
Nella progettazione delle schede elettroniche di qualsivoglia tipologia, un passaggio fondamentale e critico è sempre la progettazione degli stadi di alimentazione. Infatti, in genere, a partire dalla tensione di ingresso che può essere DC o anche AC nei componenti collegati direttamente alla rete elettrica, è fondamentale andare a generare tutte le tensioni necessarie al corretto funzionamento del dispositivo. Inoltre, quando si lavora con microcontrollori, FPGA, ASIC e via dicendo, le tensioni di alimentazione da realizzare possono essere molteplici. La strategia di conversione della tensione in ingresso nelle tensioni necessarie è fondamentale per garantire non solo il corretto funzionamento ma anche il consumo energetico e dunque la dissipazione complessiva del dispositivo. In questo articolo andremo ad osservare nel dettaglio i principali schemi architetturali di conversione DC/DC.
Introduzione
Durante la progettazione di una scheda embedded risulta cruciale la fase di progettazione della sezione di alimentazione. A partire dalla tensione di input, dalle correnti di carico e dalle diverse tensioni utili al corretto funzionamento è necessario definire l’architettura dell’alimentatore al fine di garantire non solo le alimentazioni corrette ma anche il giusto compromesso tra dimensioni, costo ed efficienza. Una prima sostanziale differenza di topologia nelle architetture degli alimentatori (o convertitori DC/DC) la troviamo tra i convertitori “lineari” e quelli di tipo “switching”. Quest’ultimi ricoprono la stragrande maggioranza delle topologie di convertitori, ma quelli lineari, nella loro semplicità di realizzazione e costo trovano ancora una larga diffusione in innumerevoli applicazioni.
1. Convertitori Lineari
Nei convertitori DC/DC di tipo lineare la regolazione dell’output è gestita appunto da un elemento lineare (Figura 1), come ad esempio una resistenza di carico. Questa topologia di regolazione presenta degli aspetti vantaggiosi quali la semplicità architetturale e il costo di realizzazione, nonché un ridottissimo rumore sull’uscita regolata in quanto non sarà presente ripple. Ovviamente, dall’altro lato abbiamo anche degli svantaggi come ad esempio l’efficienza e la dissipazione del calore.
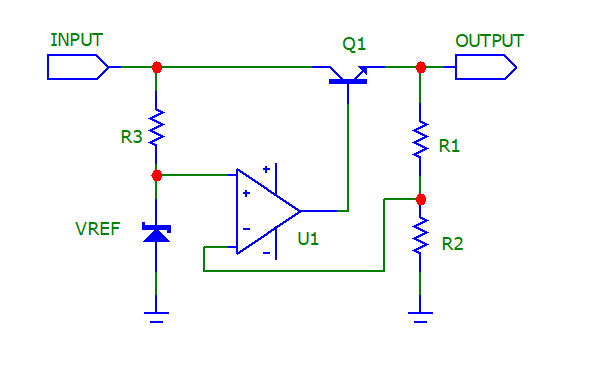
Figura 1: Architettura di principio di un regolatore di tensione lineare
In Figura 1 è rappresentata l’architettura di principio di un regolatore lineare. Come si osserva, il controllo di regolazione è semplicemente fatto con un operazionale che regola rispetto ad una rete di feedback della tensione di uscita. Prima di tutto, osserviamo che i regolatori lineari possono essere solo di tipo step-down, ossia a partire da una tensione di alimentazione in ingresso possono regolare solo tensioni di uscita inferiori rispetto all’ingresso. Questa caratteristica è dovuta proprio alla struttura circuitale di un regolare lineare. La caduta di tensione tra la tensione di uscita e la tensione di ingresso è detta appunto Drop-Out (che indichiamo con V_DP). Questo parametro è fondamentale anche per la definizione della potenza dissipata come riportata nell'Equazione 1.

Equazione 1: Formula della potenza dissipata da un regolatore lineare
La potenza dissipata dunque dipende dalla differenza di tensione tra ingresso e uscita. Ovviamente, quanto più è ampia questa differenza tanto più sarà ampia la dissipazione da parte del convertitore, dunque si avrà che l’efficienza dello stadio di conversione cala drasticamente. Esistono in commercio innumerevoli dispositivi ottimizzati per lavorare in determinati range di funzionamento e che producono un Low Drop-Out (LDO) in cui la caduta di tensione tra ingresso e uscita è di appena 200mV. Dunque, per la scelta del giusto convertitore lineare abbiamo la necessità di conoscere semplicemente 3 parametri del circuito: tensione di ingresso Vi, tensione di uscita Vo e corrente di uscita Io. A partire da questi parametri possiamo calcolare la potenza dissipata dal regolatore (applicando l'Equazione 1 riportata in precedenza) e dunque effettuare le relative considerazioni termiche ed eventualmente definire la strategia di dissipazione della potenza. Ovviamente, questa strategia ha un impatto nella progettazione del PCB sia dal punto di vista del posizionamento del componente che dal punto di vista delle pad termiche di dissipazione. Inoltre, anche l’interazione con gli altri componenti a bordo scheda oppure la tipologia di alloggiamento della scheda stessa possono influire sulle prestazioni termiche di dissipazione.
2. Convertitori Switching
Dopo aver introdotto i regolatori di tensione nel precedente paragrafo, passiamo ora ai regolatori di tensione di tipo switching, detti anche SMPS (Switched Mode Power Supplies). Questi, in genere, presentano dei livelli di efficienza decisamente superiori ai regolatori lineari, ma al contempo presentano anche livelli di rumore generato superiore. Esistono molteplici soluzioni di regolatori switching. La prima distinzione che dobbiamo fare è sicuramente tra alimentatori di tipo step-down che di fatto operano abbassando la tensione di ingresso e alimentatori di tipo step-up dove la tensione di uscita regolata presenta un valore più elevato rispetto a quella di ingresso.
2.1 Buck converter
La prima topologia di circuito switching che andiamo ad osservare è il buck converter, uno swtiching di tipo step down che presenta un’architettura molto semplice. Come possiamo osservare in Figura 2 questo è formato da un condensatore di ingresso Ci, da un interruttore MOSFET Q1 (metal-oxide semiconductor field-effect transistor), da un diodo D1, da un induttore L1 e da un condensatore di uscita Co.
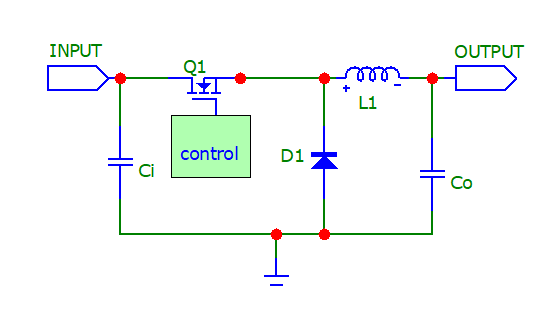
Figura 2: Architettura di principio di un convertitore buck asincrono
Quando l’interruttore è chiuso, dunque il MOSFET è in conduzione, avviene un trasferimento di energia dall’ingresso verso l’uscita, andando dunque a caricare la capacità di uscita Co. Il ripple sulla tensione di uscita è un parametro fondamentale nei regolatori di tipo switching. L'Equazione 2 riporta la formula della corrente di ripple. Da questa equazione possiamo osservare che la corrente di ripple dipende dal drop-out tra ingresso e uscita ma anche dal tempo di switching e dalle dimensioni dell’induttore. All’aumentare del valore di induttanza si riduce il ripple sulla corrente. Di fatto, la combinazione induttore-capacità di uscita si comporta ovviamente come un filtro passa-basso.
Equazione 2: Formula della corrente di ripple nel convertitore buck
Un altro parametro fondamentale da tenere in considerazione nella progettazione di un convertitore di tipo buck è la corrente che interessa il condensatore di ingresso. Questa è data dall’Equazione 3 ed è fondamentale conoscere questo valore per il corretto dimensionamento del condensatore di ingresso.
Equazione 3: Formula della corrente RMS nel condensatore di ingresso
All’interno dell’equazione il parametro D è detto duty-ratio (come il duty cycle) o guadagno dc del convertitore ed è dato dal rapporto tra tensione di uscita Vo e tensione di ingresso Vi. Questo schema circuitale appena esposto è detto buck converter asincrono (o non-sincrono). Esiste anche una forma circuitale detta sincrona in cui il diodo D1 è sostituito da un secondo interruttore MOSFET (rappresentato in Figura 3). Questa sostituzione tra diodo e MOSFET consente nel convertitore sincrono di raggiungere efficienze più alte quando la tensione di uscita è molto bassa (tipicamente pari alla tensione di soglia del diodo Schottky).
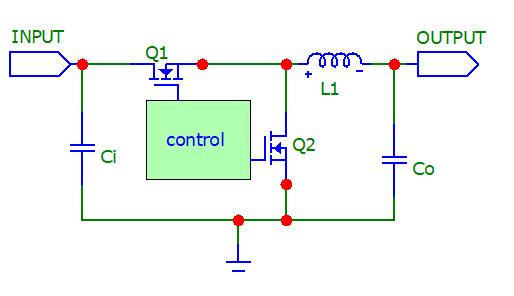
Figura 3: Architettura di principio di un convertitore buck sincrono
La differenza tra lo schema circuitale sincrono (Figura 3) e quello asincrono (Figura 2) può essere spiegata più in dettaglio affrontando la trattazione tecnica dei modi di funzionamento dei convertitori DC/DC. In particolare, il convertitore buck asincrono, durante la conduzione di Q1, lavorerà fornendo energia verso l’output. Questa energia sarà accumulata dall’induttore che la rilascerà quando il MOSFET è nella condizione di OFF. In particolare, nella condizione di OFF ai capi dell’induttore è presente una tensione Vout il cui circuito si richiude attraverso il diodo D1 (quindi a meno della caduta di tensione sul diodo). Dunque, l’energia accumulata nell’induttore sarà trasmessa al carico con una corrente di scarica che dipende dalla Vout e dal valore dell’induttore. La corrente dell’induttore sarà sempre uguale alla corrente sul carico e si dice che il circuito sta operando in Continuous Conduction Mode (CCM). Purtroppo, nei circuiti possono crearsi delle condizioni di variazione di carico che inducono a raggiungere valori nulli della corrente dell’induttore. Ciò causa una modalità di funzionamento detta Discontinuous Conduction Mode (DCM) che può creare non poche difficoltà ai progettisti quali la generazione di disturbi EMI, una dissipazione termica extra, una risonanza da parte dell’induttore e altro ancora. Lo schema circuitale del buck converter sincrono tende a risolvere la problematica evitando la condizione operativa DCM.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2227 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Linee guida per la progettazione di PCB nelle applicazioni a microonde e millimetriche

Intervistiamo ChatGPT: alla scoperta del nuovo chatbot
Riconoscimento facciale per la domotica con l’ESP32-CAM – Parte 3
Droni e normativa: chi può pilotare un drone, cosa si può e cosa non si può fare
