
In questo articolo della Rubrica Firmware Reload vedremo come gestire i segnali biologici, ma soprattutto valorizzarne il contenuto eliminando con i filtri digitali tutto il rumore di fondo dei processi di campionamento, permettendo in un secondo momento di utilizzarli a scopo medico e protesico.
I filtri non ricorsivi (Finite Impulse Response, FIR) presentano una funzione di trasferimento in forma polinomiale di lunghezza finita. Il filtro è praticamente un insieme di stadi di ritardo pesati. La sua rappresentazione a blocchi, il legame ingresso uscita e la sua funzione di trasferimento sono indicate di seguito:
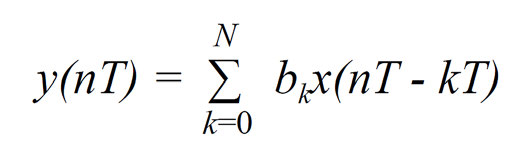
H(z) = b0 + b1z-1 + b2z-2 + … + bNz-N
Questa tipologia di filtri è spesso utilizzata nell’analisi real-time del segnale ECG dato che sono semplicemente progettabili per avere una fase lineare e, non essendo ricorsivi, presentano una elevata stabilità. Tale caratteristica e la loro semplicità realizzativa li rendono particolarmente adatti ad essere implementati come filtri adattativi ovvero quei filtri in cui i coefficienti cambiano in funzione della variazione dei dati di ingresso. Uno svantaggio di questi filtri è che attenuano lentamente il segnale al di fuori della banda passante (roll off lento), quindi se si vuole un taglio veloce è necessario aumentare l’ordine del filtro stesso causando un aumento della complessità computazionale e riducendo le prestazioni. Un esempio classico di applicazione dei filtri FIR sono gli smoothing filter, ovvero quei filtri che riducono il rumore attenuando le alte frequenze. Riferendoci ai segnali biologici, le alte frequenze possono essere rappresentate dalla frequenza di rete (5060 Hz), dagli artefatti dovuti al movimento, dal rumore di quantizzazione. Uno dei metodi più semplici per ridurre questo tipo di rumore è l’utilizzo di un filtro a media mobile (Moving Average filter). In generale, un filtro a media mobile è rappresentato dalla relazione:
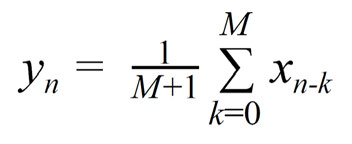
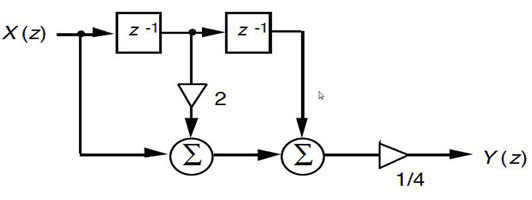
La sua implementazione più semplice è il filtro di Hanning che calcola una media pesata dei campioni considerati all’interno di una finestra di campionamento dando peso 2 al campione centrale della finestra.

Ne consegue che:

I filtri ricorsivi (Infinite Impulse Response, IIR) presentano invece una funzione di trasferimento data da un rapporto di polinomi nella forma generica, che può essere espressa come segue nel diagramma verticale raffigurato:
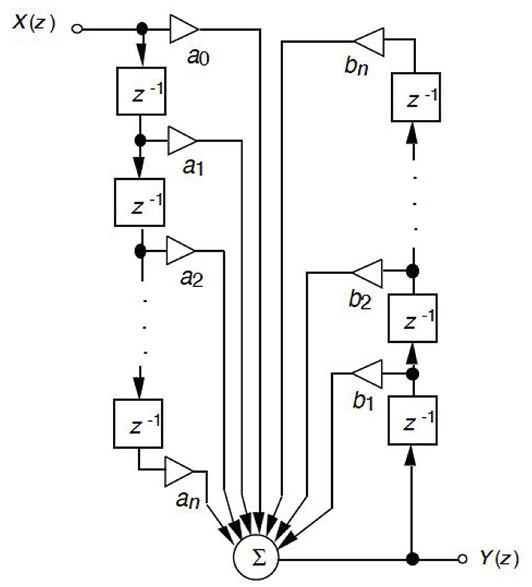
Figura 1
Come si può notare dallo schema, diversamente dai filtri FIR, nei filtri IIR l’uscita y(nT) dipende non solo dal valore corrente dell’ingresso x(nT) ma anche dai precedenti valori dell’uscita stessa y(nT-T), quindi è presente una retroazione nell’implementazione. A seconda del grado del polinomio a denominatore questi filtri vengono detti ad 1 polo , 2 poli,...n poli. Ricordiamo che vengono detti poli le radici del denominatore della funzione di trasferimento e zeri le radici del numeratore. Questa tipologia di filtri viene spesso utilizzata per realizzare la controparte digitale dei filtri passa-basso (Low Pass, LP), passa alto (High Pass, HP) e passa banda (Band Pass, BP). Esistono diverse tecniche di progettazione di questi filtri. Spesso, la tecnica che si adotta è quella di partire dalla progettazione della controparte analogica di un filtro passa-basso per poi convertirlo nel corrispondente passa-basso tempo discreto mediante una serie di trasformazioni.
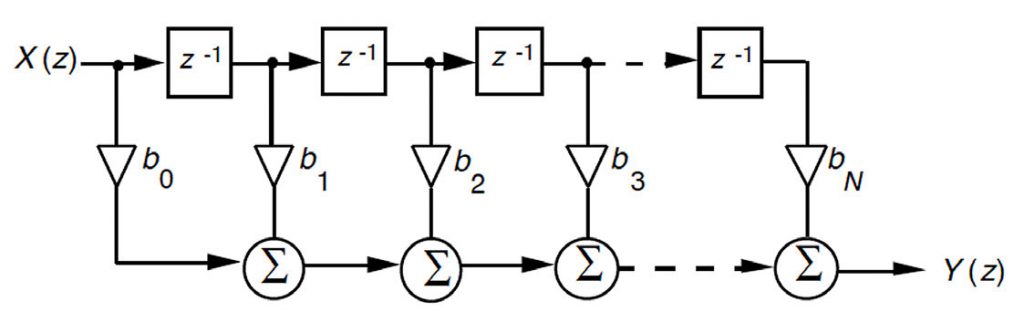
Figura 2: Rappresentazione a blocchi del Filtro
Questa tecnica viene chiamata "Trasformazione Bilineare". Lasciando al lettore l’approfondimento della trattazione puramente matematica, riportiamo una tabella riepilogativa delle principali corrispondenze. La categoria di filtri forse più interessante soprattutto in campo biomedicale è quella dei filtri adattativi che vengono spesso utilizzati per la cancellazione del rumore o per l’estrazione di particolari caratteristiche del segnale. L’utilizzo di tecniche adattative risulta molto vantaggioso perché non ha bisogno di una conoscenza a priori della natura dei disturbi o del segnale stesso. I filtri adattativi utilizzano in pratica una fase di apprendimento attraverso una stima del segnale e dell’errore che permettono per approssimazioni successive di variare i parametri del filtro seguendo la dinamica del segnale.
Tali tecniche di filtraggio sono utilizzate con successo per la rimozione del rumore dovuto al segnale di rete (5060 Hz) dal segnale ECG, per l’estrazione del battito cardiaco fetale, per la rimozione degli artefatti durante l’acquisizione del segnale. Nelle tecniche di filtraggio classico, l’assunto di base per un filtraggio ottimo e la conoscenza a priori delle caratteristiche del segnale e del rumore, è quindi ben comprensibile il vantaggio di poter avere a disposizione uno strumento come il filtraggio adattativo. Un diagramma di base per un filtro adattativo per la cancellazione del rumore può essere il seguente, in cui si considera il segnale principale s(nT) affetto da rumore non noto n0(nT) e non correlato con il segnale.
Un secondo ingresso di riferimento n1(nT) costituisce una stima del rumore. Il segnale (nT) costituisce praticamente l’errore che viene utilizzato come ingresso ausiliario del filtro per la variazione dei parametri del filtro stesso. Minimizzando iterativamente l’errore quadratico medio (metodo ai minimi quadrati LMS), in pratica si sta istruendo il filtro a sintetizzare il rumore. Un'applicazione molto frequente in campo biomedicale di questo tipo di filtri è nella rilevazione non invasiva del battito prenatale. In questa particolare applicazione il tracciato elettrocardiografico (ECG) della madre e gli artefatti da movimento costituiscono la maggiore fonte di rumore per la misurazione del tracciato ECG del feto. In questi casi, il segnale cardiografico della madre viene utilizzato come stima iniziale del rumore. Un algoritmo adattativo del tipo appena descritto viene utilizzato proprio per riuscire ad estrarre il segnale di interesse. E' possibile combinare più stadi di filtraggio adattativo per tener conto di diverse sorgenti di rumore. A titolo di esempio, nella Figura 3 l’applicazione di un filtro adattativo multistadio per la rimozione di oscillazioni della linea di base (y1) e del rumore di rete (y2). Y1 rappresenta il segnale ECG senza il rumore di rete, e Y2 è l’errore dovuto agli artefatti da movimento. Y3 infine rappresenta il segnale ECG filtrato.

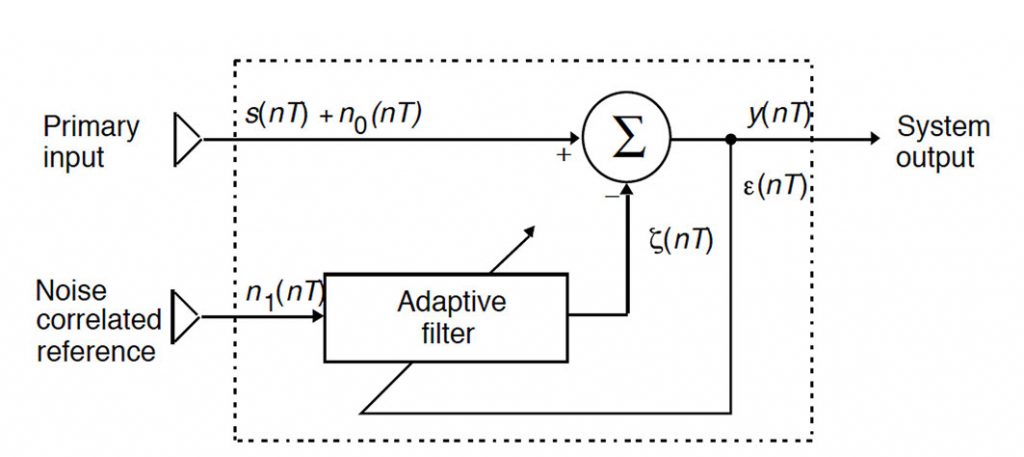
Figura 3: Filtraggio adattativo
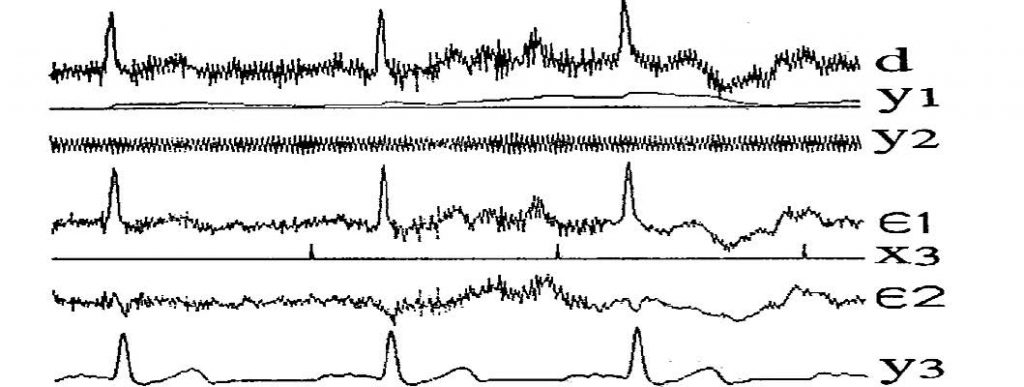
Figura 4: Applicazione di un filtro adattativo multistadio per la rimozione di oscillazioni della linea di base (y1) e del rumore di rete (y2)

