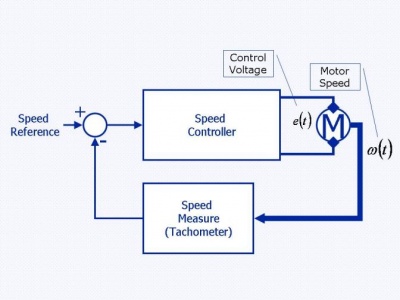
In questo articolo proseguiamo il progetto del controllore "pid" utilizzando un'ulteriore tecnica detta "azione in avanti" o feedforward. Inoltre, viene mostrato uno schema alternativo per realizzare anche un asservimento di posizione che come vedremo risulterà privilegiato rispetto al controllo di velocità.
Le prestazione ottenute, sebbene già soddisfacenti, possono essere ulteriormente migliorate attraverso un’azione in avanti.
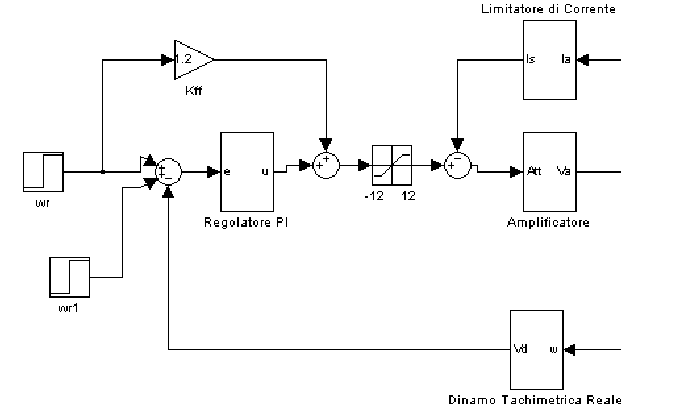
Tale azione permette di rendere l’azione integrale meno onerosa, in quanto, fornendo all’amplificatore direttamente il segnale di riferimento (opportunamente pesato con un coefficiente Kff), il regolatore dovrà fornire solo una piccola aliquota del segnale di attuazione relativa alle variazioni. Il circuito complessivo si modifica nella maniera seguente
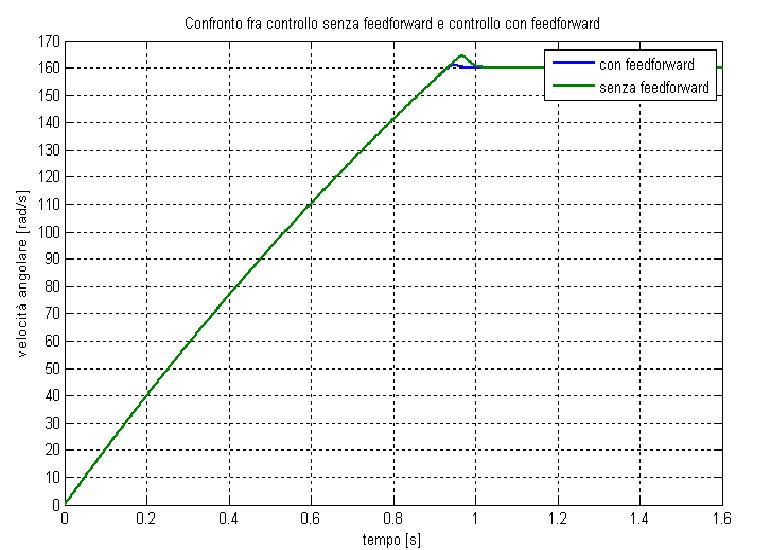
Come si evince dal grafico sottostante, l’azione di feedforward migliora le prestazioni del motore nei riguardi della velocità angolare:
Tale miglioramento è tuttavia presente solo in corrispondenza di forti variazioni delle condizioni di funzionamento del sistema. Infatti, come si evince dai successivi due grafici, il comportamento mostrato dal sistema non presenta variazioni significative nel caso di una sollecitazione di lieve entità, o di un disturbo agente in catena diretta.


Il miglioramento introdotto dall’azione di feedforward diventa ancora più efficace nel funzionamento a basse velocità del motore. Nella seguente simulazione il segnale di riferimento è pari a 0.8 V, al quale corrisponde una velocità angolare di 16 rad/s:

ASSERVIMENTO DI POSIZIONE
Oltre al controllo della velocità, in alcune situazioni è necessario eseguire anche un controllo della posizione. Lo schema adottato per effettuare tale controllo è il seguente:
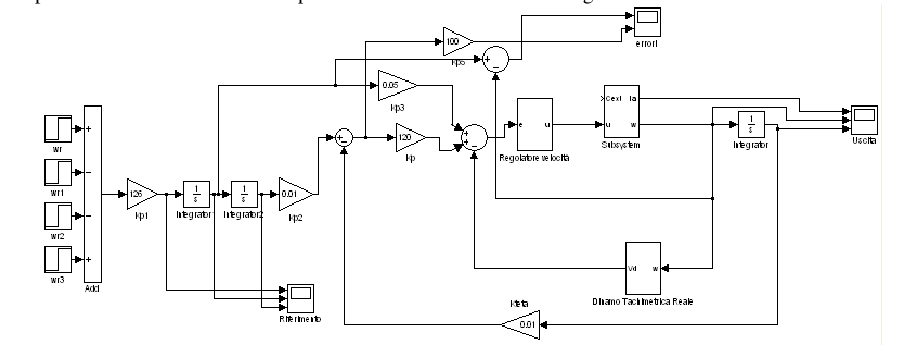
Come si vede nella figura, allo schema già realizzato per il controllo di velocità, viene aggiunta un’ulteriore catena di retroazione, preceduta da un integratore che rappresenta il legame matematico che lega posizione e velocità angolare. Per quanto riguarda il regolatore di posizione, è stato scelto un semplice regolatore proporzionale. Nei seguenti grafici sono presentati i riferimenti di accelerazione, velocità e posizione angolare.

Per la scelta del Kp2 (ovvero il guadagno dell’azione proporzionale esterna), abbiamo analizzato il comportamento del sistema al variare di tale guadagno, andando a valutare in particolar modo l’errore di posizione e l’errore di velocità.
Si è notato che, all’aumentare del Kp2, le prestazioni del sistema diventano inizialmente migliori, per poi peggiorare a causa dello spostamento dei poli nel semipiano destro del piano complesso. Abbiamo scelto cinque valori del Kp2 con i quali effettuare le simulazioni e abbiamo ottenuto i seguenti risultati:


La situazione peggiore si ha con Kp2 = 200. In corrispondenza di tale valore il sistema è diventato instabile, ossia i poli della funzione di trasferimento sono diventati a parte reale positiva e quindi si verifica la condizione di instabilità. Detto ciò nella successiva analisi eviteremo di graficare i risultati ottenuti con tale valore del Kp2.
I seguenti grafici rappresentano uno zoom dei due grafici precedenti, in modo da poter valutare meglio le prestazioni.
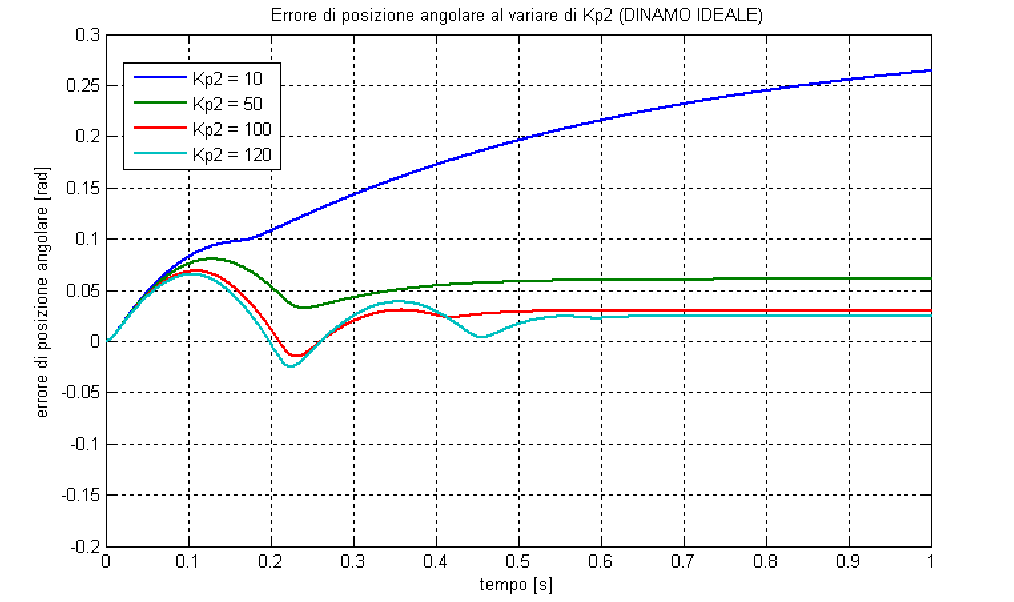
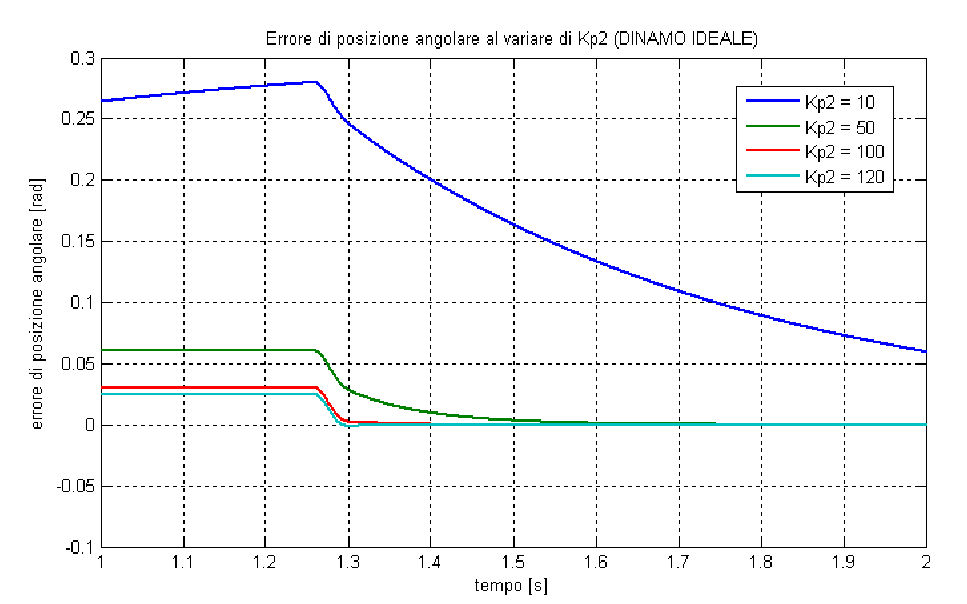


Dall’analisi dei grafici, si nota che i migliori valori tra cui effettuare la nostra scelta sono: Kp2 = 100 (in rosso) e Kp2 = 120 (in azzurro). In corrispondenza del primo si ottiene una migliore prestazione in velocità, caratterizzata da minori oscillazioni, mentre in corrispondenza del secondo si ottiene una migliore prestazione in posizione a discapito dell’errore di velocità.
Nell’effettuare la nostra scelta abbiamo preferito privilegiare la precisione in posizione piuttosto che quella in velocità, per cui abbiamo scelto il valore di Kp2 pari a 120. Tale scelta è ovviamente arbitraria e sicuramente dipende dall'applicazione finale in cui si vuole utilizzare il motore.
Come si vede dai grafici successivi con tale valore del parametro il sistema segue perfettamente il riferimento di posizione imposto.

Anche se avevamo previsto un errore in velocità maggiore di quello di posizione, il sistema riesce a seguire in maniera soddisfacente il riferimento di velocità:

Per quanto riguarda la corrente, si è riscontrato che la specifica sul ripple è sempre rispettata in ogni condizione di funzionamento del sistema:

Questo articolo è parte di una tesina sul controllo di un motore in corrente continua. Analisi e progetto con Matlab/Simulink
