
La maggior parte della nostra percezione del robot è basata su film Hollywoodiani come i famosi robot 3CPO e R2D2 di Star Wars fino al simpatico robot mangiatore di rifiuti di nome WALL-E, dell’omonimo cartone animato; queste macchine sono un esempio di ciò che tutti noi pensiamo dovrebbe essere il robot. Anche se il robot che costruiremo qui è ancora lontano dalle tecnologie mostrate in quei film, almeno ci consentirà di introdurci al mondo della robotica. Con questo articolo inizia una serie di articoli/tutorial che ci introdurrà passo-passo nel mondo della robotica. Cominceremo realizzando PRAM, il Primo Robot Autonomo Mobile.
Introduzione
In questo primo tutorial di una serie realizzeremo PRAM, un semplice robot autonomo mobile progettato per essere facilmente costruito utilizzando uno chassis di una Smart Car a quattro ruote, simile alla Figura 1 e acquistabile in kit con pochi euro online o nei negozi specializzati, il microcontrollore uChip “cervello” di PRAM, un driver dei quattro motori della smart car, un sensore di distanza, due fotoresistenze e qualche riga di codice.

Figura 1: chassis Robot Car a quattro ruote
Il primo robot mobile autonomo è stato costruito da William Gray intorno al 1950 presso il Burden Neurological Institute di Bristol come parte della sua ricerca per modellare il neurone del cervello. Ha costruito questi robot a tre ruote denominati ELMER ed ELSIE (Electro Mechanical Robot e Light Sensitive) che sono costituiti solo da due valvole elettroniche (che rappresentano 2 semplici neuroni) funzionanti come amplificatori a due stadi per controllare un relè collegato ai due motori a corrente continua utilizzati per lo sterzo e la locomozione del robot, come mostrato nello schema funzionale a blocchi di Figura 2. Si consideri che a quell’epoca i transistor erano solo nelle fasi iniziali, e nella foto del prototipo del robot Elsie di Figura 3.
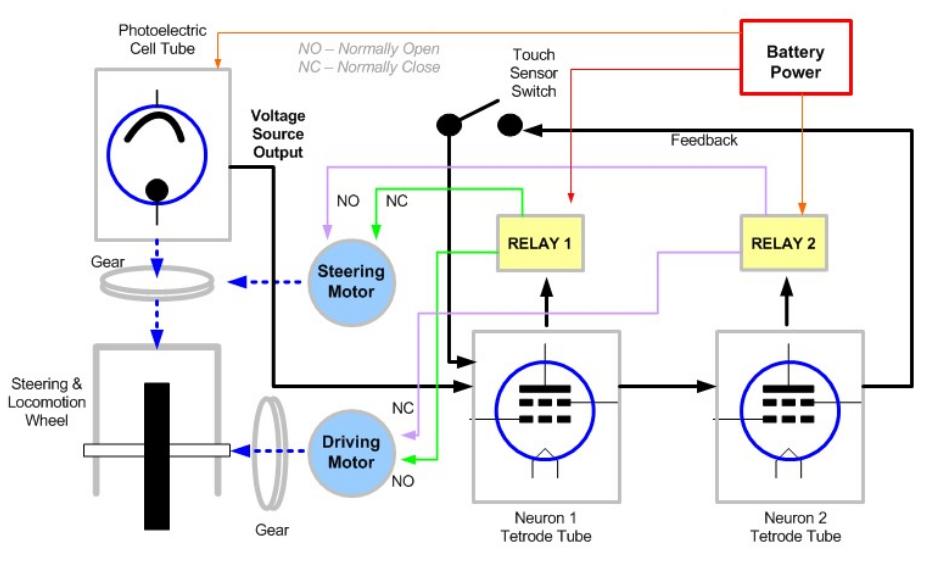
Figura 2: schema a blocchi del robot di William Gray
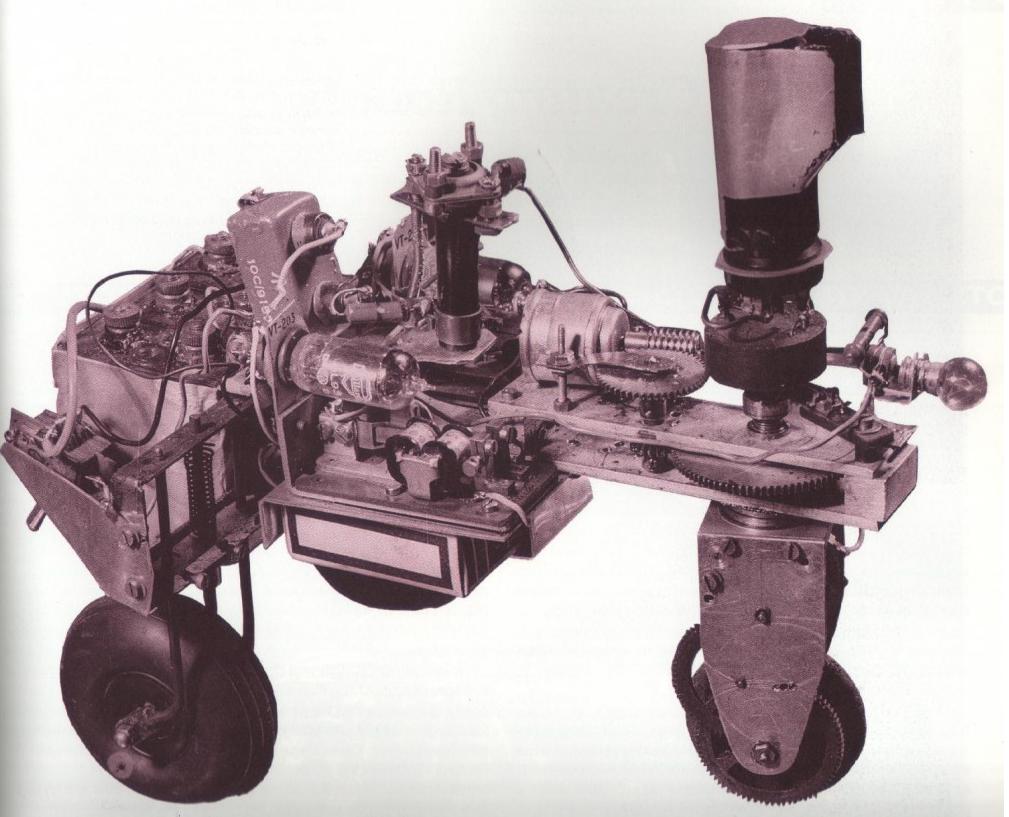
Figura 3: prototipo del robot Elsie
Il motore dello sterzo è collegato anche al sensore della fotocellula e ruota solo in una direzione. In ambiente buio lo sterzo e il motore di guida girano lentamente; quando la cellula fotoelettrica cattura luce sufficientemente intensa, il motore dello sterzo smette di ruotare (relè 1 acceso) e il robot si muoverà verso di essa. Quando la luce diventa troppo luminosa, il motore dello sterzo inizia a ruotare (relè 2 acceso) e il robot si allontana semplicemente dalla luce. L'interruttore del sensore tattile è collegato al guscio di plastica trasparente che copre il corpo del robot. Quando il guscio urta contro l'oggetto, l'amplificatore a due stadi inizia ad oscillare a causa del segnale di feedback generato dall'interruttore a sfioramento fino a quando il robot eviterà con successo l'ostacolo. Utilizzando solo un semplice modello di neuroni elettronici, William Gray Walker è stato in grado di mostrare un comportamento complesso causato dalla combinazione di stimoli (sensori) e dall'interazione tra questi due neuroni elettronici. I suoi lavori, in seguito, hanno ispirato molti ricercatori di robotica della giovane generazione, che hanno aperto la strada a un nuovo approccio all'Intelligenza Artificiale del robot, noto come Intelligenza Artificiale basata sul comportamento della natura.
Ciò che rende la realizzazione di un robot un'arte è la combinazione di abilità meccaniche, elettroniche e di programmazione; queste abilità devono anche essere coordinate mediante il controllo del sistema e la conoscenza dell'Intelligenza Artificiale per creare un robot intelligente e affidabile. Molti anni fa, questo tipo di capacità risiedeva solo all'interno dei laboratori universitari o di società di ricerca ad alto budget. Oggi, con l'introduzione di sofisticati microcontrollori e sensori economici, la possibilità per i robotisti dilettanti di costruire robot divertenti ma anche professionali diventa ampiamente aperta; in particolare, con l'introduzione all'Intelligenza Artificiale su base naturale ampiamente sperimentata, si apre un nuovo approccio al robot mobile intelligente e programmabile alla portata degli appassionati di robotica, anche dilettanti. Questo approccio, in realtà, si basa sulla semplice domanda: “perché un semplice animale come la formica o lo scarafaggio può sopravvivere in un ambiente naturale complesso e, tuttavia, non richiede un cervello altrettanto complesso?”.
La risposta a questa domanda è: “perché queste piccole creature usano ciò che viene chiamato comportamento intelligente basato sulla natura”; a differenza del classico approccio all'Intelligenza Artificiale che richiedeva una grande potenza di calcolo, questo nuovo approccio ci consente di implementarlo su hardware anche di non elevata potenza di calcolo, come ad esempio i microcontrollori. Questo modello artificiale intelligente basato sul comportamento ci dice semplicemente che è possibile sviluppare il comportamento del robot partendo da una forma molto primitiva di comportamento come quello di evitare gli ostacoli a cui aggiungere su di esso gradualmente un nuovo comportamento più complesso. In questa prima parte del tutorial descriveremo le fasi di assemblaggio dello chassis del robot smart car e il progetto di PRAM, attraverso l’analisi dello schema elettrico.
ASSEMBLAGGIO DELLO CHASSIS DELLA SMART CAR
Se avete acquistato un kit di una smart car simile a quella mostrata in Figura 1, nella confezione troverete tutte le parti necessarie alla costruzione dello chassis della smart car, ossia, i 4 motori, le quattro ruote, i quattro encoder per il controllo della velocità (poi ne parleremo nelle parti successive), due piattaforme per l’alloggiamento del porta batterie, della scheda di controllo del robot, degli eventuali sensori ed altro ancora. In Figura 4 sono mostrate le parti incluse nel kit. [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 1782 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Computer Vision 1.03 – Features extraction

Progetto di un sistema di allarme di terremoti con Arduino – Parte 3

Retrogaming: Nintendo NES, mini Pac-Man
Realizziamo un software per Raspberry che calcola il proprio bioritmo

Cosa è la Lightning Network e cosa rappresenta per il futuro della blockchain
