In questa serie di articoli viene presentata la realizzazione completa del RinoBOT, un robot in grado di muoversi autonomamente ed interagire con l'ambiente. In particolare in questo articolo si descrive la scheda di controllo che governa il robot azionando i motori tramite ponti ad H e il sistema di comunicazione per il telecontrollo del robot stesso.
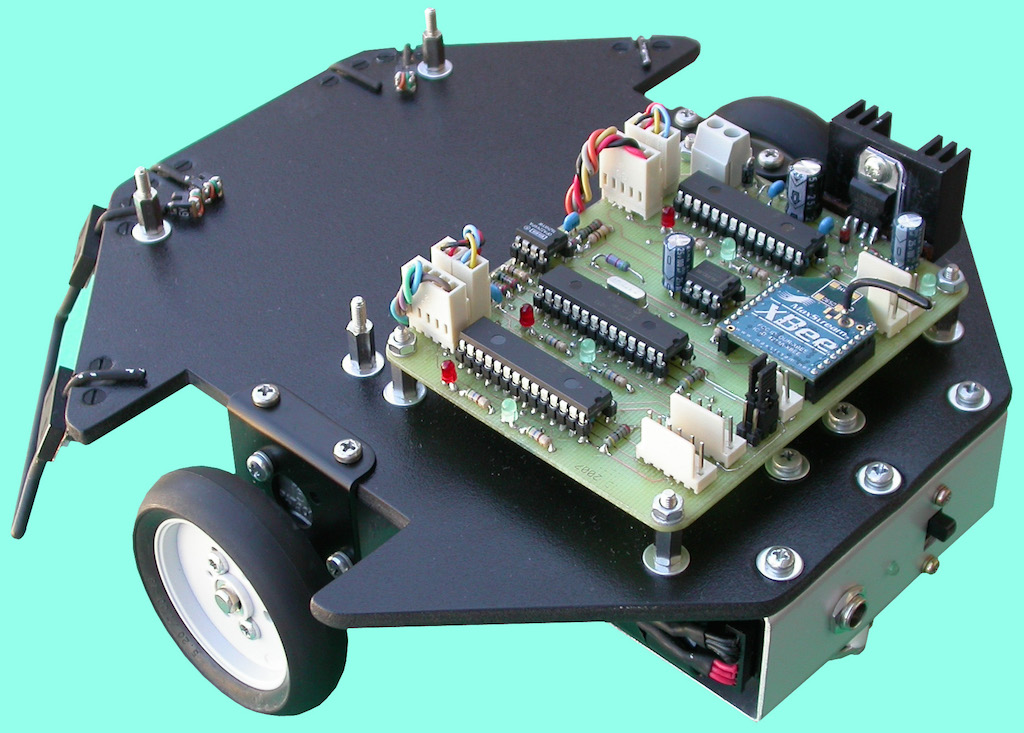
Sin dai primi tempi della mia "infanzia elettronica" ho sognato di costruire un robot autonomo. Ma, allora, un simile progetto era troppo difficile e costoso. Ora è pienamente possibile. Avendo a disposizione hardware potente e poco costoso e, soprattutto, un sistema di sviluppo utilizzabile su un normale computer. Inoltre tutte le informazioni relative a tali dispositivi, contrariamente a quei tempi, sono facilmente reperibili su Internet. Nella prima parte di questa serie di articoli, mi limiterò a descrivere il sottosistema di controllo della navigazione (vedi foto 1). Il sistema "dsNavCon", come lo chiamo io, dotato di una MCU Microchip di tipo “motor controller” dsPIC30F4012, e una MCU di tipo “general-purpose” dsPIC30F3013.
Foto 1 - Questo è l'intero sottosistema di controllo di Navigazione. E' installato sulla piattaforma robotica “Rino”.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3208 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.



Il DSpic è il micro ideale per questo tipo di applicazioni. Ho avuto modo di lavorarci varie volte e mi sono sempre trovato bene, soprattutto in assembler che, ben organizzato, era leggibile e scorrevole come il C ma ovviamente più performante.
Non credo mi cimenterò mai nella realizzazione, non ho mai amato la robotica (anche se non so spiegarmi il perchè) però ho letto con passione (e tutto d’un fiato) l’articolo.
Attendo di vedere il software, sono curioso 🙂
Se è piaciuto l’articolo… allora un minimo di “germe” della robotica, c’è!
Magari si può iniziare con cose più semplici e poi migrare verso alti lidi 😉
Normalmente si parte con i Mini-Sumo o i Line-Follower. C’è chi ama dedicarsi alla costruzione da zero per hardware e software, chi non ha tempo o voglia e prende delle soluzioni già impostate e si dedica solo ad uno degli aspetti. Il solo consiglio è partecipare, anche solo come spettatore a qualche gara… e poi forse la voglia, prende!
A proposito di Gare e di Robotica in genere!!
Per chi vuole scoprire questo nuovo mondo, per chi lo conosce e vuole tenersi aggiornato o semplicemente per un confronto tra esperti…
A Maggio c’è una raduno nazionale di appassionati di Robotica [1].
Si replica l’evento dello scorso anno [2], che è stata la prima ufficializzazione a Roma di precedenti raduni goliardici che avvenivano annualmente tra Pisa e Parma all’interno di altri eventi (tipo la RoboFesta del Fascetti di Pisa).
Ci saranno esposizioni di vario genere, ci saranno diversi workshop e soprattutto ci sarà tanta passione attorno ad un argomento che, anche se non sembra, è molto vasto. Si parlerà di piccole piattaforme robotiche, di nuove schede progettate per l’occasione, di ROS (Robotic Operating System), di OpenCV dedicata e molto altro…
[1] http://2015.officinerobotiche.it
[2] http://2014.officinerobotiche.it
Mi fa piacere incontrarti anche su Elettronica Open Souce, i tuoi robot sono certamente molto più complessi e sofisticati di quelli che ho realizzato io.
Credo che per gli amici “robottari” sia doveroso fare un giro sul tuo sito http://it.emcelettronica.com/author/guido_ottaviani
dove potranno trovare vari esempi di realizzazioni.
Ops! sbagliato il link, ecco quello corretto http://www.guiott.com/
potrebbe essere adeguato anche per un rasaerba ?
Grazie Adriano!! Anche il tuo sito è una continua fonte d’informazioni precise e molto dettagliate!
@Antonio: Certo… non a caso uno degli amici (nel gruppo Officine Robotiche) lo ha fatto partendo da un aspirapolvere per casa e poi passando al tagliaerba. Le basi di studio sono comuni. Lo scambio continuo degli avanzamenti e dei progressi, e il tanto studio di tutte le possibili problematiche, poi, ne hanno fatto un grande prodotto!