Il bus LIN (Local Interconnect Network) fu sviluppato dal consorzio LIN nel 1999 come un’alternativa low-cost al bus CAN per applicazioni in cui quest’ultimo risultava meno veloce, versatile e più costoso. Queste applicazioni comprendono, tra le altre, le comunicazioni tra sensori intelligenti ed attuatori, come i controlli dei finestrini, la chiusura delle portiere, i sensori per la pioggia, i sensori per il controllo dei tergicristalli e il controllo del clima. Nonostante questo, CAN è ancora il bus primario utilizzato, tra gli altri, per il controllo del timing del motore, degli ABS e del power train, grazie alla sua tolleranza al rumore, ad eccellenti capacità di individuazione dell’errore e all’alta velocità nel trasferimento di dati.
LIN bus: come funziona
Il bus LIN è un’implementazione low-cost, a filo unico, basata sullo standard Enhanced ISO9141. I network LIN hanno un solo master e uno o più slave. Tutti i messaggi vengono inizializzati dal master con un solo slave che risponde ad ogni messaggio, così non c’è bisogno delle capacità di individuazione della collisione e dell’arbitraggio, come nel CAN.
La comunicazione si basa su UART/SCI con i dati che vengono spediti in byte da 8 bit insieme ad un bit di start, ad un bit di stop a ad uno di parità. Le velocità dei dati variano da 1Kb/s a 20Kb/s. Se da un lato può sembrare lenta, è ideale per le applicazioni prese in considerazione e minimizza le EMI.
Il bus LIN è sempre in uno dei due stati: attivo o in sleep. Quando è attivo, tutti i nodi sul bus sono in attesa di comandi rilevanti dal bus. I nodi sul bus possono essere messi in sleep sia dal master che rilascia uno Sleep Frame, sia dal bus che diventa inattivo per un tempo più lungo rispetto al lasso di tempo predeterminato.
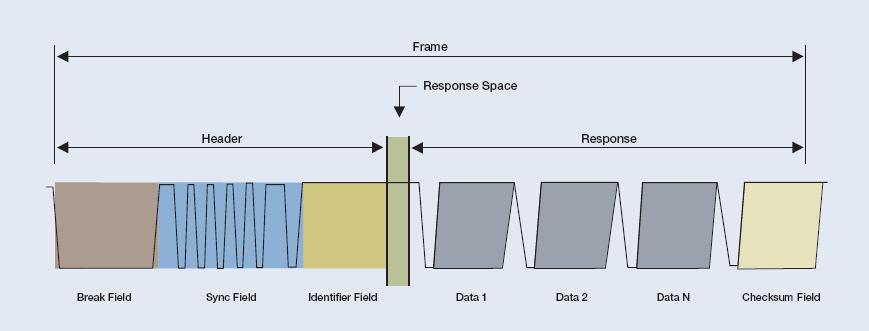
Il bus viene poi risvegliato da qualsiasi nodo che richiede un ‘wake up’ o dal nodo master che dispone un break field. I frame LIN consistono in due parti principali, l’header e la risposta. L’header viene inviato dal master mentre la risposta dallo slave. Sia l’header che la risposta hanno dei sub componenti, come mostrato in figura
Debug del bus LIN con l'oscilloscopio digitale
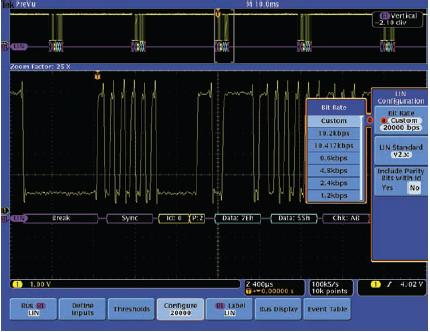
Il supporto LIN sulla serie MSO/DPO è disponibile sia via il modulo applicativo DPOxAUTO, sia via DPO4AUTOMAX Serial Triggering and Analysis. Utilizzando i tasti del pannello frontale del bus, si può facilmente definire il bus LIN, inserendo i parametri base del bus, come la versione LIN utilizzata, il bit rate, la polarità, la soglia, e dove campionare i dati.
Il menu di setup LIN , insieme ad un frame LIN decodificato, sono mostrati in figura.
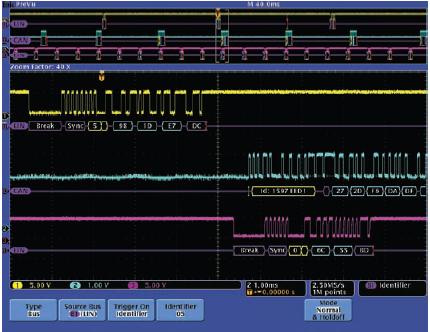
Un potente funzione della serie MSO/DPO è la capacità di definire e decodificare fino a quattro bus seriali contemporaneamente. Se torniamo indietro all’esempio fatto per il bus CAN, immaginate che i controlli dei finestrini vegano operati dal bus LIN.
Quando il guidatore preme il controllo Passenger Window Down, viene inizializzato un messaggio su un bus LIN nella portiera del guidatore, che passa prima attraverso un gateway CAN centrale e poi viene inviato ad un altro network LIN nella portiera del passeggero. In questo caso, possiamo innescare il messaggio rilevante su uno dei bus e ottenere e decodificare tutti e tre i bus contemporaneamente, rendendo molto semplice vedere il traffico che passa da un bus all’altro attraverso il sistema.
Questo è mostrato in figura, dove è stato innescato il primo messaggio LIN e ottenuti tutti e tre i bus.
La capacità di triggering della serie MSO/DPO include i seguenti tipi:
- Sync: innesca l’identificatore del campo di sincronizzazione
- Data: innesca da 1 a 8 byte di valori di dati specifici o di range di dati
- Identifier & Data: innesca una combinazione sia dell’identificatore che dei dati
- Wake up Frame: innesca un frame wake up
- Sleep Frame: innesca un frame sleep
- Error: innesca errori di sincronizzazione o errori di checksum Questi tipi di trigger permettono di isolare ogni cosa che si sta cercando su un bus LIN nel modo più rapido che ci sia mai stato.
E con le altre funzioni seriali avanzate trovate sulla serie MSO/DPO, come le tavole di eventi, il debugging dei progetti automotive basati su LIN diventa estremamente facile.
Gli oscilloscopi digitali Tektronix sono disponibili da Farnell

L'articolo è tratto da Debugging Serial Buses in Embedded System Designs di Gina Bonini Technical Marketing Manager @Tektronix.
Oscilloscopio digitale Tektronix MSO2024
L'oscilloscopio Tektronix (4 canali, display TFT color, 200Mhz di banda e campionamento a 1Gsps) è disponibile subito qui nello store.


Sicuramente l’architettura è semplice però ci sono limiti nella progettazione, soprattutto nell’indirizzamento dei nodi…
infatti il bus lin è una versione low cost del can bus