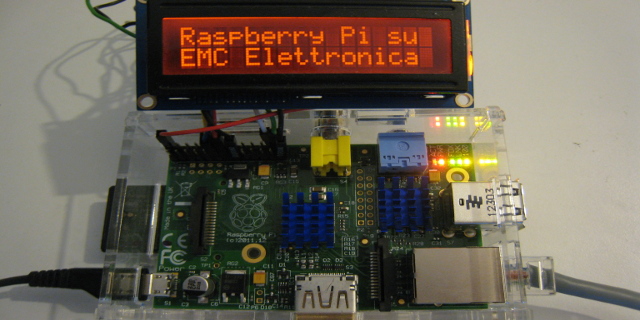
Le periferiche HDMI, USB ed Ethernet sono solo tre delle tante periferiche messe a disposizione da Rpi per poterlo interfacciare con l’hardware necessario ad un normale utilizzo. Ma Rpi non si ferma qua, infatti, integrato nel pcb, vi è un connettore il quale mette a disposizione SPI, USART, I2C, e GPIO per potervi collegare sensori, eprom, microprocessori e molo altro! Vediamo come poterli gestire con apposite librerie in linguaggio C!
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2941 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
EOS-Book @7 Speciale Stampanti 3D
EOS-Book @D Speciale Internet of Things
Scopriamo la piattaforma SensorTile.box: data logger su MicroSD

Ottimo articolo! Complimenti!
Bravo! Bell’articolo.
Immagino la prossima volta sperimenterai con qualche sensore, giusto?
Immagino uscirà una monografia anche su Raspberry Pi. O no?
Avete già in mente di cosa parlerete oppure no?
La monografia prima o poi uscirà… 🙂
Per il futuro, la regola è sempre la stessa: questa è una comunità Open Source quindi se avete delle idee, proponetele. 😀 😀 😀
Se volete lavorare voi stessi su un progetto, uno spazio dedicato per parlarne e proporvi, mettendovi in gioco (sul serio!) qui lo trovate di sicuro 😉
Dopodichè, Lucasss… dicci anche la tua, giusto per capirci meglio su che cosa/come/quando vuoi sperimentare 😉
Posso fare una proposta?
Perchè non un test sulla possibilità di generare forme d’onda dai pin di I/O?
Pensavo: si può utilizzare scilab su Raspberry per lavorare su ask e fsk?
Eccomi, scusate il ritardo ma sto constatando che in Sardegna i luoghi in cui è presente la copertura 3G si possono contare con una mano…
@Giorgio B.
Hai qualche sensore in particolare che vorresti utilizzare con Rpi?
Volendo si possono interfacciare con Rpi tutti quei sensori che non forniscono un segnale analogico in uscita, poichè Rpi è privo di convertitore ADC, ma nulla vienta in quel caso di utilizzare un ADC tra Rpi ed il sensore…
@Antonello
Che tipo di forme d’onda vuoi poter riprodurre con Rpi?
Allo stato attuale si è limitati alle onde quadre, poichè non vi sono convertitori DAC tra le periferiche di Rpi. Non ne ho trattato nell’articolo, ma le librerie WiringPi permettono di gestire un segnale PWM impostando frequenza e Duty, per poter magari muovere dei servi 🙂
A breve rispondo al resto 😉
io sto sperimentando collegando raspberry ad arduino per trasformare casa mia in una casa domotica, ora ho solo creato le schede con arduino e devo ancora montarle tutte. Poi le inserisco in ogni cassonetto e le collego con RS485 a Raspberry.
Mi piacerebbe che si parlasse della gestione della seriale e del database phpmyadmin, per poter interfacciare Raspberry e farlo diventare un server che gestisce sensori, rele, pulsanti attraverso una pagina web in php.
Complimenti a tutti per il lavoro
Buona giornata.
Davide
Salve…
In questo articolo ho spiegato come installare tutto il pacchetto LAMP che comprende anche mysql
it.emcelettronica.com/raspberry-pi-casa-domotica-e-videosorveglianza-gestibile-da-remoto-con-assistente-personale
PHP MY ADMIN è un pacchetto aggiuntivo per gestire i database mysql e può essere scaricato al seguente indirizzo ed inserito nella cartella www di apache del Raspberry Pi:
http://www.phpmyadmin.net/
Pensa che questo che ti ho detto possa bastare o preferiresti un piccolo articolo?
Propongo di sostituire “piccolo” con “corposo, sostanzioso e dettagliatissimo” 😀
Scusami ma intendevo piccolo nel senso semplice per me 😀
Comunque ebbene si, dettagliato completo e corposo 🙂
Molto interessanti gli articoli.
si potrebbe creare qualsiasi cosa, bisognerebbe fare un bel articolo corposo 🙂
Pensavo che il prossimo esperimento su questo argomento potrebbe essere proprio con i moduli Xbee di cui hai parlato.
Che ne pensi? 🙂
questo è interessante!
Salve, vorrei sapere se è possibile utilizzare anche l’I2S su raspberry, visto che mi piacerebbe sfruttarlo per applicazioni audio Hi-Fi. Grazie.