Non è la prima volta che si parla di OpenScad. Ormai sull'argomento è stato scritto abbastanza da sapere che senza troppe difficoltà è possibile realizzare modelli 3D semplici e facilmente modificabili. Tuttavia oggi si farà un passo in avanti, verso un progetto sicuramente più ambizioso. La stampa 3D possiede tutte le caratteristiche per adattarsi perfettamente ai prototipi di svariati progetti. In questo articolo verrà descritto passo passo come utilizzare OpenSCAD insieme ad Arduino per realizzare uno dei più famosi robot nella storia del cinema: R2D2. Se ne analizzerà il design, il codice e i collegamenti tra scheda e componenti. Il tutto per ottenere (a prezzi contenuti) un risultato finale notevole. I file da stampare e i codici completi si trovano su Youmagine, sito nel quale sono disponibili molti altri progetti.
L’idea
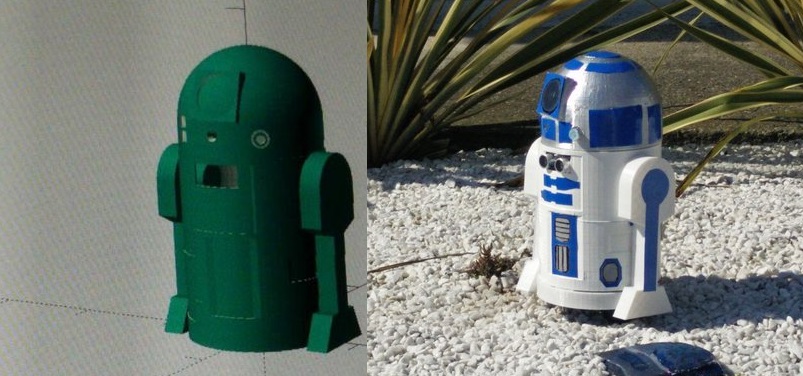
Figura 1: A sinistra il progetto compilato su openSCAD di R2D2, a destra il robot completo di elettronica
Il progetto prende forma a partire dal kit base della Pololu per robot, il quale consiste in una piattaforma con due motori passo passo collegati a due ruote per far da base ai robot. Il rapporto qualità prezzo di questo pezzo è assolutamente competitivo (Figura 1). In caso si preferisca utilizzare un'altra piattaforma sarà sufficiente modificare il primo pezzo del nostro progetto mantenendo tutti gli altri, magari si desidera avere un R2D2 più veloce o con più aderenza sui terreni, non sarà un problema in quanto le possibili modifiche sono innumerevoli e tutte facilmente inseribili, tuttavia la scelta più comoda potrebbe essere quella di usare la piattaforma della Pololu sostituendo in caso i motori o le ruote. Su internet è possibile trovare numerose alternative e se non se ne dovesse trovare una soddisfacente si possono semplicemente ordinare dei motori passo passo e le ruote per stamparne la piattaforma, d'altronde “chi fa da sé fa per tre”.
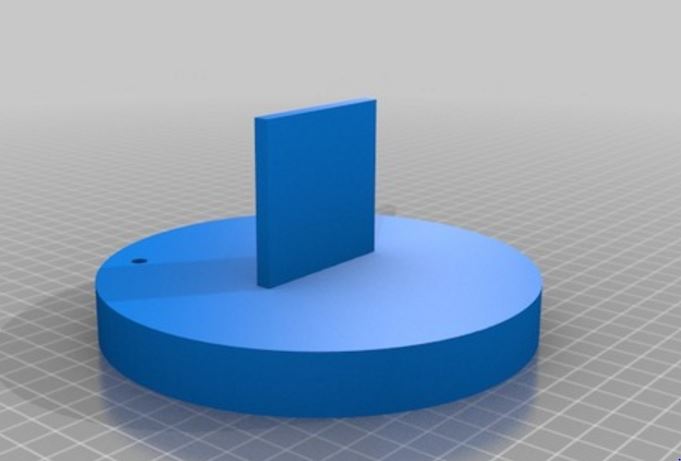
Figura 2: Il primo pezzo si incastra alla piattaforma Pololu e permette di fissare sia Arduino che la breadboard
La base mostrata in figura 2 si incastra sulla piattaforma dei motori perfettamente, il parallelepipedo è stato aggiunto per fissare da un lato la breadboard e dall'altro Arduino (verrà utilizzato Arduino Uno). I fori invece fungono da collegamento tra i motori e il driver, nel caso specifico si utilizza il ponte H L293D, ossia un integrato davvero economico e capace di controllare facilmente i motori passo passo.
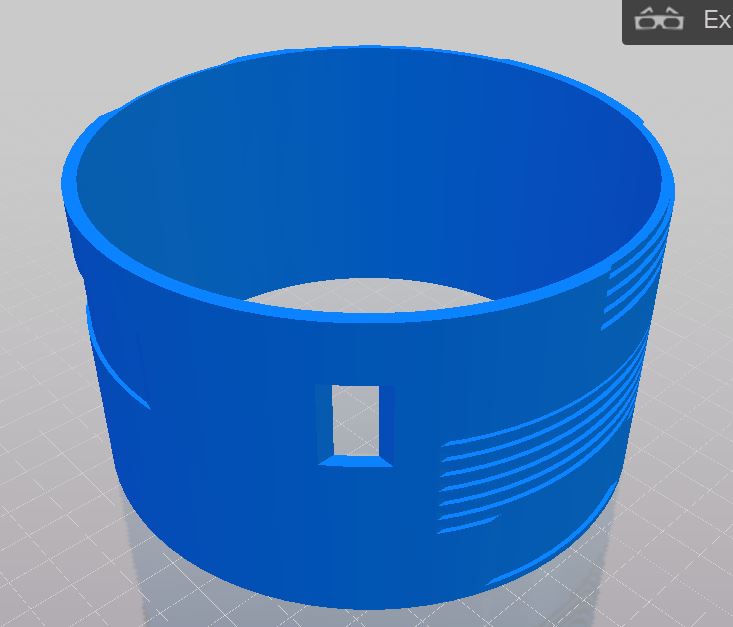
Figura 3: Il foro del pezzo mostrato in figura servirà per aggiungere un interruttore per rendere più semplice accensione e spegnimento
Le varie componenti, come si può notare in figura 3, sono state divise prima di essere stampate, questo per poter spezzare le stampe e agevolare i collegamenti elettronici. Ogni singolo pezzo è generato a partire da pure forme geometriche semplici, tutti i particolari [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3285 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

Corso di Elettronica per ragazzi – Puntata 17
Data Analysis ed Intelligenza Artificiale in Python: interpretare dati reali con Numpy, Pandas e Scikit-Learn

Misurare la corrente alternata e continua con il sensore di corrente ad effetto Hall ACS712 e Arduino
Come creare una influencer virtuale grazie all’IA

IL progetto è semplice ed è spiegato in modo esauriente. Penso di farlo realizzare ad alcuni studenti più volenterosi.