
Questo articolo descrive la realizzazione di una ortesi attiva indirizzato a bambini e ragazzi affetti da paralisi cerebrale infantile. Il prototipo è stato costruito durante il progetto PACIS presso il laboratorio Altair. L’idea alla base è quella di realizzare una macchina riabilitativa efficace e semplice.
Gli attuali prodotti di robotica riabilitativa sono infatti sistemi complessi, ingombranti e ad alto costo. Per questo motivo l’uso è condiviso tra più pazienti, il che rende i trattamenti costosi e, dal punto di vista del singolo paziente, dilazionati nel tempo. Studi clinici hanno recentemente dimostrato che l’efficacia di strumenti robotici per la reabilitazione è paragonabile a quella della terapia manuale. Nella mia opinione di progettista ciò significa che la sfida attuale è quella di trasferire i benefici in macchine a basso costo ed alta usabilità per un futuro in cui ogni disabile motorio possa avvalersi di trattamenti intensi e di lungo periodo con un costo sostenibile dalla sanità pubblica. Questo rappresenta una opportunità di benessere per i pazienti e per le loro famiglie nonchè una nuova frontiera per la ricerca e un nuovo potenziale di sviluppo fortemente tecnologico per la nostra economia.
Attualmente lo sviluppo della macchina, nella generalizzazione dei suoi principi, sta proseguendo nell’attività di ricerca del Laboratorio Altair presso l’Università degli Studi di Verona.
Si consiglia di visionare questo video prima della lettura.
Motivazioni
I pazienti affetti da Paralisi Cerebrale Infantile (PCI) possono soffrire di difficolta` motorie che rendono la camminata faticosa o addirittura impossibile (livello III, IV e V secondo la classificazione GMFCS). Lo spostamento autonomo viene raggiunto solo se il bambino/ragazzo può imparare ad utilizzare una carrozzina elettrica. In sostituzione alla carrozzina, in alcuni casi vengono utilizzate delle ortesi passive che permettendo la postura eretta possono facilitare la deambulazione. La maggior parte dei pazienti però non riesce a raggiungere una camminata autonoma con questo strumento e per la terapia o l'allenamento è sempre necessaria la figura di un terapista che guidi il paziente attivando manualmente la deambulazione.
Progettazione
Il lavoro svolto ha incluso le seguenti fasi: uno studio sullo stato dell’arte dei sistemi ortotici/esoscheletri, la valutazione dell’offerta commerciale in termini di componentistica, lo studio delle difficoltà motorie legate alla PCI, la progettazione meccanica e la realizzazione dei pezzi, la progettazione e la realizzazione elettronica ed infine, lo studio e la sperimentazione degli algoritmi software per il controllo e la pianificazione della coppia.
L'elemento fondamentale che ha guidato la progettazione è stato il concetto di ortesi non coercitiva, ovvero che non forza né si sostituisce, ai i movimenti del paziente ma che risponde ai suoi stimoli cercando di comprenderne le intenzioni e facilitare l’esecuzione del movimento, instaurando così una relazione positiva stimolo-azione nell’apparato sensori-motorio del paziente. Il risultato della progettazione è rappresentato in Figura 1.

Figura 1: l’ortesi attiva sviluppata
Presentazione del Prototipo
Il prototipo dal punto di vista meccanico si compone di una ortesi passiva commerciale, denominata NF-Walker e caratterizzata da un’insieme di deambulatore su quattro ruote con un sistema ortesico coscia gamba piede dotato di una reciprocazione meccanica degli arti inferiori, tramite funi elastiche o rigide.
Il sistema di attuazione è basato su attuatori pneumatici (pneumatic artificial muscle - PAM) che sono stati scelti per le loro caratteristiche di cedevolezza, sicurezza, alto rapporto peso potenza e costo contenuto. Si tratta di attuatori che presentano una elasticità intrinseca (che in inglese viene spesso definita "compliance") e per questo particolarmente indicati nell'interazione uomo-robot. In questo prototipo gli attuatori sono montati sul giunto dell’anca per favorirne la flessione, dal momento che questo giunto è quello che, nei soggetti selezionati, fornisce il maggior contributo all’attivazione propulsiva del movimento. Il momento flessorio generato dal lato attuato si trasferisce all’arto in appoggio attraverso il sistema di reciprocazione dando luogo così all’avanzamento.
Per il controllo e la modulazione della potenza prodotta è stata impiegato un algoritmo di controllo basato su rete neurale artificiale che processa l’informazione proveniente da diversi sensori: potenziometri rotativi per la posizione angolare sugli snodi di anca e ginocchio, celle di carico monoassiali per misurare e controllare la forza dell'attuatore, economici sensori resistivi di forza nelle suole delle scarpe per identificare le forze di reazione al terreno.
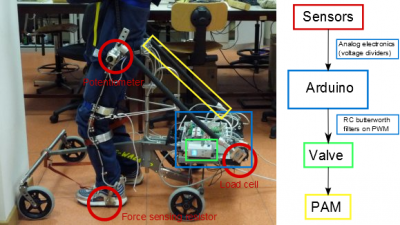
Figura 2: L'ortesi indossata dal nostro paziente, Tommaso.
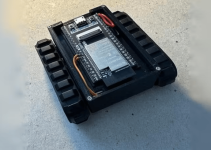
L’algoritmo di controllo è stato implementato sulla piattaforma arduino MEGA la quale è stata interfacciata con i vari sensori mediante semplici circuiti (partitori elettrici) e con delle valvole pneumatiche proporzionali mediante una linea analogica (ottenuta tramite filtraggio RC a due stadi) del segnale pwm. Per alloggiare l’elettronica sono state prodotte due schede a partire dal layout di arduino MEGA.
Il sistema di gestione automatica si divide concettualmente nel layer di pianificazione del profilo di coppia, ad un livello più alto, e nel layer di controllo in senso stretto che ha il compito di fare generare la coppia pianificata mediante la parzializzazione dell’aria operata dalla valvola. Le prossime due sezioni sono appunto dedicate alla descrizione di queste due componenti.
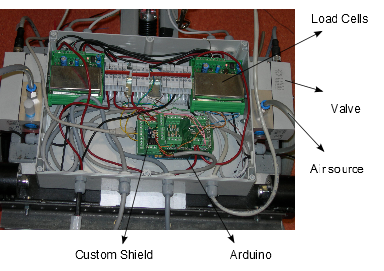
Figura 3: L’elettronica
Il Sistema di Controllo
Come accennato il sistema è basato su muscoli artificiali pneumatici. Questo tipo di attuatore è costituito da un serbatoio di forma cilindrica allungata formato da una camera d’aria in gomma deformabile avvolta esternamente da un nastro di guaina intrecciato deformabile radialmente ma non assialmente. Incrementando la pressione interna il diametro dell'attuatore risulta espandersi provocando un accorciamento del muscolo. Purtroppo a causa della dinamica non lineare di questi attuatori il loro controllo ha presentato in generale molte difficoltà. Infatti i sistemi di controllo classici (PID, reti compensatrici) non funzionano adeguatamente su questo attuatore e inoltre non è ancora disponibile una modellazione fisica. Lo schema di controllo che abbiamo proposto è un loop di forza basato su una rete neurale che dati l'allungamento del muscolo e la forza da esercitare fosse in grado di stimare la pressione necessaria all'interno del muscolo, fornendo una risposta sufficentemente reattiva. Rimandiamo a [1] e [2] per i dettagli tecnici sull’algoritmo di controllo proposto e sulle performances ottenute.
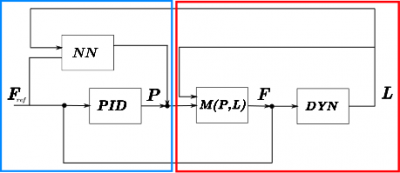
Figura 4: L'architettura del sistema di controllo. La rete neurale (NN) predice dei valori di pressione P (interna all'attuatore) per ottenere la forza desiderata, in parallelo un controllore a basso guadagno di tipo PID processa l'errore di forza e stabilizza il sistema che è composto dal muscolo pneumatico M e dalla dinamica DYN del sistema mecanico e umano. Fref rappresenta la forza desiderata, F la forza reale applicata e L la lunghezza del muscolo artificiale. La linea blu racchiude gli elementi software che interagiscono con la realtà fisica racchiusa dalla linea rossa.
La pianificazione della coppia
Una volta progettato il sistema di controllo è necessario pianificare le traiettorie di coppia da sviluppare ai giunti dell’anca per facilitare la camminata del paziente. In pratica basandosi sui segnali provenienti dai sensori (forze di reazione e posizioni angolari) e sulla conoscenza a priori del sistema (cinematica e dinamica) la pianificazione calcola istante per istante la coppia ai giunti dell’anca.
Volendo costruire un sistema non coercitivo, che si adatti alla volontà del paziente è necessario innanzitutto conoscere lo stato attuale del paziente, la fase del ciclo del cammino in cui egli si trova. Perciò abbiamo progettato un algoritmo per il riconoscimento della gait phase basato su una macchina a stati finiti (MSF) le cui transizioni sono determinate dagli input dei sensori e dalla dinamica dell’arto inferiore. Basandosi sullo stato della MSF vengono attivate o deattivate due tipi di azioni assistive. La prima di esse è la compensazione di gravità che agli occhi del paziente permette di ‘alleggerire’ il peso della gamba e ciò può essere molto utile quando lui decide di alzarla ma risulta controproducente nel momento dell’abbassamento. La seconda azione assistiva si basa sul fatto che quando il paziente vuole alzare la gamba destra appoggia il suo peso sulla sinistra e viceversa. Grazie a questo semplice principio è possibile fornire una coppia che favorisce l’attivazione el movimento che è la fase più difficoltosa in quanto mancano favorevoli azioni d’inerzia. Si Una descrizione esaustiva dell’algoritmo di pianificazione è presente in [1] e [3].

Figura 5: Primo banco prova per la pianificazione della coppia ed il sistema di controllo
Risultati Ottenuti
In questa sezione sono presentati i risultati ottenuti sul trattamento di un singolo caso di studio. Prima dell’utilizzo del prototipo, il paziente, un ragazzo di 16 anni, di 60 kg di peso con totale incapacità di deambulazione, proveniva da due anni di terapia con l’ortosi passiva (stessa struttura meccanica priva di attuatori muscolari ). L’utilizzo dell’ortosi era però subordinato alla presenza di un aiuto esterno. Era necessario, infatti, che il terapista aiutasse il paziente tirandolo per la mano per ottenere una camminata che tendeva rapidamente ad esaurirsi non appena la mano era lasciata. Inoltre la fluidità dei movimenti era contrastata per l’effetto della rigidità muscolare e conseguentemente l’escursione articolare appariva limitata nel ROM (range of movement) così come l’angolo di flessione dell’anca.
Dopo circa dieci ore di training con l’ortosi attiva, divise in più sessioni, la prestazione del paziente era molto migliorata. Tale tempo è stato necessario impiegato dal paziente per adattarsi al nuovo sistema. In particolare nelle sessioni finali il paziente esibiva una camminata completamente autonoma, movimenti più fluidi (adeguata attivazione di muscoli agonisti ed antagonisti in opposizione di fase) e maggiore flessione dell’anca ovvero era riuscito a includere il prototipo per migliorare la sua performance in modo chiaramente visibile.
Aspetto interessante di cambiamento nella strategia riabilitativa è stato delineato dalla possibilità di interfacciarsi con gli strumenti di apprendimento del controllo del movimento basati sulla rappresentazione sensori motoria. Infatti nella pratica è il paziente che ‘guida’ il prototipo ovvero il piano d’azione è deciso dal paziente e non imposto dall’esterno. Il paziente ha una certa azione ed il prototipo ha una reazione, in modo da cercare di avvantaggiare la camminata. Possiamo dire che né il paziente né l’ortosi sono in grado di camminare ma il movimento nasce dalla loro interazione, dove la guida è il paziente. Il paziente si muove, l’ortosi ‘sente’ il movimento e calcola la coppia assistiva. Questa è a sua volta percepita dal paziente così entrando nel suo loop senso-motorio.
Si rimanda a [1] e [3] per maggiori dettagli tecnici sui dati raccolti in merito a defaticamento, reclutamento muscolare e stimolo dei circuiti sensori motori. Un video divulgativo sui risultati ottenuti è presente qui.
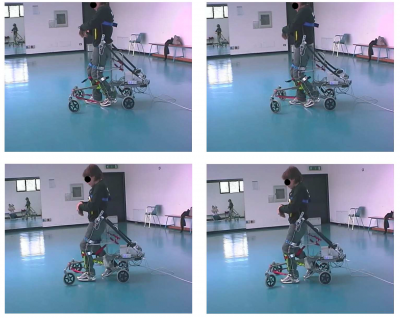
Figura 6: Sequenze di deambulazione assistita
Ringraziamenti
Questo lavoro è stato possibile grazie al coinvolgimento di più persone che desidero ringraziare. Il prof. Paolo Fiorini, il Dott. Alessandro Cosentino, il collega Stefano Piazza, Roberto Sgaravato, Valeria Marconi, Davide Conte, Mirco Bendinelli, Francesca Pinto e Mauro Recalcati. Per ultimo e più importante Tommaso e la sua famiglia.
Referenze
[1] A. Calanca, S. Piazza, and P. Fiorini. “A motor learning oriented, compliant and mobile Gait Orthosis,” Applied Bionics and Biomechanics, 2012.
[2] A.Calanca, S.Piazza, P.Fiorini. Force Control System for Pneumatic Actuators of an Active Gait Orthosis. IEEE BIOROB 2010 International Conference. September 26-29, 2010 . Tokyo, Japan.
[3] A.Calanca, S.Piazza, P.Fiorini, A.Cosentino. An Active Orthosis For Cerebral Palsy Children. 1st International Conference on Applied Bionics and Biomechanics. October 14-16, 2010. Venice, Italy.
[4] A.Calanca, S.Piazza, P.Fiorini, A.Cosentino. A Prototype for Hip Compliant Actuation. XI Congresso Nazionale Società Italiana di Analisi del Movimento in Clinica. October 4-7, 2010. Ferrara, Italy
[5] N. Smania et al. “Applicability of a new robotic walking aid in a patient with cerebral palsy,” European Journal of Physical and Rehabilitation Medicine, vol. 47, no. 0, pp. 1-7, 2011.
Allegati:
- Walker1 e Walker2 .zip -> bozza di articolo in italiano per approfondire la parte di tecnica di controllo e pianificazione. In pratica riassume i contenuti di [1],[2] e [3] fatta eccezione per i risultati clinici. Essendo il file >1MB è neccessario rinominare WalkerX.zip in Walker.zip.00X per X = {1,2}.
- Walker_v6.zip: versione "in progress" del software che permette all'ortesi di funzionare.
- eagle.zip: sono i files di progettazione eagle (board & schematics) della parte elettronica che sostanzialmente si compone di partitori, buffer e filtri RC. Tali file sembrano non compatibili con l'ultima versione di Eagle.



Concordo pienamente con quanto sopra.
Una possibile evoluzione potrebbe essere l’implementazione di un autoapprendimento?
Nel senso che il sistema adatta la coppia generata, non solo al movimento, ma anche alla persona, basandosi, ad esempio, su vari fattori, alcuni fissi (pre-impostati) come ad esempio il programma di riabilitazione, altri fattori invece dinamici (in real-time) come ad esempio l’energia del paziente relativamente al tempo di deambulazione, ma anche la forza impiegata in alcuni movimenti piuttosto che altri e quindi regolare di conseguenza l’intervento.
Si riuscirebbe per esempio a comprendere se viene fatta più fatica con un movimento piuttosto che con un altro ed anche ad adattarsi sulla stanchezza fisica accumulata durante il movimento.
Non sono esperto della situazione, mi permetto solo di proporre nuove idee che ovviamnete dovranno essere valutate a livello medico.
Tecnicamnete però posso dire che forse una piattaforma hardware più performante potrebbe essere necessaria. Arduino Due (quando uscirà) oppure schede con processori a 32bit (arm ad esempio)
Caro DiegoR,
ringrazio te per il commento. Fare ricerca su tematiche socialmente utili è di per se gratificante perché in mezzo al mare di tecnologia superflua ti rendi conto che (forse) stai facendo qualcosa che serve. Poi quando arrivano questi commenti la motivazione sale ancora di più.
Ciao Emanuele,
L’adattività è un tema cardine per questo tipo di robotica ed è una della cose sulle quali sto lavorando adesso. Più importanti ancora sono la versatilità e l’efficienza. Ad esempio il sistema di controllo di coppia ha una determinata risposta in conseguenza alla dinamica del paziente ovvero, se io ci metto un bambino + piccolo la risposta sarebbe sicuramente oscillante mentre con un adulto sarebbe + lenta. Questo è un primo livello di adattività. L’efficienza invece ovviamente riguarda la durata delle batterie.
Anch’io da tempo sono in attesa di arduino 2 e soprattutto del motor shield 2, anche se penso che dal punto di vista del motion ci siano soluzioni + attraenti. Noi ad esempio ci stiamo dirigendo sui controllori Elmo Harmonica, che integrano in pochissimo spazio ance l’elettronica di potenza.
L’adattività nella pianificazione di coppia invece può essere pericolosa. Quando uno deve avere una validazione clinica è necessario generare comportamenti semplici e sempre uguali su ogni paziente. La mia idea che l’adattività nella pianificazione di coppia possa introdurre rumore sui dati clinici, almeno in una fase iniziale! Ad esempio in un soggetto sano può andare bene minimizzare l’energia ma in uno patologico può essere che per ottenere una camminata ficorretta il paziente debba sforzarsi di più. E’ un anbito di ricerca davvero molto nuovo e molto c’è da ancora da fare. Per gli interessati potete guardare il video di Hugh Herr, doppio amputato e prof del M.I.T uno dei guru del settore. E’ quello che ha creato le protesi di pistorius.
Bellissimo il progetto anche perchè io che sono il papà di un bambino con problemi di deambulazione sto cercando tutti i modi per potergli dare l’autonomia e non metterlo in carrozzella come vorrebbero fare tanti (così sono più facili da sposatare).
Chiedevo una possibile evoluzione in esoscheletro in quanto per esperienza diretta su mio figlio con un deambulatore autocostruito da 10,00€ sono riuscito a fargli fare cose egregie, ma serve sempre un adulto che lo sorregga. Con il carrello per la deambulazione ha trovato sempre difficoltà sia per l’ingombro che di fronte alle scale, dove questi sfortunati si bloccano, e ahimè quante scale ci sono ancora al mondo.
Andrea, per il lavoro che stai facendo questi Angeli ti ringraziano.