Con questo articolo concludiamo la trattazione del progetto di un controllore PID per un motore DC: andremo ad effettuare un'ultima modifica inerente al nostro sistema, in particolare in prossimità della dinamo tachimetrica, al fine di incrementare ancor più le prestazioni in termini di precisione di posizione rispetto che in termini di controllo di velocità. Infine, saranno mostrate tutte le differenze che si hanno tra il segnale di controllo e la grandezza reale, ossia gli errori veri e proprio mostrando qual'è la combinazione finale dei guadagni che minimizzi l'errore di posizione, mantenendo un buon controllo di velocità.
Le prestazioni ottenute possono essere ulteriormente migliorate, andando a modificare in maniera opportuna i guadagni dei regolatori, oppure andando ad esercitare un’azione filtrante sulla dinamo tachimetrica, al fine di diminuire l’effetto del disturbo.
Inizialmente abbiamo provato ad abbassare il valore del guadagno dell’azione integrale (Ki) e aumentare il valore del guadagno dell’azione proporzionale esterna (Kp2).
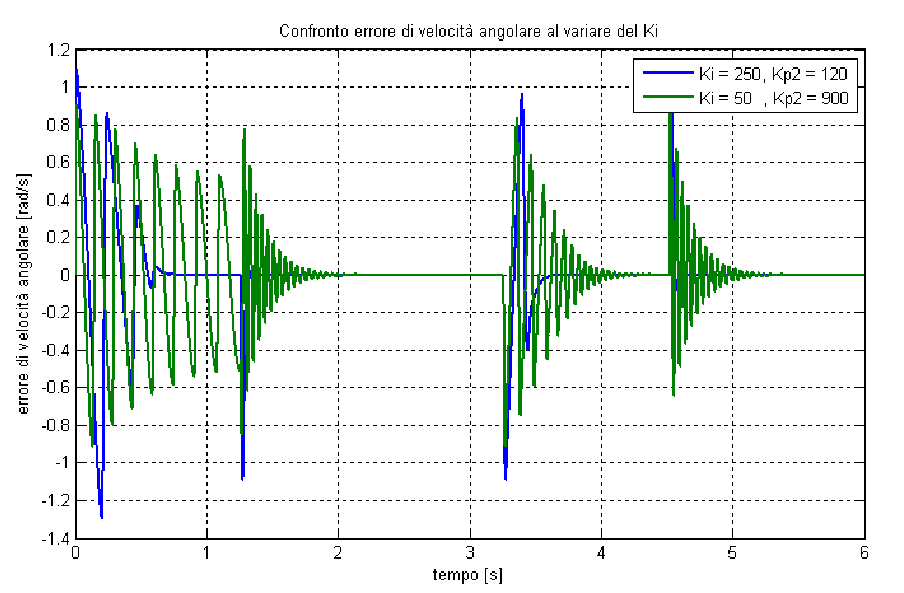
Nei seguenti grafici abbiamo scelto un valore fisso del Ki, pari a 50, e abbiamo cercato di ottimizzare le prestazioni di velocità e di posizione andando a variare il guadagno Kp2:
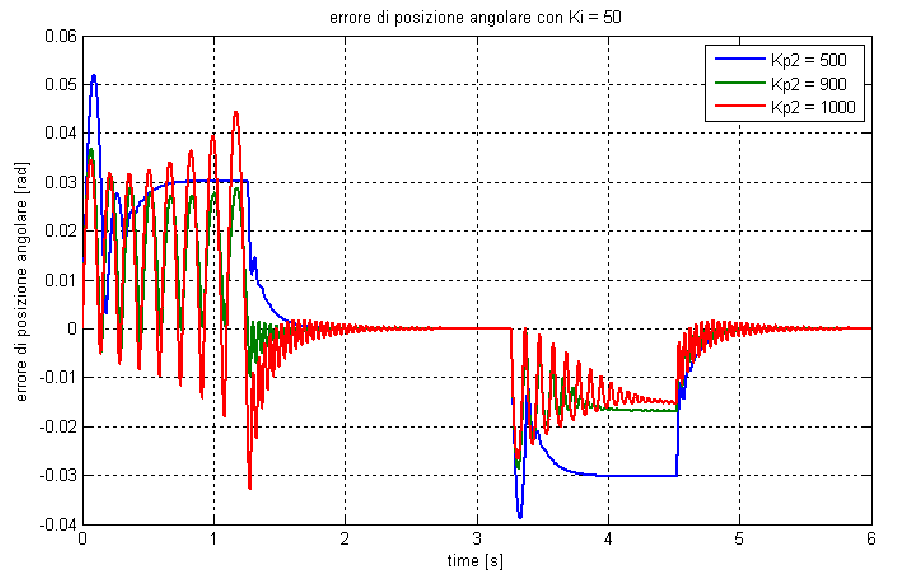
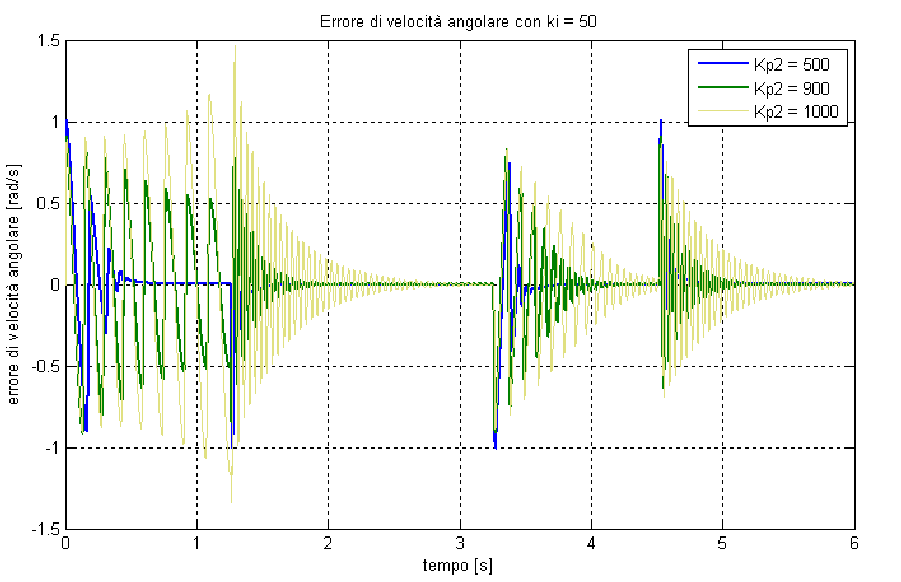
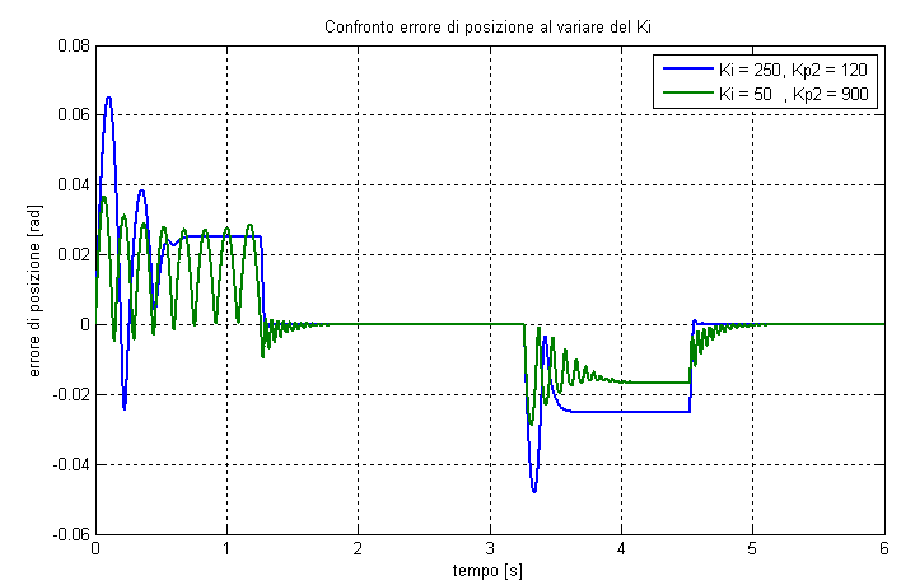
Come si vede le migliori prestazioni si ottengono con il valore Kp2 = 900. Infatti già con un valore dI Kp2 pari a 1000 il sistema comincia a presentare forti oscillazioni. Nei seguenti grafici vengono confrontati i risultati ottenuti precedentemente con Ki = 250 e Kp2 = 120 con i risultati adesso ottenuti.
Si riscontra che si è ottenuto un miglioramento delle prestazioni in posizione a discapito delle prestazioni in velocità, sempre in virtù dell'osservazione già fatta in merito all'applicazione in cui utilizzare il motore.
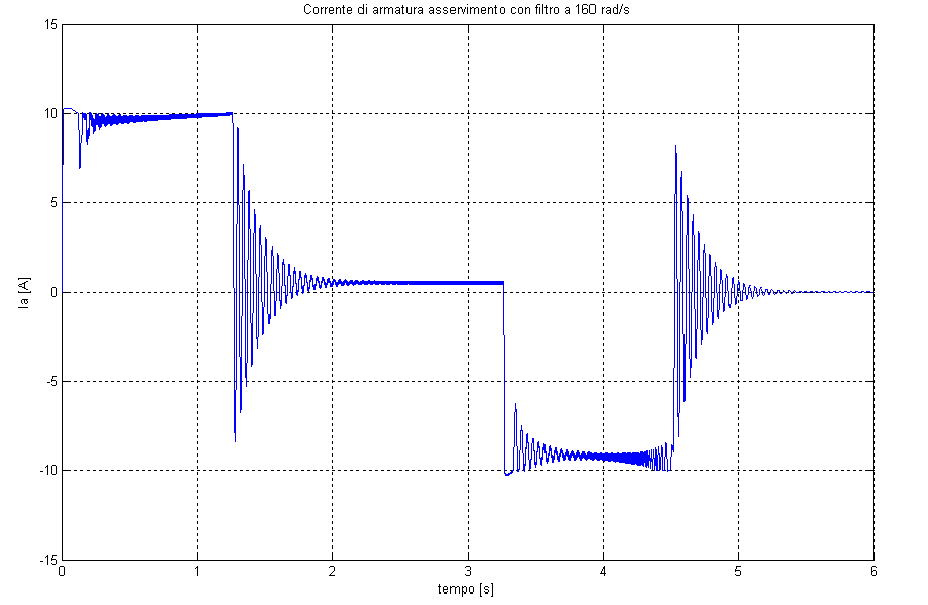
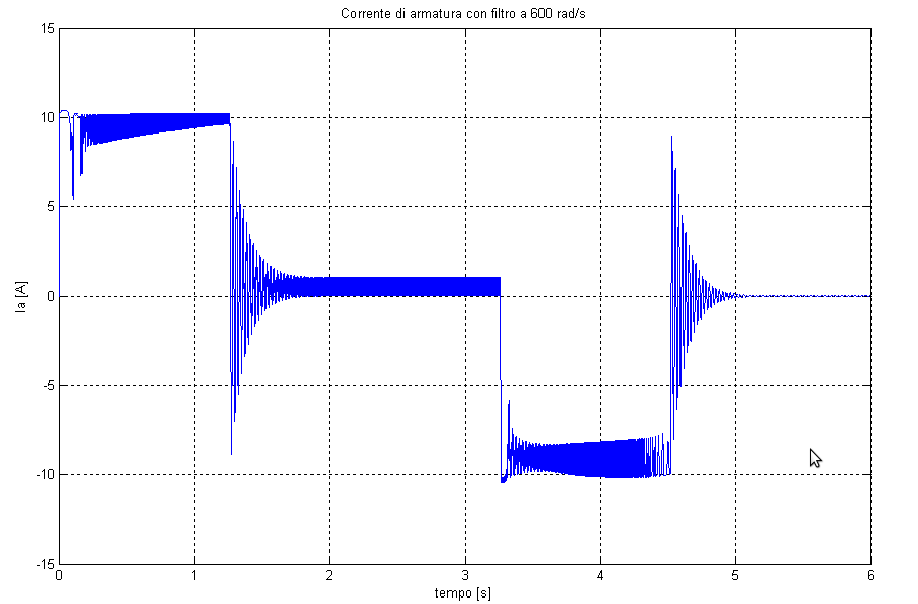
In virtù dei cambiamenti effettuati alle varie costanti di guadagno, andando ad esaminare la corrente di armatura, si nota che essa presenta un andamento del tutto anomalo, manifestando eccessive oscillazioni.
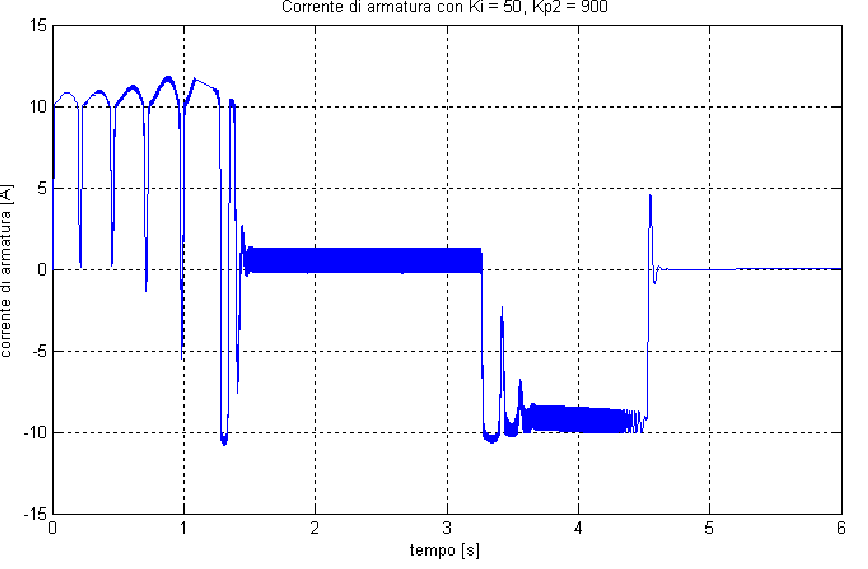
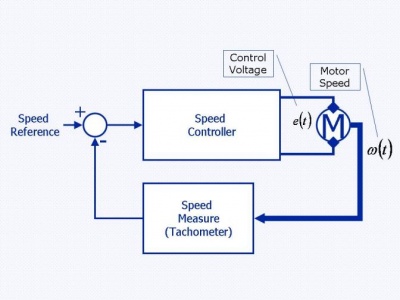
Per ovviare a questo sgradevole effetto che ovviamente inficia le prestazioni ottimali del motore, si propone un'azione filtrante sulla dinamo tachimetrica. Per tanto mostriamo lo schema complessivo includendo anche quest'ultima modifica, la quale sarà presente in tutte le prossime simulazioni/grafici mostrati.
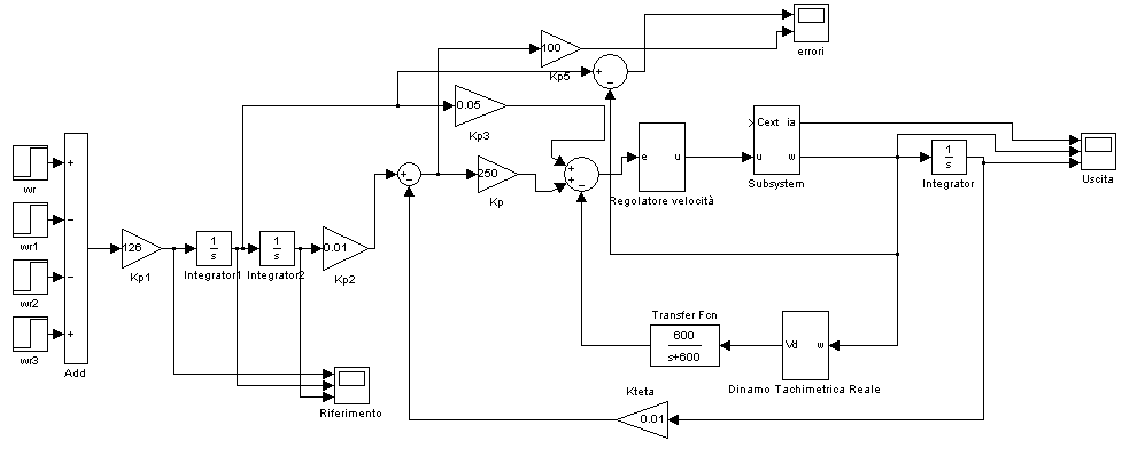
Come si può dedurre dalla figura precedente, l’azione filtrante è stata realizzata con un filtro passa-basso, la cui frequenza di taglio è stata scelta guardando le prestazioni del sistema in errore e in posizione. In particolare si è scelto come punto di partenza una pulsazione di taglio di 160 rad/s, e si è modificato in maniera opportuna i valori del Kp, del Ki e del Kp2, cercando di ottimizzare i due errori.
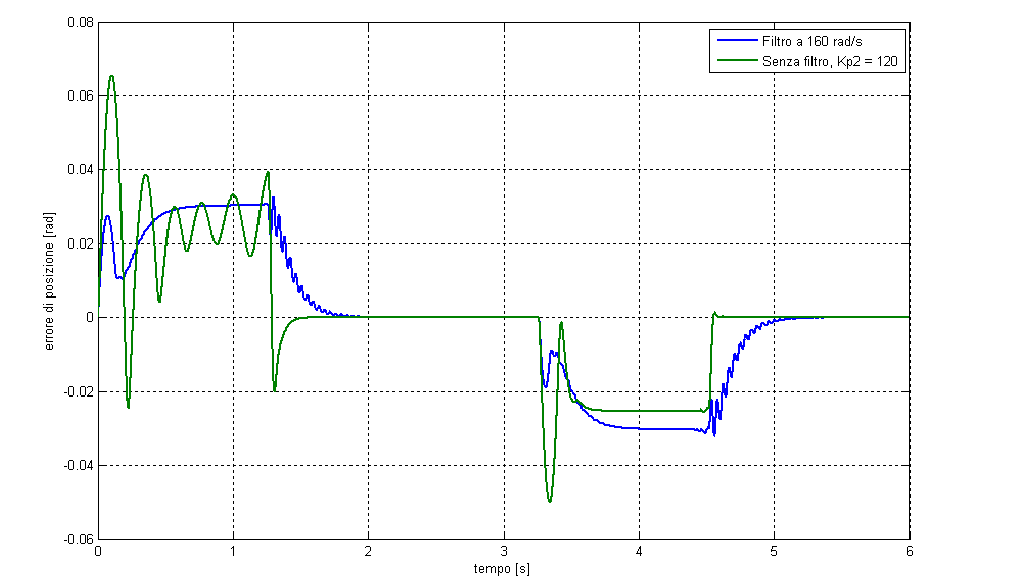
La migliore prestazione con tale valore della pulsazione di taglio è stata ottenuta con la seguente combinazione dei parametri:
-Kp=12
-Ki=100
-Kp2=120
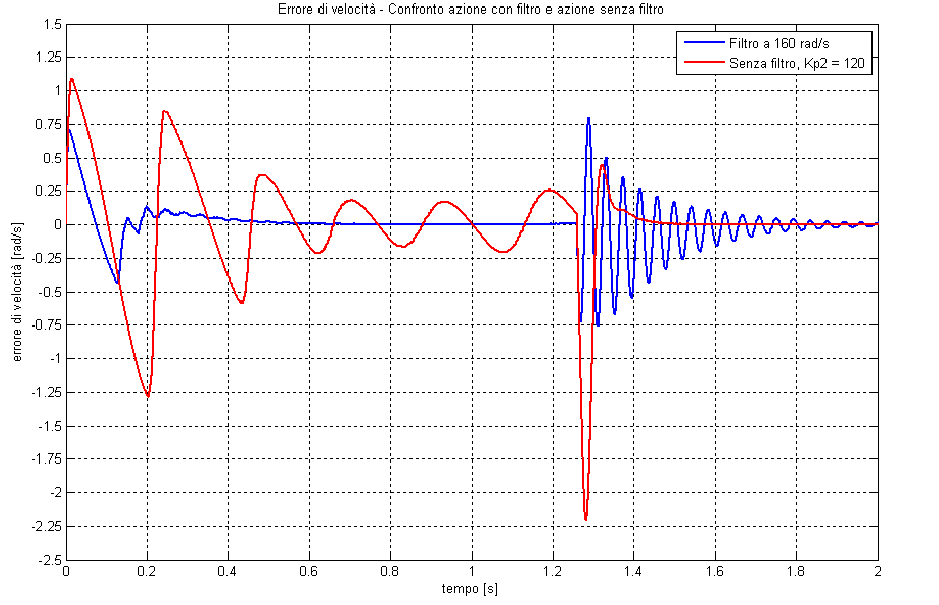
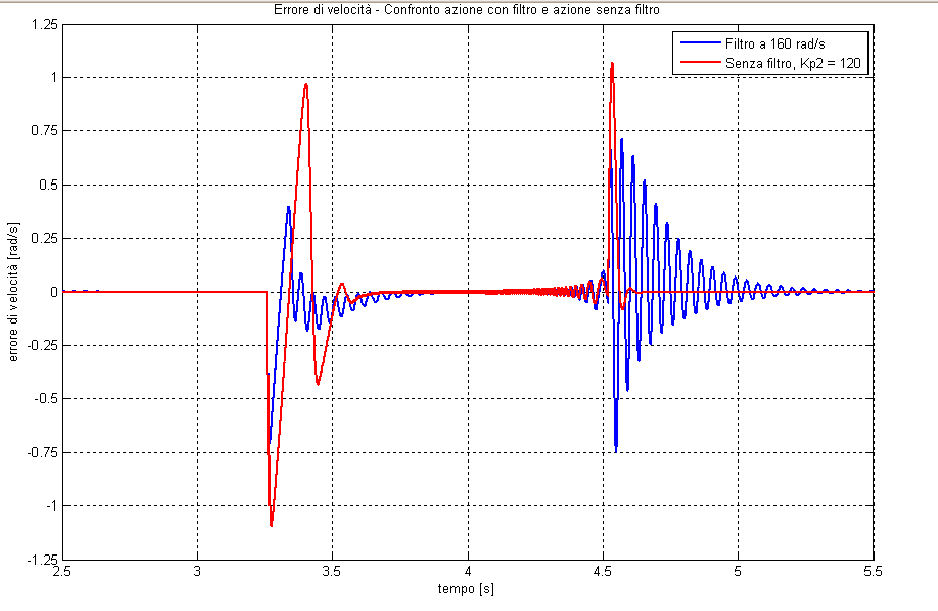
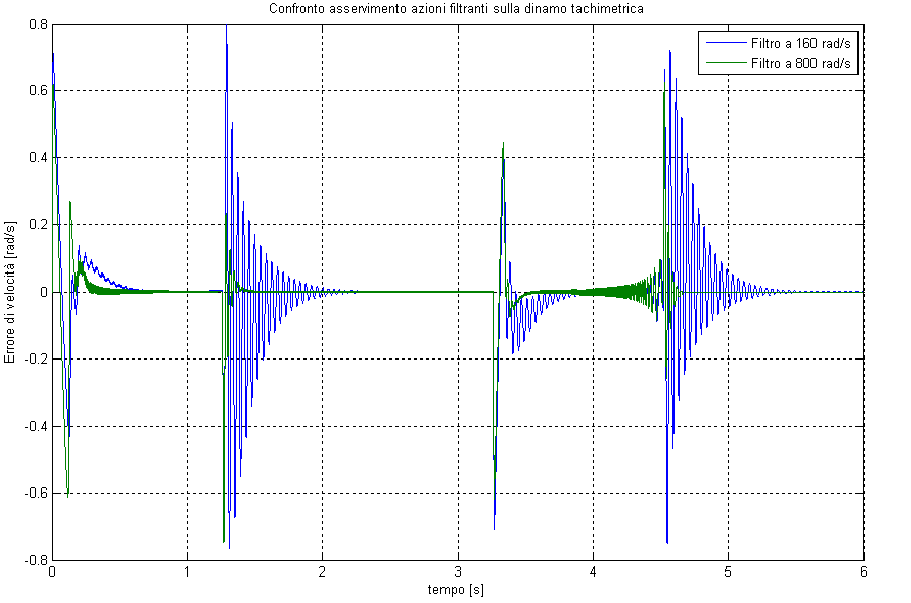
Nei seguenti grafici vengono confrontate le prestazioni senza l’azione filtrante e con l’azione filtrante, ed inoltre è stato riportato l’andamento della corrente di armatura per mostrare gli effetti "benefici" del suddetto filtraggio:
Un’ulteriore simulazione è stata effettuata con un filtro avente pulsazione di taglio pari a 800 rad/s. La combinazione di parametri che garantisce le prestazioni ottimali è la seguente:
-Kp=15
-Ki=400
-Kp2=180
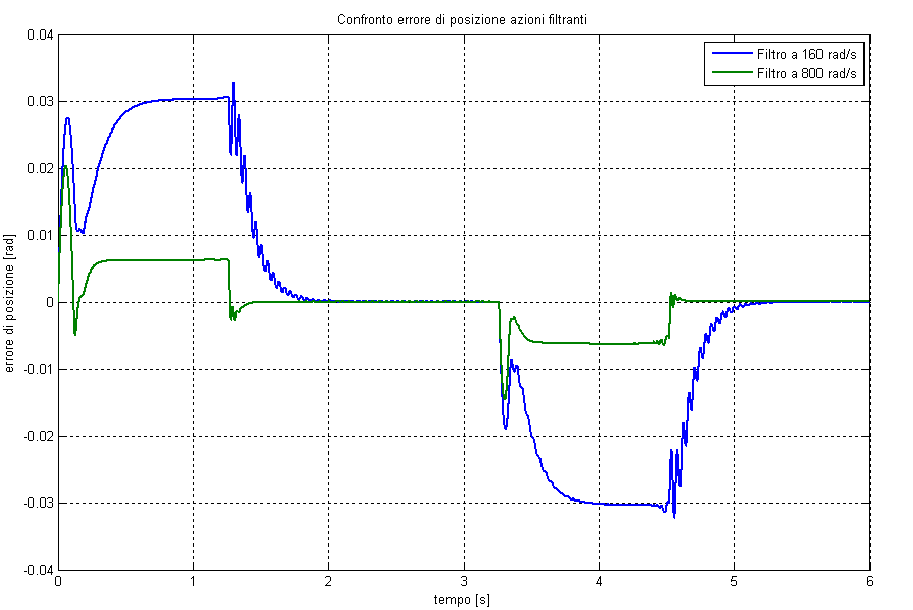
Di seguito vengono confrontati i risultati ottenuti con quest’ultima azione filtrante e i risultati ottenuti con l’azione filtrante a 160 rad/s: In particolare si nota che la corrente di armatura ottenuta con tali valori dei parametri ha un andamento di gran lunga migliore rispetto al caso precedente in quanto la forma d'onda presenta picchi meno accentuati e fronti d'onda meno oscillanti e netti.
 [5_29]
[5_29]
Infine, indagango ulteriormente sui vari parametri, si è constatato che con un’azione filtrante a 600 rad/s, e un’opportuna scelta dei parametri, le prestazioni risultano ulteriormente migliorate, avendo ottenuto un errore massimo di posizione dell'1,2% (0.012). La combinazione di parametri tale da garantire questo risultato è la seguente:
-Kp=22
-Ki=350
-Kp2=250
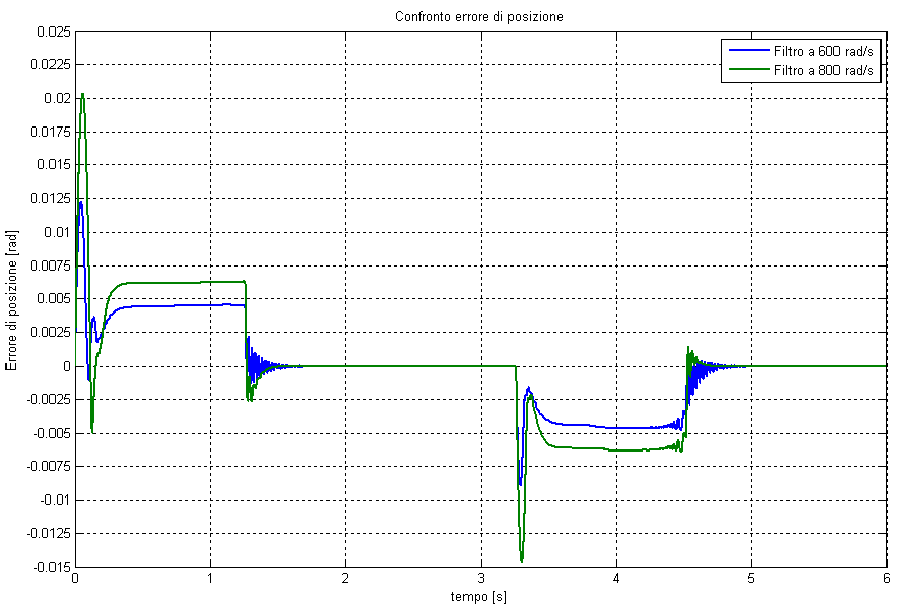
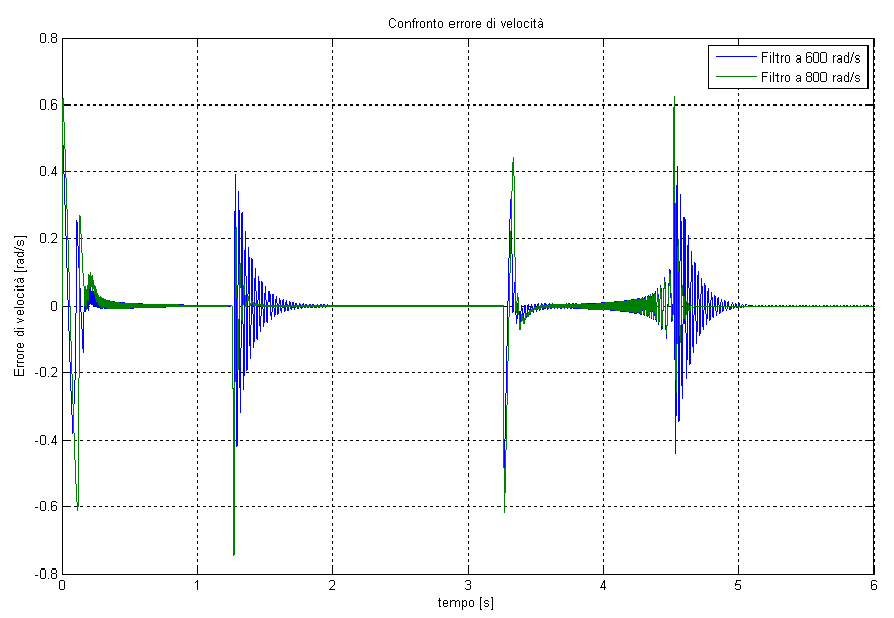
Concludendo possiamo dire che scegliendo il filtro a 600rad/s riusciamo ad ottenere un errore di posizione massimo del 1,25% mentre invece l'errore di velocità risulta essere più significativo proprio perchè abbiamo preferito avere una precisione migliore sulla posizione. Con considerazioni duali si potrebbe arrivare a una migliore performance sull'errore di velocità.
Infine, si ricorda che sono state introdotte soltanto due delle tre possibili azioni di controllo e cioè la proporzionale e l'integrata (PI con Feed Forward) tralasciando l'azione derivativa. Quindi un possibile sviluppo futuro potrebbe essere quello di utilizzare un controllore PID completo e confrontare se i risultati in termini di errore sia di posizione che di velocità sono migliori rispetto all'ottimizzazione ottenuta in questa trattazione.
Questo articolo è parte di una tesina sul controllo di un motore in corrente continua. Analisi e progetto con Matlab/Simulink

Grazie Mark…questa era una mia tesina di un lavoro di gruppo della triennale ci ho buttato parecchio “sangue” a farla 🙂