
Nei precedenti articoli è stata affrontata la costruzione della scheda di controllo e l’assemblaggio del telaio del robot LittleBot, che è possibile comandare tramite l’utilizzo di uno smartphone su cui è stata caricata una speciale APP.
Questo articolo illustrerà come comandare il robot utilizzando la Scheda Arduino Esplora equipaggiandola con un modulo Bluetooth, dotandola di una batteria che la renderà autonoma e si farà riferimento a quanto appreso in alcuni articoli già pubblicati su Elettronica Open Source.
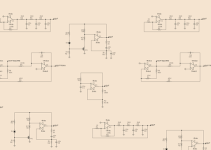
Per migliorare l’affidabilità della stazione di controllo, rispetto a quanto in precedenza pubblicato, il modulo di alimentazione è ora rappresentato da un’unica scheda che comprende il caricabatteria, l’alimentatore e un sistema per il controllo dello stato di carica.
Per quanto riguarda il programma di controllo, sarà possibile leggere sul display della scheda Arduino Esplora lo stato dei sensori installati sul robot.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 4168 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.



Devo dire di essere molto contento di questo articolo.
Non soltanto perchè piace a me ma perchè so che moltissimi di voi lo stavano aspettando.
Adriano ha fatto un grandissimo lavoro, davvero ammirevole.
Complimenti.
Attendiamo notizie sul kit 😉
Ti ringrazio Piero
Spero proprio che qualcuno lo costituisca in modo da avere un riscontro sul lavoro fatto.
Poi se qualcuno realizza un nuovo programma, lo li potrebbe condividere con il gruppo.
Per quanto riguarda il kit, sono in attesa di definire alcune questioni, chi fosse interessato, lo dica dica e vedremo di provvedere.
Davvero un lavorone.
Non so che dire, sono senza parole.
Ti ringrazio Giorgio! Effettivamente è stato un buon lavoro, sono contento che sia apprezzato.
complimenti ! un lavoro ben fatto e ben descritto!
P.S,.
ruberò sicuramente qualche idea 🙂
Grazie! Prendi pure quello che ti serve. Tra l’altro se guardi tra gli altri miei articoli pubblicati troverai sicuramente molte altre soluzioni da utilizzare nei tuoi progetti.
Trackbacks/Pingbacks
[…] di elaborazione a bordo, sarebbe un territorio proibito per la robotica cloud. Per esempio, il controllo del movimento di un robot, che si basa molto su sensori e feedback, non beneficerà molto del […]
[…] di elaborazione a bordo, sarebbe un territorio proibito per la robotica cloud. Per esempio, il controllo del movimento di un robot, che si basa molto su sensori e feedback, non beneficerà molto del […]