
La telecamera posteriore, in grado di semplificare e aumentare il grado di sicurezza durante le manovre di parcheggio o quando si innesta la retromarcia, è oggi un dispositivo disponibile su molti modelli di autovetture, anche quelle di classe più economica. In questo articolo presenteremo una soluzione semplice e compatta, basata sull'utilizzo di una telecamera da 1,3 Megapixel con una connessione in grado di trasferire, su un unico cavo coassiale, il segnale video digitale, l'alimentazione, e i segnali di controllo e diagnostici per la telecamera.
Introduzione
I sistemi avanzati di assistenza alla guida (indicati anche con il termine ADAS, acronimo di Advanced Driver Assistance Systems), stanno acquisendo un ruolo sempre più importante nel settore automotive. Spesso questi sistemi ricorrono all'impiego di alcune telecamere per implementare diverse funzionalità, quali ad esempio:
- telecamera per la visione durante la retromarcia e per il parcheggio assistito
- sistemi di visione esterna, con copertura fino a 360°
- sistemi di visione ADAS di tipo evoluto
Requisito fondamentale per tutti questi tipi di applicazione è naturalmente l'impiego di una telecamera di dimensioni compatte, dotata di una risoluzione sufficientemente elevata, e in grado di integrarsi agevolmente con gli altri dispositivi elettronici presenti a bordo del veicolo, quali ad esempio l'ECU.
Texas Instruments ha proposto una soluzione basata sull'impiego della telecamera OV10640 da 1,3 Megapixel prodotta da OmniVision, un serializzatore da 1,4 Gbit/s e tutti i circuiti in grado di fornire l'alimentazione richiesta. Tutte queste funzionalità sono racchiuse all'interno di una scheda di soli 20 mm x 20 mm (si osservi la Figura 1), in grado di interfacciarsi con il resto del sistema tramite un singolo cavo coassiale da 50 Ohm.
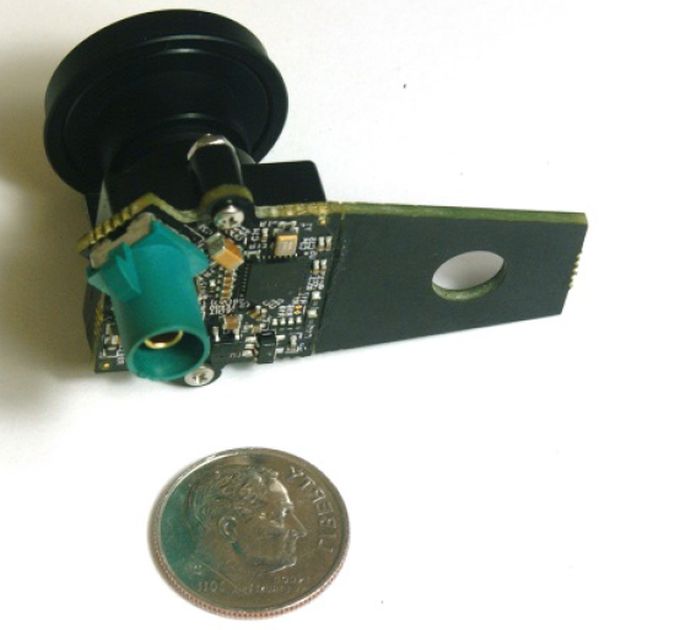
Figura 1: le dimensioni estremamente compatte del modulo telecamera
Tra i principali vantaggi offerti da questa soluzione, ricordiamo:
- progetto con dimensioni ottimizzate del PCB, pari a soli 20x20 mm;
- alimentazione ottimizzata per le dimensioni ridotte e per garantire un basso rumore;
- funzionalità diagnostica e Built In Self Test (BIST) integrato;
- singolo connettore coassiale di tipo Rosenberger Fakra, adatto per gestire segnali video digitali, segnali di alimentazione, controllo, e diagnostica;
- sensore di immagine HDR OV10640 da 1,3 Mpixel, in grado di fornire un'immagine raw con risoluzione su 12 bit;
- aletta per l'installazione sul telaio inclusa nel design;
- alimentazione su cavo coassiale compresa tra 4V e 17V.
Lo schema a blocchi
In Figura 2 possiamo osservare lo schema a blocchi della soluzione proposta.
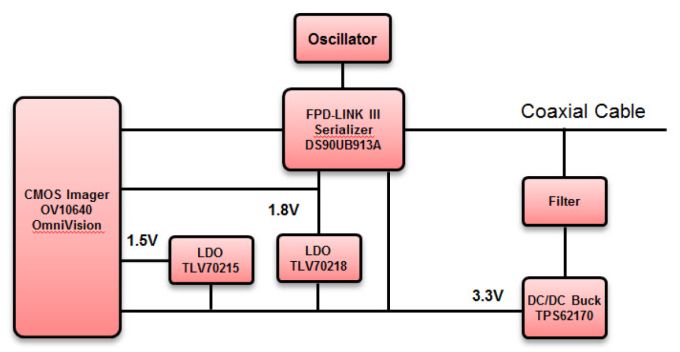
Figura 2: schema a blocchi del progetto
Il punto di ingresso alla scheda è rappresentato dal cavo coassiale, di tipo FAKRA, che include sia i segnali per l'alimentazione continua che i canali dati e controllo previsti dal collegamento FPD-Link III. Il filtro visibile nelle immediate vicinanze del connettore coassiale serve a bloccare tutte le componenti ad elevata velocità del segnale (senza introdurre un'attenuazione significativa), permettendo alla componente relativa al segnale di alimentazione in continua di oltrepassare indisturbato il filtro stesso. Il segnale di alimentazione in continua può quindi raggiungere l'ingresso del convertitore buck da 3,3 V, visibile nello schema in basso a destra. Le altre due linee di alimentazione richieste dal serializzatore e dalla fotocamera sono realizzate tramite due regolatori a basso dropout (LDO), con tensioni di uscita pari a 1,8 V e 1,5 V, rispettivamente.
La componente del segnale ad elevata frequenza è collegata direttamente al serializzatore: questo è il cammino percorso dal segnale video e dal canale di controllo tra il serializzatore (presente sulla scheda) e il deserializzatore (presente all'esterno, su un'altra board che si interfaccia tipicamente con una MCU o con l'ECU stessa).
L'uscita del sensore fotocamera (CMOS imager) è invece collegata al serializzatore tramite un'interfaccia DVP (Digital Video Port). L'uscita video, che può avere una risoluzione su 10-bit oppure su 12-bit e include anche due segnali di sincronismo, viene convertita in un singolo flusso dati seriale ad alta velocità (stream) che viene trasmesso tramite il cavo coassiale al deserializzatore presente all'altro capo del cavo stesso. Sullo stesso cavo coassiale viaggiano poi i segnali relativi ai canali di controllo, bidirezionali, separati e a bassa latenza. Questi segnali sono utilizzati dal microprocessore che governa il sistema per configurare e controllare le funzionalità e i parametri del modulo fotocamera.
I componenti del circuito
Dopo questa rapida panoramica del circuito, vediamo di analizzare i componenti principali dello stesso, tutti visibili nello schema a blocchi di Figura 2.
DS90UB913A-Q1
Si tratta del modulo serializzatore, in grado di offrire un'interfaccia di tipo FPD-Link III con un canale dati ad alta velocità e un canale di controllo bidirezionale per la trasmissione su un singolo cavo coassiale o su una coppia di fili differenziale. Il chipset include la segnalazione differenziale sia sul canale dati ad elevata velocità che sul canale di controllo bidirezionale.
Come già anticipato in precedenza, il chipset serializzatore (e il suo omologo deserializzatore) sono stati espressamente progettati per la comunicazione tra il modulo fotocamera (imager) e il processore video, solitamente residente nell'ECU (Electronic Control Unit).
L'immagine di Figura 3 ben evidenzia il collegamento serializzatore/deserializzatore tramite interfaccia FPD-Link III, molto diffusa nel settore automotive soprattutto per le applicazioni di image processing.
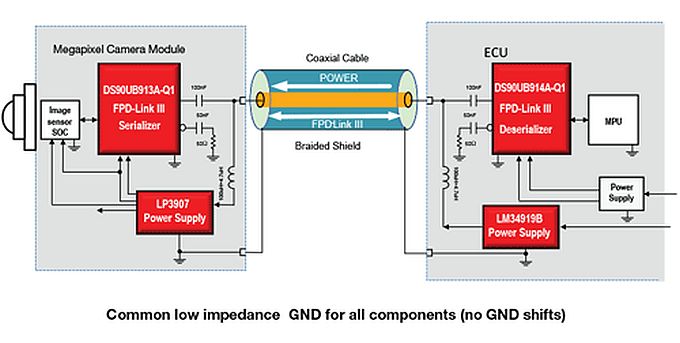
Figura 3: collegamento tra serializzatore e deserializzatore
L'utilizzo di un serializzatore per aggregare su un unico cavo coassiale (o su una coppia di fili) il segnale video a 12-bit con il segnale di controllo bidirezionale consente di semplificare notevolmente la complessità del sistema, riducendo i cablaggi e i costi complessivi. L'ingresso video parallelo del DS90UB913A-Q1 si accoppia perfettamente con l'uscita video parallela a 12-bit del modulo imager OV10640. Aggiungendo un opportuno filtro, il segnale di alimentazione (detto anche Power Over Coax, o semplicemente POC), il segnale video, i segnali di controllo per l'interfaccia I2C e per la diagnostica, possono essere tutti trasmessi su un unico ed economico cavo coassiale, coprendo senza problemi distanze fino a 15 metri.
TPS62170-Q1
Questo componente è un convertitore DC di tipo step-down, adatto ad impieghi automotive, ottimizzato per le applicazioni con elevata densità di potenza. L'elevata frequenza di switching utilizzata (il valore tipico è pari a 2,25 MHz) consente l'utilizzo di induttanze di valore molto piccolo, e fornisce una riposta al transitorio molto rapida.
Al fine di mantenere le dimensioni complessive della fotocamera più piccole possibili, anche l'alimentazione deve presentare ingombri molto limitati. Inoltre, essa deve avere un elevato grado di efficienza, senza introdurre del rumore addizionale che può degradare la qualità dell'immagine proveniente dal sensore. Spesso, questi due requisiti sono in contrapposizione tra loro. Un alimentatore switching è più efficiente di un regolatore lineare, ma può introdurre del rumore nel sistema. I circuiti relativi al sensore fotocamera [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2094 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
EOS-Book @6 L’arte dello sbroglio dei circuiti stampati (tutorial avanzato) PCB ART2
Realizzare un Amplificatore Differenziale BJT con LTspice

Molto interessante, sarebbe utile l’abbinamento di questa telecamera con dei sensori di parcheggio, così da completare un sistema desiderato da molti autisti,
Io non sono ancora in grado di programmare , ma sicuramente con una delle schede trattate in questa rivista sarebbe un bel progetto.
Un sistema del genere oltre che come “retro” camera potrebbe anche essere usato per altri tipi di mezzi, come i vecchi trattori, dove magari, avendo una posizione di guida molto alta, potrebbe essere utile avere una vista su quanto si trova anche davanti, oltre che dietro (chiaramente proteggendo la camera in modo che non venga danneggiata.
Ho letto che la camera OV10640 produce in uscita un segnale che può essere anche di tipo LVDS o MIPI. Che differenze ci sono con DVP?
Grazie
Salve Alessandro, la differenza è che la DVP (Digital Video Port) è un’interfaccia parallela, mentre la MIPI (Mobile Industry Processor Interface) è un’interfaccia seriale con segnali di tipo differenziale e velocità elevata. Quindi, se si devono trasferire molti dati (si pensi allo streaming video ad alta risoluzione) occorre un’interfaccia MIPI, in caso contrario può essere sufficiente un’interfaccia DVP.
E’ già la quarta automobile che posseggo con la telecamera posteriore per la retromarcia e devo dire che è forse l’accessorio più utile e irrinunciabile. Per me, senza dubbio questo progetto si presta ad altre applicazioni ad esempio la sorveglianza fissa dove non si possono portare altri cavi o dove si richiede un basso assorbimento di potenza. La distanza di 15 metri potrebbe essere un limite, ma con un buon cavo coax si può aumentare? Quant’è il consumo totale delle due schede?
Grazie
Salve Zopdar, l’assorbimento massimo dichiarato da TI per l’intero design è di 1W (0,6W valore tipico), con alimentazione POC (Power Over Coax) di 12V. La distanza massima di 15 metri rientra negli standard automotive e corrisponde all’incirca alla distanza percorsa dai vari bus di comunicazione presenti su un veicolo recente. Il superamento di questa distanza penso possa comportare potenziali problemi di affidabilità e soddisfacimento degli standard automotive, molto rigorosi. Per applicazioni non automotive forse è possibile superare il limite di 15 metri, magari utilizzando dei repeater per questo tipo di cavi.
Bel progetto, che al di là dell’utilità dell’applicazione stessa mostra la forza della miniaturizzazione, che permette l’integrazione di funzione complesse in spazi estremamente ridotti; ottimo progetto per ricordare sempre una delle maggiori linee guida per la progettazione di sistemi embedded.
Progetto completo e ben spiegato. In particolare trovo interessante come sia stato usato il componente DS90UB913A per gestire la presenza di più moduli imager collegati allo stesso bus I2C