In quasi tutte le applicazioni che prevedono l’utilizzo di un motore in continua è indispensabile conoscere la posizione dell’albero del motore. I meccanismi di misura comunemente sono semplici; si usa un potenziometro in caso di basse accuratezze ed encoder ottici per precisioni maggiori. Laddove non è possibile collegare il sensore direttamente all’albero, ad esempio in una pompa idraulica, o laddove si vuole aumentare la vita del sistema riducendo le parti meccaniche in movimento, generalmente si usano gli encoder magnetici.
Introduzione
Come accennato, quando bisogna controllare un motore in continua in posizione o quando si vogliono misurare parametri derivati da questa, come ad esempio la velocità, solitamente si ricorre a potenziometri (in un precedente articolo abbiamo visto un esempio pratico) o encoder ottici. In questa sede spenderemo due parole su questi sistemi di misura, ampiamente diffusi e conosciuti, rimandando a testi più specialistici per maggiori dettagli. I potenziometri (come quello mostrato nella figura 1) sono molto semplici da usare, si tratta banalmente di resistori variabili, pertanto, collegando l’albero d’uscita del potenziometro rigidamente all’albero d’uscita del motore, è possibile leggere la variazione di posizione di quest'ultimo in termini di variazione di tensione d'uscita di un partitore resistivo composto dal potenziometro stesso. Questo è il meccanismo alla base di quasi tutti i servo-motori in commercio (che abbiamo già visto in un precedente articolo). Al variare dell’applicazione, ovviamente, cambiano le grandezze del potenziometro, la sua resistenza nominale ed il numero massimo di giri che l’albero può fare.

Figura 1: Esempio di Potenziometro
Gli encoder ottici, invece, sono un po’ più precisi ed anche un po’ più difficili da gestire. Nel caso più semplice, ovvero di un encoder relativo, un disco bucato viene accoppiato all’albero d’uscita del motore. Ai lati del disco vengono montati un emettitore ed un ricevitore luminoso, quando la luce riesce a passare attraverso uno dei buchi presenti sul disco, questa viene percepita dal ricevitore, viceversa quando l’emettitore si trova in prossimità di una zona chiusa del disco, il ricevitore non si attiva (nella figura 2 viene mostrato uno schema di funzionamento). Comandando in modo adeguato l’emettitore e campionando ad alta frequenza il ricevitore (almeno il doppio della frequenza di rotazione del motore, più avanti in quest'articolo accenneremo all'aliasing) si riesce a ricostruire il movimento del disco in funzione del numero di volte in cui il ricevitore è stato eccitato dalla luce, ovvero di quante tacche (passi) sono passate tra ricevitore ed emettitore fra una lettura e l’altra e conoscendo il numero di tacche totali sul disco si ricava il valore relativo dell’angolo tra due misure successive o la velocità dell’albero d’uscita.
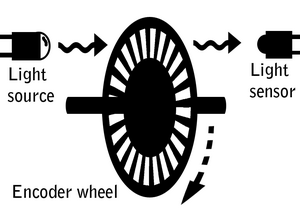
Figura 2: Esempio di Encoder Ottico
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2215 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

Edge Computing: l’apprendimento automatico ai confini della rete

Codec audio/video: cosa c’è da sapere per usarli al meglio
Il ruolo degli assistenti vocali IoT nelle case intelligenti sostenibili
L’impatto delle architetture RISC-V sull’industria dei chip

EOS-Book @2 il corso di microprogrammazione per tutti
