In quasi tutte le piccole grandi applicazioni robotiche c'è la necessità di "azionare" motori elettrici per il movimento del robot, quale per esempio quello relativo alle braccia meccaniche, oppure meccanismi di pan & tilt, posizionatori e numerosi altri. Ogni tecnologia costruttiva di motori elettrici richiede un particolare tipo di "pilotaggio", un motore in corrente continua a spazzole può essere messo in rotazione semplicemente fornendo tensione continua sufficiente ai suoi morsetti, mentre per un motore di tipo brushless tutto ciò non basterà. L'oggetto che si interpone tra motore e "intelligenza" viene chiamato driver e, in questo articolo, dopo aver discusso e illustrato qualche nozione generale, ne verranno presentati ed analizzati tre in particolare: l'Arduino Motor Shield R3 , il Pololu Dual MC33926 (versione adattata per Raspberry Pi) e il TB6612FNG della Sparkfun.
Introduzione
L'interfaccia in ingresso ad un driver motori ha il compito di comunicare al motore le funzionalità desiderate, rispettando i limiti delle capacità circuitali e del cinematismo (Figura 1). La logica interna al driver elaborerà la nostra richiesta fornendo in output dei segnali adatti a pilotare il generico stadio di amplificazione che per esempio, potrebbe essere un comune "ponte-H". Lo stadio di amplificazione, a sua volta, "reimpasterà" le grandezze elettriche in ingresso dall'alimentazione: tensione, frequenza, corrente ecc. e le trasformerà opportunamente per pilotare il motore elettrico collegato alla sua uscita. Il motore potrebbe, se necessario e se supportato dal driver, fornire dei segnali di feedback al driver tramite dell'opportuna sensoristica, per esempio: finecorsa, encoder, effetto Hall ecc. ecc.
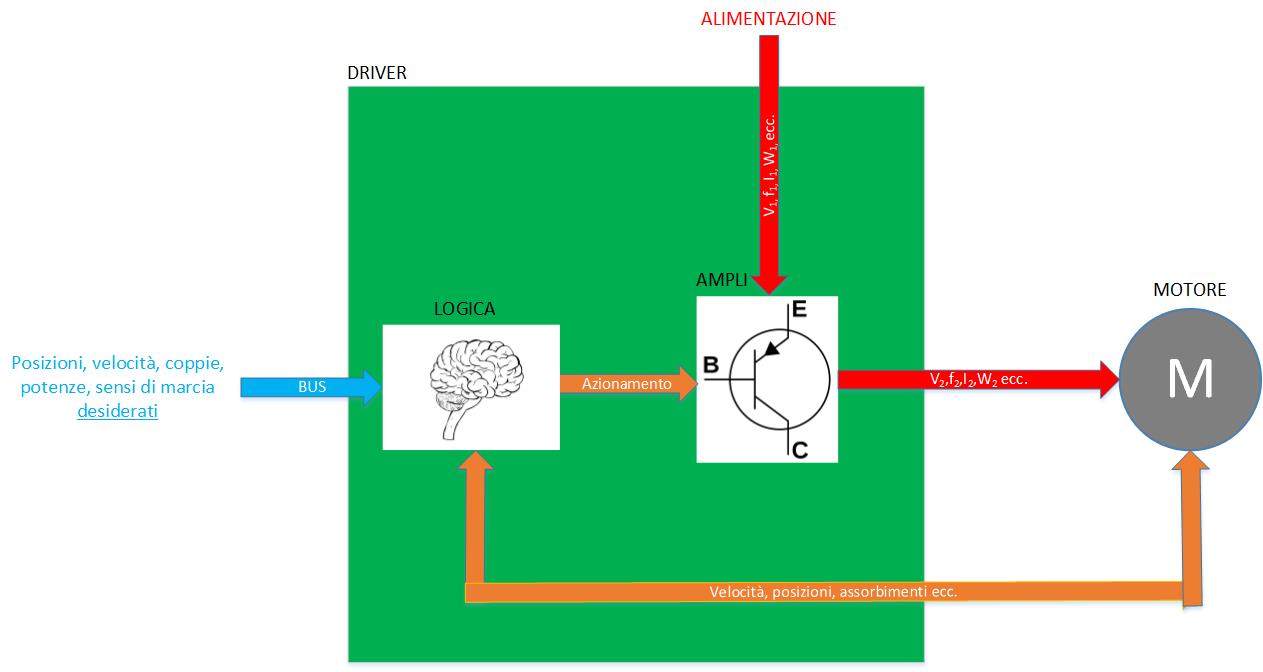
Figura 1: Schema a blocchi di un generico driver motori.
I motivi per i quali può essere conveniente/necessario un driver motori opportuno sono i seguenti:
- solitamente l'oggetto che gestisce la logica (microcontrollore, PLC, PC ecc. ecc.) non è in grado di pilotare direttamente un motore (in primis) per le grandezze elettriche in gioco. Per esempio, solitamente un GPIO (General Purpose Input Output) di un microcontrollore può "erogare" al massimo 15mA e una tensione che non supererà quella di alimentazione dello stesso (5V, 3,3V), quindi, come farà per esempio a pilotare un motore avente per tensione di funzionamento 12V e una corrente assorbita nominale di 1A? Si rischierebbe di bruciare il microcontrollore.
- A volte, nei driver motori più "smart", sono già implementati controlli di coppia, velocità e altre grandezze fisiche legate al motore e al suo cinematismo, quindi, tramite la logica, dovremo [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2134 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.


Molto interessante questo articolo, si possono realizzare molti progetti ad esempio nella marcatura o codifica industriale, dove i prodotti che necessitano una marcatura laser dinamica o statica, o per marcatura dinamica a getto di inchiostro, si possono comandare delle movimentazioni dedicate, con motori a corrente continua .
Grazie per l’interesse!