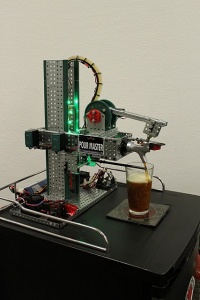
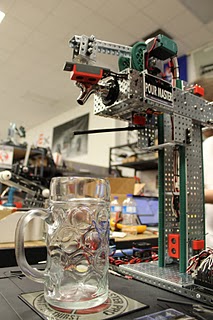
Siete interessati ad un robot che vi aiuta a versare la birra in un bicchiere ? Questo articolo può fare per voi. L'intenzione di questo robot è quella di versare automaticamente una birra in ogni dimensione di bicchiere in vetro.
Il robot, costruito in soli 4 giorni, è una modifica dei già comuni robot che si trovano in commercio per il riempimento automatico di liquido (per esempio la macchinetta del caffè). Può essere utilizzato per una tazza di caffè di piccole dimensioni fino ad una brocca più grande.
Il robot è formato da sensori che rivelano l’altezza del bicchiere; un rubinetto, alimentato da un motore, versa il liquido. Un potenziometro montato sul rubinetto, inoltre, permette ad Arduino di individuare il punto di fine corsa. Due sensori ad ultrasuoni montati sulla torre individuano il livello e la presenza del liquido nel bicchiere.
Il sistema elettronico, come accennato in precedenza, è basato su Arduino con l’utilizzo di una macchina a stati finiti per determinare la funzione del robot in accordo con la risposta dei sensori. Arduino è una piattaforma hardware che si basa su un microcontrollore implementato su una sola e semplicissima scheda di I/O, affiancata da un ambiente di sviluppo integrato (IDE) multipiattaforma (Linux, Apple Macintosh e Windows). La piattaforma hardware Arduino è distribuita agli hobbisti in versione generalmente pre-assemblata, acquistabile in internet o in negozi specializzati.
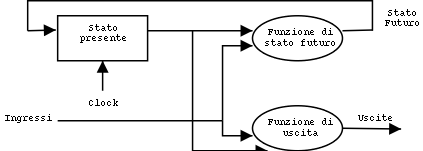
La macchina a stati finiti è caratterizzata da un insieme di stati e da due funzioni dette funzione di stato futuro e funzione di uscita. La funzione di stato futuro è una funzione combinatoria che, dato il valore dell'ingresso e dello stato presente, calcola il valore del prossimo stato assunto dal sistema; la funzione di uscita produce invece le uscite a partire dallo stato presente e dagli ingressi. La macchina a stati finiti utilizzata in questa applicazione è di tipo sincrono, cioè lo stato cambia in corrispondenza dei cicli di clock, e si calcola un nuovo stato ad ogni nuovo ciclo di clock; in pratica gli elementi di stato sono aggiornati solo in corrispondenza dei fronti del clock. Quando si usa una macchina a stati finiti come controllore, la funzione di uscita viene spesso limitata in modo da dipendere solo dallo stato presente: macchine a stati finiti di tale tipo sono dette macchine di Moore. Se la funzione di uscita dipendesse sia dallo stato presente che dall'ingresso corrente, si direbbe che la macchina è una macchina di Mealy; i due tipi di macchine hanno capacità equivalenti, e si possono convertire l'una nell'altra seguendo un procedimento del tutto meccanico. Il vantaggio fondamentale delle macchine di Moore è di essere più veloci, mentre le macchine di Mealy possono rivelarsi più piccole, poichè possono richiedere un numero di stati minore rispetto alle corrispondenti macchine di Moore. Una macchina a stati finiti può essere implementata mediante un registro per memorizzare lo stato presente ed un circuito logico combinatorio per calcolare le funzioni di stato futuro e di uscita. Per implementare la macchina a stati finiti occorre innanzitutto assegnare dei valori numerici agli stati mediante un processo che prende il nome di codifica degli stati o assegnazione degli stati. Il circuito logico combinatorio è spesso implementato ricorrendo a logica strutturata, ad esempio una PLA, che può essere costruita automaticamente a partire dalle tabelle delle funzioni di stato futuro e di uscita.
Sul nostro cameriere robotizzato, infine, sono presenti LED RGB che permettono di individuare la presenza di un bicchiere e la fine del processo di riempimento; un display LCD fornisce informazioni aggiuntive come lo stato e codici di errore. I LED RGB si basano sull'inserimento, in un medesimo contenitore, di tre LED distinti, uno rosso, uno verde e uno blu. A seconda delle proporzioni in cui vengono mescolati (che dipendono dalla quantità di corrente con cui vengono alimentati), si ottiene tutta la gamma dei diversi colori dello spettro visibile


Certo che sono interessato, così non la smetto più di bere e versarmi la birra addosso! 😀
speriamo che le persone intelligenti usano sempre di più il loro cervello!
Stupendo! Progetto interessantissimo! chi mi sa dire come comprare quelle piastre forate?! mi interessano molto, con quelle ci puoi fare molte cose!
io sinceramente non saprei…
Non mi sembra niente di complicato, sia a livello hardware che di programmazione. L’unico intoppo è trovare, almeno qui in Italia e per me, quelle griglie 🙂
Un viedo interessante
http://www.engineeringtv.com/video/Top-5-Small-Robots-of-2011
è semplice, niente di complicato, è possibile realizzare cose pi+ complesse…, solo che i costi ancora non sono molto abbordabili, se ne approfittano le poche aziende che vendono componenti vari….
Non so se è la stessa cosa, ma questo articolo potrebbe andare bene
http://www.robot-italy.com/it/makerbeam-starter-kit-alluminio-anodizzato.html