funzione è possibile, ma come ho scritto in un commento bisognerebbe installare una stazione di ricarica, cosa che il progetto integra 🙂
Per i pannellini solari si potrebbe fare, ma tieni conto che dentro casa non c’è molta luminosità per far funzionari i pannellini al massimo.
Casomai potrebbe funzionare a pannelli solari la stazione di ricarica 😀
A presto,
Ivan
Davvero molto interessante il progetto.
Spero allora che al prossimo articolo ci potrai consigliare nel dettaglio tutti gli articoli da acquistare, in modo da poter fare un unico ordine e cominciare con il lavoro…Grazie 🙂
Certo!
Nel prossimo articolo di questa serie che è già in fase di scrittura si avrà una panoramica di tutto il materiale che bisogna acquistare per realizzare la versione base di questo Robot.
Naturalmente è scontato che bisogna avere Un Raspberry Pi Ed un Arduino 😀
Riguardo al case del Robot…
Voglio rassicurare chi mi ha chiesto se il case del Robot è economico ed infatti voglio rispondere così: NON COSTA NULLA 🙂
Ebbene Si… Dopo aver cercato un case adatto alle mie esigenze ho scelto di utilizzarne uno Riciclato di alluminio a costo zero.
Però non voglio dare troppe anticipazioni dell’articolo, perciò abbiate pazienza 😀
A presto,
Ivan
Ciao Ivan 😉 come stai?
Aspettiamo il tuo articolo!!! 😉
Io non ce la faccio più ad aspettare… 😉
Dacci qualche anticipazione…
Vorrei in questi giorni che ho un po’ più di tempo fare qualcosa…
Interessante l’idea di usare un riciclato di alluminio come case…
Come deve essere il riciclato in alluminio…
Dicci qualcosa in più… 😉
Buon pomeriggio e buon lavoro…
😉
AngPri75
Ciao AngPri75..
Mi dispiace tanto ma questo è un periodo molto carico di impegni e non sto avendo molto tempo a disposizione, perciò per farmi perdonare voglio dirti di capitare almeno un lettore o masterizzatore CD/DVD.
A PRESTO,
Ivan
Ciao Ivan 😉
Cosa vuol dire “capitare”?
Mi hai incuriosito… spiegati meglio…
Un’altra cosa: sto vedendo schede “Arduino Motor Shield”…
Quale andrebbe bene per il tuo progetto?
Fammi sapere… 😉
AngPri75
Eccomi quì..
Per capitare intendo di non comprarlo dato che ti serve solo il case ma di chiederlo a qualcuno che ne ha uno rotto o se l’hai tu.
Per gestire i motori sto optando per una soluzione abbastanza semplice..
Una scheda basata sul classico l298 comprata a €4.
Naturalmente non la trovrrai a questo prezzo in Italia dato xhe chi vende certi articoli ne approfitta. Io l’ho comprata su aliexpress.
Tramite questo circuito integrato posso gestire i motori a coppie.
Ma dai.. abbi ancora un pò di pazienza che l’articolo è in scrittura 🙂
A presto,
Ivan
ciao, interessante il tuo progetto, ne ho preso spunto. stai continuando? io sto vedendo un pò la parte in python ed eventualmente un semplice controllo via web…
ciao
Ciao ma la continuazione di questo articolo dov è?
Ciao a tutti,
Quello che voglio fare con questo commento è solo comunicare a tutti che ho ripreso in mano il progetto che per diversi fattori (studio, tempo e denaro…) ho dovuto mettere in pausa.
Perciò, con questo commento voglio affermare che non ho abbandonato, e non ho intenzione di farlo questo progetto visto che mi sta davvero a cuore.
Prossimamente continuerò a lavorare sulla parte hardware (il corpo del robot compreso i motori) e sul software.
Per chi ha chiesto dove è la continuazione di questo articolo dico quindi di pazientare ancora un po.
Chi volesse darmi dei consigli o vuole aiutarmi è sempre ben accetto.
Stay tuned!
A presto,
Ivan
anche io sto portando avanti la cosa, il rover lo avevo già e quindi motori ponte h e chassis sono a posto…..ora lotto con le batterie e la parte wireless.
attendiamo con ansia
ciao
ottimo! 🙂
ciao, ieri sera il mio rasduinobot ha fatto i primi passi (o meglio rotoli essendo su gomma). Per adesso è tutto manuale con il seguente flusso:
php–>socket–>raspy–>i2c–>arduino—>ponte h—>2 motori
dalla pagina php posso vedere le immagini dalla webcam sul rover e pilotarlo nelle 4 direzioni.
Per il wifi ho scelto di configurare la parte wlan del raspy come un AP per non essere legato alla copertura del router casalingo.
Adesso devo lavorare di saldatore per sistemare i vari collegamenti 🙂
Ciao Raghi11, Ti scrivo perche sarei molto interessato a questo collegamneto php->socket->rasp…
Hai per caso sviluppato qualcosa o sai dove poter avere delle info.. Grazie
Ciao, sapete dirmi dove posso trovare spunti o risorse per realizzare la parte raspberry in c/c++?
Ciao, complimenti x la spiegazione, grazie al PI sto riprendendo a programmare, volevo integrare il tuo progetto con open cv, il problema é che non trovo un tutorial semplice che funzioni, sono riuscito a far parlare il raspy con pronuncia italiana ma non trovo nulla x fargli scrivere quel che sente, mi piacerebbe insomma renderlo interattivo x far giocare anche mio figlio, io uso il PI 3 che mi avete regalato con l’abbonamento premium e un Arduino mega ( che già avevo), nel progetto puoi integrare anche i tutorial x le parrucche mi mancano?
Ciao Michele, non credo che scriverò altro sull’argomento, ma ti posso consigliare di cercare Jasper Raspberry Pi, magari è un progetto che ti può risultare utile 🙂