Flex Light e Demo 2 Pack è un kit che permette lo sviluppo di svariate applicazioni embedded. Evidence, con il kit Flex Demo2 Pack offre in particolare un sistema completo per controllare motori DC o servomotori.
Flex Light
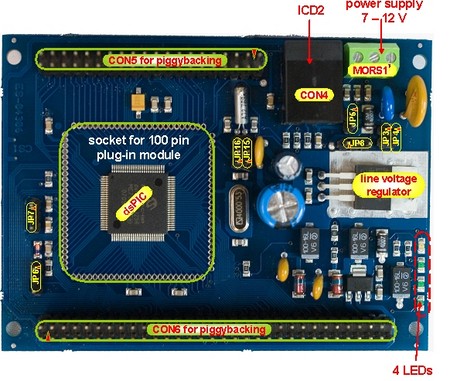
La scheda Flex Light è stata progettata per essere più compatta possibile. La versione Light utilizza un semplice circuito di alimentazione senza funzionalità integrate di programmazione USB. Esempi di applicazioni che utilizzano la scheda Flex Light sono applicazioni distribuite alimentate a batteria, come reti di sensori e piccole applicazioni robotiche. L'alimentazione della FLEX Light può essere da 9 a 12 V.
I principali componenti della FLEX Light
-
- un microcontrollore Microchip dsPIC DSC, dsPIC33FJ256MC710
- un socket per 100 pin Plug-In Module (PIM) disponibile da Microchip
- un ICD2
- connettori di alimentazione
- dei LED per monitorare lo status di funzionamento della scheda
- dei connettori per le schede figlie piggybacking
Demo 2 Pack
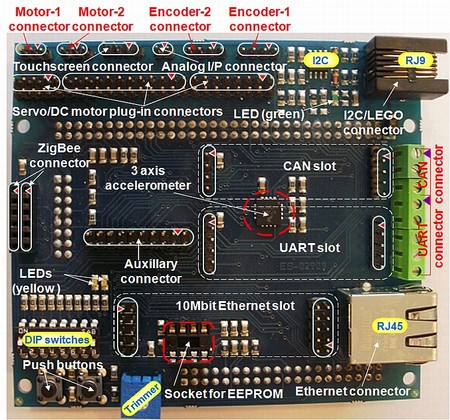
Il FLEX demo2 pack, noto anche come FLEX Motion Board Pack, è una scheda figlia di FLEX con plug-in. L'utilizzo principale della scheda FLEX Motion è appunto il motion control. Utilizzando i moduli plug-in, è possibile:
-
- controllare due motori DC e due encoder
- controllare due servo motori e un touch screen a 4 fili
Il FLEX Demo2 Pack è composto da
-
- un plug-in per il Servo Motor
- un plug-in per il motore DC
- modulo FLEX Multibus Ethernet
- modulo FLEX Multibus RS232
- modulo FLEX Multibus RS485
- modulo FLEX Multibus CAN
Lo slot UART supporta FLEX105: FLEX Multibus RS422 e FLEX108: FLEX Multibus Serial TTL Module. Questi non sono inclusi nella confezione, ma possono essere acquistati separatamente.
Con il FLEX Demo2 Pack sono possibili connessioni utilizzando varie interfacce (CAN, Ethernet, Serial (RS232, RS485, RS422), 802.15.4/Zigbee, I2C).
Ambiente di sviluppo
I prodotti Flex di Evidence possono essere integrati in ambienti di sviluppo altamente performanti. In particolare è disponibile Erika Enterprise (open source e free RTOS) con il fantastico code-generator Scicos-Flex. Sul sito indicato sono presenti anche le guide e le slide dei corsi.
Assolutamente da provare! (free e open source)
Questo KIT è uno dei Premi Qualità di Marzuino. Per averlo gratuitamente leggi il regolamento di Marzuino.
FLEX Light e Demo2 pack sono disponibili da Evidence.

un kit di tutto rispetto, ha anche l’accelerometro 🙂
come si è gia detto, è più che adatto ad applicazioni di robotica ed ha praticamente l’interfacciamento a tutto ottimo premio qualità, veramente di qualità
Interesante come piattaforma di sviluppo…poi il fatto che monti un dspic, dal mio punto di visto, lo rende ancora più allettante. Davvero un premio di quelità…aggiudicabile con la qualità! 😉
Avete visto questa applicazione?
http://www.evidence.eu.com/content/view/362/433/
Quale potrebbero essere delle applicazioni nel mondo reale?
secondo me volete viziarci troppo
E questo è solo l’inizio…..
la prima cosa che mi viene in mente è in mare, non so quali siano le problematiche legate all’equilibrio in una barca ma credo che certi oggetti se mantenuti in equilibrio siano meglio no?
altra cosa può essere livellare un fluido.. oppure un piccolo sistema che mi tiene un bicchiere in equilibrio quando sono in macchina? in questo caso mi sembra uno spreco però…
sai cosa, che dal video mi è sembrato che questo sistema non sia poi così reattivo da assicurare addirittura di mantenere in equilibrio un bicchiere contenente un liquido. Lo stesso vale per l’equilibrio in mare…verseresti comunque il tutto, e poi la superficie deve essere scivolosa rispetto all’oggetto da tenere in equilibrio. la sfera è il caso ideale, ma dove trovi un contenitore a sfera? A regime statico o per piccole variazioni dello spostamento il piano reagisce anche abbastanza velocemente, ma quando lo scostament diventa importante e soprattutto impulsivo (o a gradino), la dinamica di inseguimento del piano non è più adeguatamente veloce. Si tratta del solito sistema in retroazione negativa, in cui a gestire l’errore tra la posizione di set-point fissato dal dspic (la posizione in cui l’oggetto deve ritrovarsi a regime) e la posizione effettiva della sfera vi è un regolatore PI ( proporzionale – integrale). La componente proporzionale enfatizza l’errore conferendo alla controreazione la giusta banda passante di risposta, e quindi ne dermina anche la velocità di inseguimento della sfera, mentre la componente integrale del regolatore annulla l’errore a regime. Aumentare di tanto la componente proporzionale ti comporta una maggiore reattività del sistema ma, di contro, si possono verificare anche situazioni di instabilità o di eccessiva sovraelongazione della risposta al gradino (quindi vedremmo una sfera che prima di localizzarsi nel punto di stabilità oscilla attorno allo stesso con un ‘ampiezza che a regime si porta via via sempre più ad annullarsi). Credo che chi ha progettato il sistema si sia già confrontato con questi problemi e abbia adottato la soluzione giusta di compromesso, troppo lenta però per gli utilizzi da te citati.
Penso che un sito come Elettronica Open Source sia arrivato al punto da non poter essere confrontato con nessun altro sito simile. Contest come Febbruino ma ancora di più come Marzuino non si sono mai visti nella storia dei concorsi, e addirittura ci sarà un sequel…siete davvero troppo forti! 😉
non so, ho pensato un possibile utilizzo del sistema, non proprio quello in questione, magari con qualche miglioria e adattamento, per qualcosa può servire, non mi sembra che in mare gli sbandamenti siano troppo impulsivi… per la lattina in macchina però mi sa che hai ragione, ho sparato così senza fare troppi calcoli, non mi son ricordato di come in realtà faccio le rotatorie… 🙂
Per non essere OT, se volete potete aprire una discussione sul Forum, per farci i complimenti (scherzo) dove potrei darvi anche delle anticipazioni (dico sul serio) sui progetti (e premi) futuri. Grazie dei complimenti!
Bhè, anche un mare in tempesta richiederebbe delle risposte rapide, non credi? 😉
Hai ragione e la forza del sito è l’interdisciplinarità dei contenuti e la preparazione di molti di quelli che commentano. Commento pure’ io che sono un filosofo e non un ingegnere 😀
L’oggetto in questione dovrebbe essere sferico poichè toccando sul touchscreen il microcontrollore ne rileva la posizione e comanda i servo motori per riportare l’oggetto(la sfera) in posizione centrale!
Non saprei in cosa possa essere utile questo specifico “sistemino”, ma il kit in se apre molte prospettive di sviluppo!
Io pensavo come utilità a quando sei ubriaco ed appoggi male il bicchiere.. così non lo rovesci e continui a bere tranquillamente.
Interessante questo KIT, il fatto che ci sia un DSP mi fà pensare oltre ad applicazioni di signal processing anche ad una serie di controllli che effettuino un gran numero di calcoli di tipologia ripetitiva come i controlli di posizione o gli azionamenti di macchine utensili.
Inoltre il fatto che abbia tutte queste interfacce CAN, Ethernet, Serial (RS232, RS485, RS422), 802.15.4/Zigbee, I2C permette un’infinità di applicazione dall’automotive alla sensoristica. Sopratutto sulla sensoristica si potrebbe pensare di realizzare una rete di sensori wireless, il nodo master potrebbe essere la scheda che controlla con un algoritmo a stella tutti i suoi nodi slave che potrebbero essere dei MOTE piu’ semplici dotati di batteria.
http://arri.uta.edu/acs/networks/WirelessSensorNetChap04.pdf
E’ veramente di ottima qualità e viene regalato con una dotazione di tutto rispetto. Può essere molto utile in diversissimi campi.
Per curiosità, che dimensioni ha?
Ritornando all’argomento dei robot, per chi è appassionato questo kit è una vera manna, incredibimente pieno di funzioni ed accessori, ma è l’equilibrio è una delle sfide di chi progetta robot, ovviamente anche con i pic 😉 tanto per fare un esempio, guardatevi questo video: http://www.youtube.com/watch?v=ghB3wjm_RxE
a occhio e croce, dovrebbe essere intorno al 9×12 anche di meno ..guarda la foto c’è anche l’euro per darti un idea delle dimensioni 🙂 il cd ha il diametro di circa 11,5 cm
La filosofia aiuta a fare aprire la mente all’ingegnere, che a volte è troppo complessata =)
Si, quando lo avevamo creato originariamente era nato per afre piccoli robot semoventi (da qui i due motori con i due encoder e l’accelerometro), segway e simili!
La moneta non l’avevo proprio notata. Bè dai, a questo punto non è eccessivamente troppo. Grande il doppio di Arduino. Nemmeno così tanto se penso a tutte le cose che fa e le applicazioni in cui può essere impiegato 😉
Ciao…
Il sistema ha un PID e non un PD 🙂
Si ottengono poi prestazioni migliori con un filtro passa basso sulla derivata… Se poi si vuole starfare si può fare un controllo a variabili di stato…
Se vi interessa vedere il codice, potete trovarlo negli esempi dello Scicos Pack v9,
http://erika.tuxfamily.org/scilabscicos.html
Come si può vedere dagli schemi ScicosLab sono due PID per ciascun asse…
Ciao,
PJ
Carino! Si, di fatto noi stiamo afcendo un po’ di questi esperimenti con la Scuola S. Anna di pisa, sia come controllo remoto dei dispositivi tramite zigbee che tramite esperimenti con CAN bus, e con generazione di codice da ScicosLab.
Tra l’altro a breve ci sarà un’altro corso sull’argomento,
http://www.artist-embedded.org/artist/Overview,2225.html
Forse può interessare…
Paolo
è un po’ più piccolo… sono 88mm x 102 (la scheda alla base, la flex light, ha il lato da 72 mm che permette l’inserimento nella barra DIN…)
Ciao,
Paolo
Peccato che sia a Pisa!!!! =(
ma a chi è rivolto questo corso? io sono studente in ing elettronica a pisa, posso partecipare?
Che fico! io lo vedrei abbastanza bene su un quadricottero o su un modellino di elicottero “standard”. Stando ai commenti pare che si presti bene a controlli in controreazione! non credo che ci sia un ambito in cui la controreazione sia più importante per far funzionare bene il sistema (e non farlo precipitare)
Questa era solo un’idea, forse nemmeno la migliore, ma con tutta quella connettività può fare un mare di cose! Se non fosse altamente pericoloso sarebbe possibile anche usare il can bus per effettuare qualche controllo sulle autovetture… questa è un’altra di quelle schede che lasciano solo spazio alla fantasia!
Davvero un oggetino grazioso. Non capisco il DSP se è “specializzato” in qualche funzionalità particolare. Darò u occhio ai datasheet. Interessante anche l’interoperanilita con scicos( vedi scilab) un vecchio amore di gioventù all’università feci il matto pur di usarlo al posto di matlab 😉
Si, puoi partecipare! ricorda che c’e’ una base di conoscenze che devi avere (soprattutto programmazione C); L’idea è fare una introduzione ai sistemi real-time e ad i microcontrollori, controllo, cAN bus, ecc…
inoltre nota il corso è in inglese, c’e’ un rimborso spese per i pasti e l’affitto dei locali, e soprattutto si svolge nella settimana della luminara a Pisa!
PJ
il dsPIC che abbiamo usato è uno di quelli a 100 pin SMD con periferiche motion control.
Per quanto riguarda ScicosLab… è anche per noi una cosa bella!!! abbiamo realizzato più di 100 blocchi che funzionano in generazione automatica direttamente sul micro, per implementare controlli automatici di vario tipo (uno di questi è l’Amazing Ball citato sopra).
Ciao,
PJ
Sicuramente questo kit di sviluppo è molto interessante ,
Le sue potenzialità con introduzione di tutte quelle porte seriali ,
Ma soprattutto renderlo molto interessante è il fatto che è dotato dalla porta Ethernet che ormai è quasi indispensabile su tutti dispositivi moderni , che permette una estensione quasi infinita con altre schede di qualunque tipo anche non uguale a questa , dopo può anche darsi anche con basi di dati ad esempio in un’ottica di rilevamento di temperatura o di valori qualsiasi .
uno dei suoi problemi maggiori è il fatto che è programmabile esclusivamente via ICD2 e non possiede programmazione via usi di quindi necessario comprare o se non si possiede già MPLAB ICD 2 per effettuare la programmazione .
Questo dispositivo le applicazioni le trovo molto azzeccate per la robotica visto che ha due controlli per motori e un accelerometro con diversi Encoder che permette di rivelare l’apposizione della velocità di qualsiasi motore .
il fatto più importante sicuramente di questa scheda è la sua porta Ethernet come tutte le altre schede che ormai escono sul mercato ne possiede uno dell’importanza e della diffusione di questo standard di comunicazione che lo rende universale .
Comunque sia l’elettronica open source fanno regali bellissimi ,
il problema non è tanto il C ma l’inglese Ahia.. ! ..ho gia avuto esperienza con C all’università con il corso di Sistemi Elettronici Programmabili, (programmazione con un AtMega32 e PAL/PLD) poi ho l’esame di Informatica e Calcolatori dove si fa il C++..
come devo fare per iscrizione ecc?
Ormai l’inglese per qualsiasi ingegnereè la parte ,
non è più possibile fare ingegneria senza sapere l’inglese .
per cosa riguarda la programmazione in linguaggio C ormai è diventato il minimo indispensabile per fare qualcosa .
Inoltre PAL PLD come FPGA non si programma con il linguaggio C ma con VHDL o Verilog essendo circuiti dove dove le funzioni vengono programmate via software ma non è un microprocessore o microcontrollori .
visto che le ho fatte all’università, so benissimo che quei dispositivi non si programmano in C ma con un programma di descrizione hardware, che nel mio caso non era ne Vhdl ne verilog ma CUPL che è un HDL (Hardware Description Language) per programmare I PLD (Programmable Logic Device) ATMEL.
…volevo solo spiegare brevemente in cosa consisteva nella pratica l’esame di sistemi elettronici programmabili…
per quanto riguarda l’inglese una cosa è leggere l’inglese che bene o male capisco, e una cosa è seguire delle spiegazioni in inglese …sicuramente mi perderei per strada, non avendo per niente esperienza nel dialogare in inglese ma solo esperienze nel leggere datasheet (che spesso sono in pessimo inglese) o articoli scientifici. 🙂
Ciao, per l’iscrizione il linkd a seguire è
http://www.artist-embedded.org/artist/Overview,2225.html
poi devi seguire la tab “Applications”…
Ciao,
PJ
bello potrebbe essere usato per tante applicazioni diverse, come il controllo di robot con memoria, così da poter scrivere dei programmi per fargli fare tante funzioni diverse, come evitare ostacoli, seguire la luce, ecc.