
In questo articolo verranno esplorate delle problematiche che si possono incontrare quando si utilizza un qualsiasi sensore magnetico per la misurazione di un campo magnetico. Questo accade in molte applicazioni ad uso dei consumatori. Per farla più semplice, possiamo considerare il caso in cui si vada ad integrare un sensore magnetico in uno smartphone.
Di norma, il sensore magnetico si usa per implementare le capacità di navigazione e di orientamento; in un ambiente libero dalle interferenze è possibile eseguire delle misurazioni direttamente dal proprio sensore. Il mondo reale, però, non è così semplice. Affrontiamo dunque una serie di problemi.
Problema 1: distorsione del campo magnetico dovuto alla presenza di ferro morbido
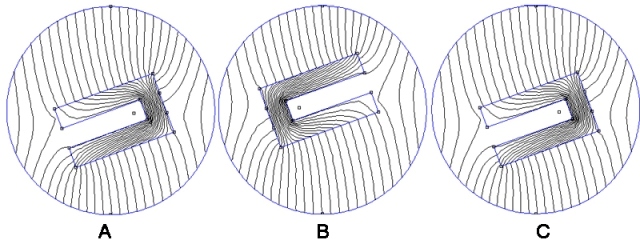
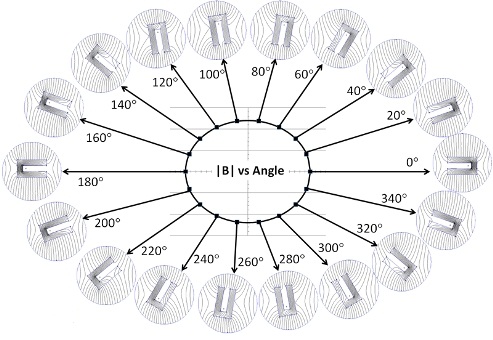
Ferro morbido, cos’è? Pensiamo ai contatti delle batterie, agli scudi EMI; per rendere più chiaro il punto in figura è illustrata una simulazione di un pezzo di ferro di cavallo posizionato in un campo magnetico uniforme. La figura 1A mostra come il campo magnetico sia distorto dalla presenza del ferro di cavallo. L’acciaio offre un percorso di resistenza più basso al campo magnetico rispetto all’aria circostante. Quindi per il campo è naturale essere distorto. La figura 1B presenta sempre la stessa barra di ferro, ruotata però di 180 gradi nello stesso campo. Si può notare come le situazioni descritte in 1A ed in 1B siano molto simili prendendo 1B e ruotandolo, prima intorno ad un asse, poi intorno all’altro, per ottenere 1C, che nella forma è identica ad 1A. Questo ha senso quando si realizza che, dalla prospettiva dell’acciaio, 1A e 1B sono identici, ad eccezione della polarità del campo magnetico. Si dovrebbero ottenere risultati simmetrici. Più importante, è possibile utilizzare questa semplice osservazione per rimuovere la distorsione, causata dal ferro morbido, dalla misurazione del campo magnetico. Per farlo, occorre prendere lo stesso ferro di cavallo e ruotarlo di 20 gradi nello stesso campo magnetico. Contemporaneamente, si va a misurare e tracciare il campo magnetico al punto ch di vede annidato alla base del ferro. È importante notare che questo punto è fisso in relazione al metallo. Essi ruotano insieme. La simmetria vista in precedenza continua a mantenersi fino a che si ruota il ferro morbido. La distorsione del campo ad ogni angolo di rotazione combacia con la distorsione vista con una rotazione di 180 gradi. Ancor più importante, la magnitudo del campo misurata ad ogni angolo di rotazione combacia con la magnitudo del campo misurato con un angolo di 180 gradi positivi. Se si tracciano le letture del sensore x/y per tutti i punti, si ottiene un ellisse. Questa è una funzione della fisica di base, e si mantiene sempre vera, senza tener conto del tipo di sensore utilizzato per eseguire la misurazione.
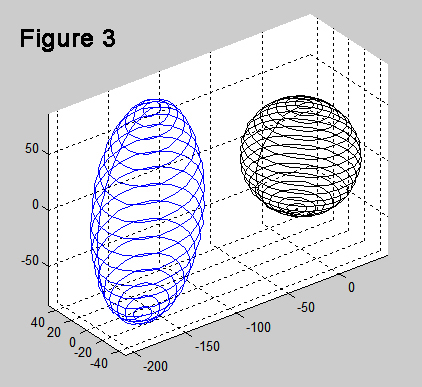
Se non vi è presenza di ferro morbido, e si ruota semplicemente il sensore, l’ellisse collasserebbe in un semplice cerchio. Dal momento che il campo resta lo stesso a prescindere dall’angolo di misurazione, questo deve essere il caso. Quindi si nota come l’effetto del ferro morbido è quello di distorcere un cerchio, il cui radiante è equivalente alla magnitudo del campo magnetico, in un ellisse. Questo risultato può essere esteso a tre dimensioni. Le misurazioni prese mentre si ruota un sensore nello spazio libero privo di disturbi da parte di ferro sia duro che morbido, possono essere visualizzate come una sfera con un radiante fisso equivalente alla magnitudo del campo magnetico ambientale. Aggiungendo ferro morbido si distorce la sfera in un ellissoide 3D, come in figura 3.
L’equazione della sfera 3D è:
x2 + y2 + z2 = r2
Nella forma di matrice, se
X= [x y z],
allora
XXT = r2.
Per quanto riguarda l’ellissoide, invece:
x2/a + y2/b + z2/c = 1.
E nella forma di matrice:
XAXT = 1, dove
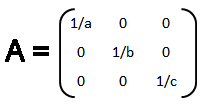
É apprezzabile come l’equazione della sfera si possa ricavare linearmente da quello dell’ellissoide, e viceversa. Se si prende un set rappresentativo di campioni sulla superficie dell’ellissoide, è possibile, tramite una varietà di metodi, determinare la mappatura al contrario, da una lettura distorta del campo magnetico ad una non distorta.
Problema 2: distorsione del campo magnetico dovuta alla presenza di ferro duro
Il ferro duro è semplicemente un modo per esprimere in fisica un magnete permanente. Ma perché ci si dovrebbe preoccupare dei magneti permanenti? Bene, lo smartphone che abbiamo menzionato prima deve avere una speaker, e le speaker contengono un magnete. La buona notizia è che (rispetto agli effetti del ferro morbido) è relativamente semplice compensare le distorsioni dovute al ferro duro. Se un magnete è fisso in una posizione e in un orientamento rispetto al sensore che si sta usando, allora c’è in aggiunta un valore di campo costante. Se sono presenti gli effetti del ferro morbido, l’ellissoide menzionato in precedenza dovrebbe essere centrato a [x, y, z] = [0, 0, 0]. Un magnete permanente, fisso rispetto al punto di misurazione, aggiunge semplicemente una compensazione all’origine dell’ellissoide. Se si possiede un set di dati abbastanza grande, è possibile determinare la compensazione come
[x max – x min, y max – y min, z max – z min]/2
Questa tecnica non funzionerà per magneti che si muovono rispetto al sensore. Il magnete presente sul holster del telefono non può essere permanentemente cancellato. Ma c’è una buona notizia: un cambio improvviso di compensazione/magnitudo del campo magnetico calcolato probabilmente implica che il telefono sia stato inserito o rimosso dal suo holster. Questa può essere una cosa utile da sapere.

Ottimmo articolo corredato di tutte le spiegazioni che servono, sono le basi da conoscere per un uso di sensori magnetici, analoghi studi dovrebbero essere fatti quando si usano altri tipi di sensori tipo accelerometri, giroscopi, gas, temperatura, estensimetri ecc…
Articolo interessante, impreziosito da simulazioni che lo rendono di certo altamente professionale e ben portato avanti. Sui campi magnetici non sono poi così ferrato, e le problematiche esposte nell’articolo mi erano abbastanza estranee. faccio una ricerca di approfondimento e vi faccio sapere un pò cosa riesco a trovare su questo argomento! 😉
Bello questo articolo, si distingue dagli altri perchè mostra un’applicazione pratica dell’elettronica nel funzionamento degli strumenti che abbiamo sempre di più tra le mani. Non so quanto siano diffuse in ambito professionale e industriale le bussole digitali, ma ne sento sempre di più parlare per quanto riguarda l’integrazione in smartphone e simili. Il problema della calibratura è un problema concreto, che vediamo qui spiegato. Mi è sempre piaciuto quando utilizzando la matematica, anche quella un pò più astratta si riesce a risolvere problemi veri. Se ho capito bene dunque il sensore magnetico viene calibrato una volta soltanto in fabbrica, dato che la forma dei ferri dolci non cambia praticamente col passare del tempo.
Vorrei solo proporre una correzione semplice: la sostituzione di x2, y2 e z2 e r2 con x² y², z² e r². Non costa niente ed è più corretto. Dovrei riprendere un pò i libri di geometria, ricordo poco delle rappresentazioni matriciali delle quadriche.
Non conoscevo le caratteristiche geometriche dei campi magnetici, ma oltre a ciò ci dovrebbe essere anche la distorsione dovuta all’induzione indotta nei materiali ferromagnetici dovuta alla variazione del campo magnetico, si pensi quando si ruota un elettromagnete o un magnete permanente che genera un forza magneto motrice su una o più spire che a causa della qualità ferromagnetiche del materiale, sia che si comporti da indotto o induttore, questo rimane magnetizzato nel caso vi sia applicata della tensione continua o nel caso di corrente alternata causa perdite per isteresi.
Non hai tutti i torti… Gli effetti ferromagnetici di componenti che circondano la bussola, dal punto di vista teorico, andrebbero comunque trattati come magneti esterni, dato che non è prevedibile in che modo viene orientato il campo magnetico. C’è poco da fare. La parte buona della cosa è che in genere i materiali utilizzati per la realizzazione di circuiti sono di tipo diamagnetico, quindi non subiscono effetti di isteresi magnetica dovuta a campi esterni temporanei. praticamente è quasi come se non ci fossero. L’esempio dell’articolo è incentrato sul ferro dolce, che ha se non vado errato proprietà paramagnetiche. Al contrario i materiali diamagnetici dovrebbero anche un pò schermare il sistema. Queste cose te le lascio col beneficio del dubbio e prendile con le pinze perchè le ho studiate due anni fa e da allora non le ho più toccate. È facile che io stia sbagliando. Dovrei farmi un bel ripasso anche di fisica2 🙂 comunque il fatto che il rame e il silicio non siano ferromagnetici puoi prenderlo per certo
Ottimo articolo! In risposta a ualcuno che su qualche articolo fa aveva posto esattamente questo problema! Complimenti!
Sicuramente il rame e il silicio non sono magnetici, infatti, molte macchine elettriche utilizzano il rame per gli avvolgimenti, mentre il silicio viene utilizzato per diminuire le perdite magnetiche nei trasformatori e nelle macchine rotanti, poichè riduce l’ampiezza del ciclo di isteresi, quindi fa diminuire le perdite per isteresi e correnti parassite, anche se a causa del silicio aumenta la fragilità del ferro, per cui si limitano le percentuali di silicio attorno al -3% e al massimo del 5% circa. Vi sono anche dei processi costosi di laminazione dei lamierini in uso nei trasformatori di potenza per orientare i cristalli di silicio in modo da ridurre ancor di più le perdite, viene calcolato che queste siano ridotte di circa il 60% rispetto ai lamierini in ferro.