La piattaforma Openpicus rilascia oggi gratuitamente scaricabile la nuova IDE 2.0. E' decisamente un grande passo avanti rispetto alla precedente in quanto sono state integrate moltissime novità richieste dalla comunità degli sviluppatori.
In primis c'è un ambiente più veloce in compilazione e ottimizzato. Poi la possibilità di creare templates di progetto e di poterli salvare e condividere. Un monitor seriale è stato integrato oltre alla possibilità di verificare la dimensione in memoria della propria applicazioni.
Scaricate subito da qui
http://www.openpicus.com/cms/index.php?option=com_content&view=article&id=57&Itemid=53


Lo scarico e lo provo subito, così facendo posso subito avanzare le mie conisiderazioni sulle eventuali migliorie apportate nell’IDE versione 2…Disponendo infatti della scheda FlyPort, non vedevo l’ora che uscisse la seconda release dell’ambiente di sviluppo, perchè?? Perchè ho notato che la prima versione presenta problemi in fase di compilazione se installato sotto WINXP sp3…infatti a volte si blocca e ci mette troppo a compilare il codice…che questo bug sia stato risolto nella seconda versione?? lo provo e vi saprò dire!!
anche se non l’ho detto nel mio primo commento, aver aggiunto all’IDE tool come il monitor seriale integrato e il visualizzatore di quanta memoria programma sia stata occupata credo che rappresenti davvero una rivoluzione dell’IDE stesso.Nella programmazioine dei microcontrollori (PIC o altri) con linguaggi ad alto livello come il C, tenere sott’occhio l’occupazione di memoria è molto importante perchè permette di valutare quale soluzione software è più ottimizzata rispetto ad un’altra a prima vista equivalente. Per dirvi, con i compilatori della Microchip della serie C18 o C32, un ciclo costruito con il costrutto for è meno ottimizzato dello stesso ciclo costruito con il while o il do while (o viceversa, ma la differenza tra i due costrutti c’è) e questo lo si evince proprio osservando all’ammontare della memoria programma (ma anche dati) utilizzata in fase di compilazione del codice. Inoltre, essendo il Flyport munito di comunicazione UART tramite la quale è possibile eseguire il debug TCP (praticamente vengono restituiti dei messaggi indicanti i passi di instaurazione della comunicazione TCP), un monitor seriale integrato non può che far comodo. Io ad esempio, per monitorare lo stato della connessione tramite il TCP debug, mi avvalevo dell’Hyperterminal di windows opportunamente configurato… Ora con il nuovo ide tutto dovrebbe essere più semplice senza che ci sia il bisogno di saltare da una finestra di windows all’altra… 😉
Nemmeno questo programma lo conosco! Alex, vedo che sei abbastanza eseprto..mi spieghi i suoi utilizzi? 😉
Due domande. Il compilatore C incorporato e’ gratutito? Ci sono limitazioni sulla dimensione del codice scritto in C?
brazov
Leggendo nella pagina linkata nell’articolo il compilatore C usato è quello di microchip. Se non sbaglio però ha un pò di limiti. Infatti microchip vende il suo compilatore C migliore e lascia gratuito quello standard. Un raffronto tra i due compilatori puoi trovarlo qua
http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en534868&redirects=c30
Quello che ti ho detto trova conferma sul sito di microchip
“The Lite compilers are freeware compilers provided as a low-cost tool for all purposes. These compilers have no time or memory limitations, however most code optimizations will be restricted.”
Il compilatore usato da openpicus comunque è il C30 nella sua versione free, quindi dovresti poter stare tranquillo…
Il compilatore lo puoi scaricare da qua
http://ww1.microchip.com/downloads/en/DeviceDoc/MPLABC30Combo_v3_24Lite.zip
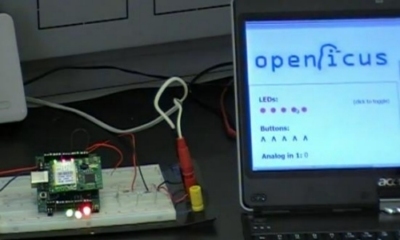
Guarda ti spiego. Un paio di mesi fa, nell’ambito dell’iniziativa Review4U (altra splendida iniziativa promossa da Elettronica Open Source) mi sono aggiudicato la scheda di sviluppo Flyport, progettata dal team OpenPicus. Insieme a Flyport ho ricevuto anche la scheda detta “Nest” (nido) attraverso la quale si riesce ad ottenere uno starterkit completo. Dell’intero kit di sviluppo, non so quando, ne verrà pubblicata una recensione a mio nome. Flyport + Nest rappresentano tutto il necessario per sviluppare un webserver su microcontrollore PIC (e quindi in stile Microchip) al quale si ha accesso tramite una connessione WiFi secondo lo standard 802.11b/g/n. I link di riferimento ai quali ci si può riferire sono i seguenti:
per maggiori informazioni sul modulo Flyport: http://www.openpicus.com/cms/index.php?option=com_content&view=article&id=46&Itemid=60
mentre sulla scheda Nest è possibile consultare la seguente pagina web tratta dal sito ufficiale OpenPicus:
http://www.openpicus.com/cms/index.php?option=com_content&view=article&id=62&Itemid=99
Trattandosi anche questo di un progetto Open Source, gli sviluppatori mettono a disposizione sul sito tutta la documentazione per la replicazione hardware sia della scheda Flyport che della USB Nest.
La cosa interessante di questo modulo è che viene distribuito con un bootloader precaricato che permette di programmare il PIC a bordo del Flyport senza per forza dover disporre di un qualche programmatore Microchip. Detto ciò come premessa, passo ad esporti l’IDE oggetto dell’articolo.
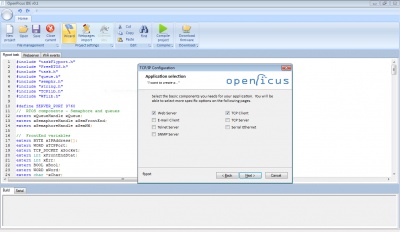
OpenPicus IDE (nel caso dell’articolo alla versione 2.0) integra tutto il necessario (e questa volta nel vero senso dell’espressione, dato che la versione 1.0 sembrava essere ancora una versione beta di prova) per poter configurare in maniera molto semplice lo stack TCP/IP di Microchip che gestirà il webserver e in più permette di scrivere il proprio codice in linguaggio C successivamente compilato tramite il compilatore C della Microchip denominato C30 (credo nella versione Lite). Tutto questo nel modo più semplice possibile. Infatti i passi essenziali per sviluppare applicazioni con Flyport sono essenzialmente tre: si configura lo stack TCP/IP secondo quelle che sono le proprie esigenze di configurazione attraverso un wizard guidato (davvero molto semplice e immediato); si carica la pagina web che si vuole integrare nel codice (la pagina web viene tradotta in file .s che è il formato di conversione attuata da un tool della Microchip denominato MPFS2, e il 2 sta ad indicare la versione di http supportata)…questa operazione è tanto semplice quanto premere un tasto, ricercare il percorso della cartella relativa al progetto della pagina web, e premere un ulteriore tasto di conferma e conversione; scrivere il proprio codice in linguaggio C sia per la gestione del server e quindi delle variabili dinamiche e dei metodi “get” e “post” secondo quanto previsto dalla stessa microchip in alcune application notes relative allo stack TCP/IP proprietario, sia per gestire le varie periferiche del modulo . Tutto dunque molto ma molto semplice e immediato da implementare.
L’unica pecca che lamentavo della versione 1.0 consiste nella lentezza, a volte, nel compilare il progetto fino addirittura ad arrivare a bloccarsi il tutto. Questo per Windows XP sp3. È probabile che sotto altri sistemi operativi il problema non sussiste (dubito vivamente, visto che xp è ancora reputato come l’ultimo sistema operativo windows ancora sufficientemente stabile prima dell’uscita di windows Vista).
Grazie Alex e Giovanni per i loro commenti, sono molto utili.