In questo articolo riporto un progetto svolto durante il corso di Azionamenti Elettrici terminato con la stesura di una relazione finale così suddivisa:
1) Introduzione: in cui si descrive brevemente la struttura dei motori in DC e in più si riportano i dati di targa del motore da analizziare.
2)Modello matematico del motore DC
3)Tecniche di controllo semplici
4)Tecniche di controllo avanzate
5)Asservimento di Posizione
6)Considerazioni Finali
Introduzione:
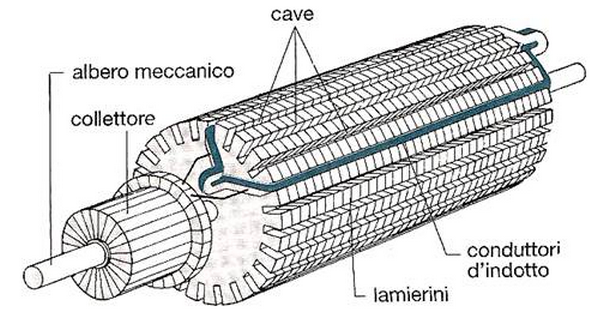
Il motore in corrente continua rientra nell'ambito dei motori elettrici utilizzati per gli azionamenti di tipo domestico ed industriale. Il motivo del suo grande successo è che, a differenza di altri tipi di motori, il suo controllo è estremamente semplice ed efficace. Nella seguente immagine possiamo apprezzare la sua struttura interna:
La parte rotante del motore è detta appunto rotore. Essa è caratterizzata da cave all'interno delle quali scorrono i conduttori che costituiscono l'avvolgimento rotorico. Questi conduttori, percorsi da corrente e investiti ortogonalmente da un campo magnetico, in virtù della legge di Lorentz, sono in grado di mettere in movimento il rotore. Tale campo magnetico può essere generato o da magneti permanenti o da avvolgimenti conduttori situati sulla struttura in ferro che abbraccia il rotore, detta statore.
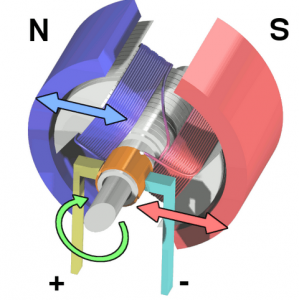
Analizziamo nel dettaglio il comportamento delle correnti e dei campi prodotti nella struttura:

Come possiamo vedere dalla figura sopra, l'ortogonalità tra la corrente percorsa dal conduttore e il campo magnetico che lo investe (prodotto dal magnete), genera una coppia magnetica che mette in rotazione la spira. La coppia è massima quando la spira è in posizione parallela rispetto alla direzione del flusso, mentre quando vi è la condizione di perpendicolarità, la coppia è nulla e la spira smette di ruotare.
Siccome a causa della rotazione del rotore non è sempre possibile avere la situazione in cui venga generata la coppia massima, è necessario introdurre un commutatore meccanico, detto collettore, che provvede a ripristinare la condizione di massima coppia. Ovviamente questo risultato lo si ottiene anche grazie ad una particolare realizzazione degli avvolgimenti.
Essi infatti vengono posti in modo tale che, di volta in volta, il collettore inietti la corrente in punti diversi. La corrente viene fornita al collettore tramite dei contatti striscianti, detti spazzole, costituiti di grafite.
Il collettore è costituito da tante lamelle metalliche affiancate ed isolate le une dalle altre.
Quando avviene il passaggio di conduzione da una lamella all'altra, la spazzola mette in corto circuito le due lamelle coinvolte. Visto che esse sono collegate agli avvolgimenti, che a loro volta sono di carattere induttivo, quando il corto circuito viene annullato, l'energia in essi immagazzinata viene scaricata, e ciò provoca il fenomeno dello scintillio.
Questo fenomeno tuttavia è di entità limitata, in quanto esso avviene in corrispondenza delle spazzole, posizionate sull'asse neutro del motore, dove le forze controelettromotrici vengono drasticamente attenuate. I flussi generati dalle correnti che percorrono gli avvolgimenti statorici fanno sì che l'asse neutro si sposti (tale fenomeno è detto reazione di armatura).
Poiché le spazzole non possono muoversi in maniera solidale all'asse neutro, occorre provvedere alla compensazione di tali flussi, affinché non si abbia lo spostamento dell'asse. Se ciò non venisse fatto, si potrebbe verificare la cortocircuitazione del collettore a causa della ionizzazione dell'aria circostante,causandone la distruzione. Questo fenomeno è noto come "flash" del collettore.
I dati di targa del motore analizzato in questa tesina sono i seguenti:
-Potenza Nominale: Pn = 2500 W
-Tensione di Armatura Nominale: Van = 250 V
-Perdite nel Circuito di Armatura: Pa = 4%Pn = 100 W
-Induttanza degli Avvolgimenti Rotorici: La = 5 mH
-Velocità Angolare Nominale: wn = 160 rad/s
-Tempo di Salita : tr = 1.2 s
-Potenza Necessaria per vincere l'attrito: Pb = 128 W
Da questi dati si possono ottenere tutti gli altri parametri necessari a descrivere il motore:
-Corrente Nominale: Ian = Pn/Van = 10 A
-Resistenza di Armatura: Ra = Pa/(Ia)^2 = 1 Ohm
-Forza Controelettromotrice Indotta:
Eg = (Pn-Pa)/Ian = 240 V
-Costante Kv : Kv = Eg/wn = 1.5
-Valore Nominale della Coppia : Cn = Pm/ wn = 15 Nm
-Costante Kt: Kt = Cn/Ian = 1.5
-Momento di Inerzia : J = Cn*tr/wn = 0.1125 Nms^2/rad
-Coefficiente di Attrito Viscoso: B = Pb/wn^2 = 5*10^-3 Nms/rad
LINK degli articoli in ordine sequenziale:
i links saranno attivi successivamente alla pubblicazione dei relativi articoli che avverrà nei prossimi giorni
1)Controllo di un motore in corrente continua. Analisi e progetto con Matlab/Simulink
2)Modello Matematico di un motore DC e sua implementazione in Simulink
3)Controllo di velocità per un motore DC
4)Controllo di velocità con azione di Feed-Forward e Controllo di Posizione.



I link 3 e 4 non funzionano, dove posso trovare gli articoli?
Grazie per la segnalazione, link aggiornati.
La potenza nominale di un motore elettrico è la potenza meccanica utile fornita all’asse; per poter calcolare la corrente assorbita è necessario conoscere la potenza elettrica assorbita dalla rete, che è legata alla potenza meccanica utile dal rendimento della macchina.
Salve, come si dimensionato il numero di cave e il numero di lamelle del collettore? Sapete se esiste un manuale o una documentazione per il dimensionamento? Grazie mille!