debug:
FlexRay è un bus automotive relativamente nuovo che è stato sviluppato da un gruppo di compagnie leader nell’industria automotive e nelle forniture, noto come FlexRay Consortium. Siccome le macchine diventano sempre più intelligenti e l’elettronica trova ormai posto in un …
Diversamente da altri standard trattati in questo documento, presenti nel mercato da decenni, gli standard MIPI (mobile Industry Processor Interface) sono relativamente nuovi e, in alcuni casi, ancora in evoluzione. La MIPI Alliance (www.mipi.org) ha completato differenti specifiche che sono …
I2S, o I al quadrato S, sta per Inter-IC Sound ed è un bus sviluppato dalla Philips a metà anni ’80 per fornire un percorso di comunicazione standardizzato per segnali audio digitali in dispositivi elettronici come le Tv digitali o …
L’USB, Universal Serial Bus, è diventato un’interfaccia dominante per i moderni personal computer, sostituendo molti dei bus esterni seriali e paralleli usati in precedenza. Sin dalla sua introduzione nel 1995, USB è cresciuto oltre il suo originale utilizzo ed è …
I2C, o I quadro C, sta per Circuito Inter Integrato. Fu originariamente sviluppato da Philips all’inizio degli anni ’80 per fornire una modalità a basso costo per connettere i controller ai chip delle periferiche nei sistemi TV, ma da quel …
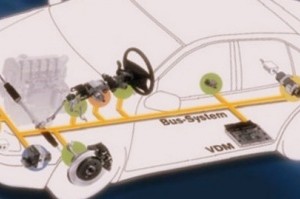
Il bus LIN (Local Interconnect Network) fu sviluppato dal consorzio LIN nel 1999 come un’alternativa low-cost al bus CAN per applicazioni in cui quest’ultimo risultava meno veloce, versatile e più costoso. Queste applicazioni comprendono, tra le altre, le comunicazioni tra …
Il CAN (Controller Area Network) era stato inizialmente sviluppato negli anni ’80 dalla Robert Bosch GmbH come un bus low-cost per le comunicazioni tra dispositivi in ambienti elettronicamente rumorosi. Mercedes-Benz è diventato il primo produttore nell’automotive, nel 1992, ad implementare …
RS-232 è uno standard ampliamente utilizzato per comunicazioni seriali tra due dispositivi su una breve distanza. È meglio conosciuto per il suo utilizzo in porte seriali di vecchi PC, ma è anche comune per i sistemi embedded come una porta …
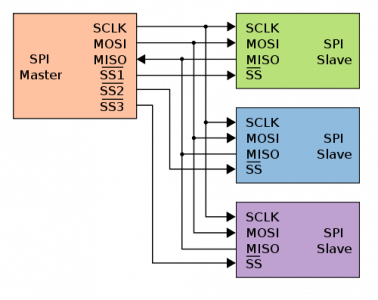
Il bus SPI (Serial Peripheral Interface) fu originariamente sviluppato da Motorola verso la fine del 1980 per la sua serie 68000 di microcontrollori. Grazie alla semplicità e popolarità del bus, molti altri produttori hanno adottato lo standard nel corso degli …
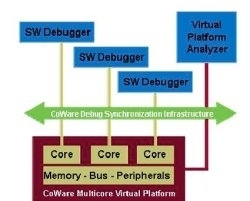
Howto Debug un SoC multi-core. Prima di determinare il sistema on chip multi-core appropriato per il debugging è però importante capire le esigenze dell'utente. Questo articolo presenta come fare il debug di un SoC (system-spanning on-chip) multi-core.
Uno dei principali vantaggi del Background Debug Mode BDM consiste nel fatto che si tratta di un metodo particolarmente economico per ottenere gli stessi risultati di debug che si ottengono in complessi (e costosi) emulatori. Inoltre, il sistema BDM offre …
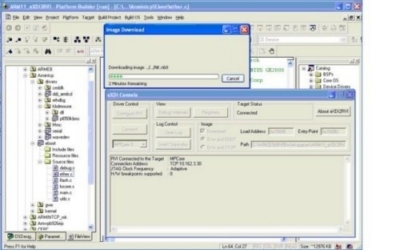
Supporto del debug del RealView Ice in MS Windows CE 6. Il rilascio del nuovo aggiornamento dei driver RealView Ice e XDI2 da parte di ARM semplifica molto il compito degli sviluppatori che possono ora operare ance in ambiente Windows …