Il rilevamento dei pedoni costituisce una sfida cruciale nella sicurezza automobilistica e nell'assistenza alla guida. Fondamentale nei sistemi avanzati di assistenza alla guida, questo processo è soggetto a numerosi approcci di ricerca. Gli studiosi propongono soluzioni variegate in termini di metodi, scenari, descrittori di caratteristiche, schemi di classificazione, prestazioni e complessità computazionale. Tuttavia, nonostante gli sforzi, l'accuratezza del rilevamento rimane insoddisfacente. Il rilevamento sicuro e in tempo reale di pedoni in scenari stradali reali, anche a risoluzione standard, si rivela ancora un traguardo difficile. Nell'industria automobilistica, i sistemi critici devono rispettare standard consolidati, come ISO26262, e il rilevamento pedonale, essendo cruciale per la sicurezza, deve aderire a tali normative, prima dell'integrazione nei veicoli. In questo articolo, esamineremo le varie tecniche per il rilevamento dei pedoni nell'ambito automobilistico.
Introduzione
I sistemi avanzati di assistenza alla guida (ADAS) aiutano il conducente a comprendere meglio l'ambiente circostante e, in particolare, la strada davanti al veicolo. Gli errori umani nel notare i veicoli, i pedoni, i ciclisti e altri oggetti (come segnali stradali, entità a bordo strada, ecc.) davanti al veicolo possono causare incidenti e gravi vittime. Si tratta quindi di un insieme di soluzioni intelligenti incorporate nei veicoli di nuova generazione per aiutare il conducente a guidare in modo sicuro ed evitare incidenti, vittime e perdite. L'ADAS ha lo scopo di evitare queste situazioni. Il sistema monitora la strada davanti a sé e informa il conducente di qualsiasi possibilità di collisione. Il primo passo sarà informare il conducente, ma come passo successivo, il sistema ADAS può prendere il controllo del veicolo per evitare una collisione. In caso di collisione inevitabile, gli ADAS si adoperano per ridurre al minimo le vittime.
Gli ADAS si dividono in due parti: sicurezza attiva e sicurezza passiva; possiamo vedere la differenza in Figura 1.
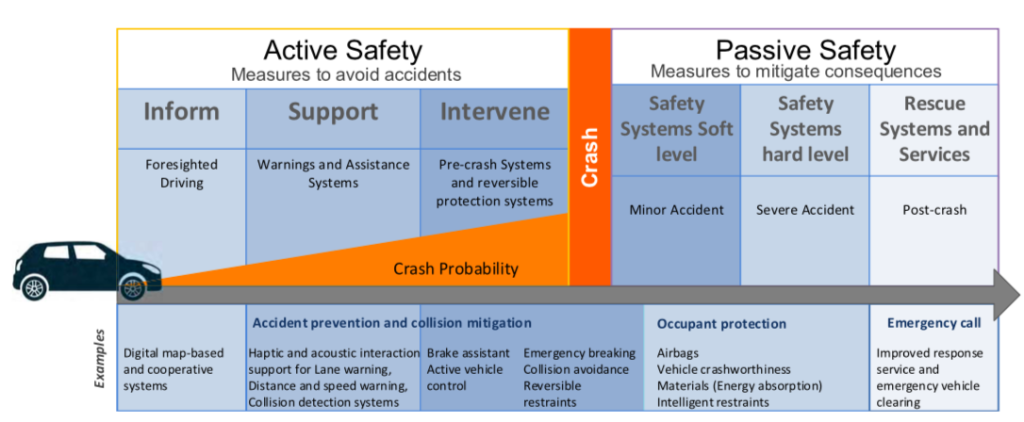
Figura 1: Advanced Driver Assistance System (ADAS) (Credit: Pedestrian Detection in Automotive Safety: Understanding State-of-the-Art N. K. RAGESH, AND R. RAJESH
La sicurezza attiva comprende le misure per evitare una collisione, mentre la sicurezza passiva si occupa delle misure per ridurre al minimo le vittime in caso di collisione inevitabile. Il rilevamento dei pedoni fa parte delle misure di sicurezza attiva o del sistema anticollisione.
La sicurezza dei pedoni è uno dei principali obiettivi dei sistemi avanzati di assistenza alla guida. Le informazioni fornite dal sistema possono salvare la vita dei pedoni, ma se il sistema fornisce informazioni errate o non funziona come dovrebbe, può causare gravi lesioni o la morte dei pedoni e dei passeggeri del veicolo. A causa di questa natura critica per la sicurezza, l'affidabilità del sistema è di estrema importanza e quindi il sistema deve essere conforme a standard di sicurezza rigorosi come ISO26262.
Il rilevamento dei pedoni rappresenta un tipico problema di rilevamento degli oggetti nell'elaborazione digitale delle immagini. La presenza di pedoni può essere identificata dalle immagini catturate attraverso le telecamere montate sul veicolo, applicando tecniche intelligenti di elaborazione delle immagini. Una volta identificata la presenza di un pedone, il conducente del veicolo viene informato con un meccanismo di avviso, che comprende una presentazione audiovisiva e avvisi meccanici come la vibrazione del volante o del sedile.
Tecniche di elaborazione
Le fasi di elaborazione coinvolte nel rilevamento dei pedoni sono le stesse di qualsiasi altro sistema di rilevamento di oggetti. Oggetti simili con una forma predefinita possono essere rilevati attraverso una tecnica semplice come la corrispondenza dei modelli. Ma i pedoni possono essere in piedi o in movimento in qualsiasi direzione, quindi le possibilità di forma del pedone sono illimitate. Il diverso stile e colore dei vestiti rende estremamente complesso rappresentare i pedoni con una serie unica di modelli. Dovremo quindi utilizzare tecniche più complesse per rilevare oggetti complessi come un pedone.
Il rilevamento di oggetti complessi nell'elaborazione delle immagini può essere implementato tipicamente in due modi: un classificatore basato su caratteristiche predefinite o un classificatore con caratteristiche autoapprese. L'approccio del classificatore di caratteristiche predefinite è l'approccio classico, ancora utilizzato, mentre recentemente è stata data maggiore attenzione al rilevamento e alla classificazione degli oggetti basati sul Deep Learning. Entrambi gli approcci procedono in parallelo, con alcuni tentativi di combinare i vantaggi di entrambi. Entrambi gli approcci si basano sull'addestramento, cioè, il sistema di rilevamento dei pedoni viene prima addestrato con un gran numero di oggetti noti, pedoni e non pedoni, e da questi campioni vengono ricavate rappresentazioni/modelli di oggetti generici, pedoni e non pedoni. Un classificatore utilizza quindi questi modelli generici per identificare se un oggetto di interesse è un pedone o meno, trovando una corrispondenza con questi modelli.
Nell'approccio del classificatore di caratteristiche (FC), vengono utilizzate caratteristiche predefinite per rappresentare gli oggetti pedonali e un classificatore classifica un oggetto come pedone o meno in base alla somiglianza delle caratteristiche dell'oggetto di interesse con quelle del modello pre-addestrato. L'attenzione si concentrerà sul modo in cui si può ricavare la migliore caratteristica per distinguere un oggetto pedonale da altri oggetti e sul modo in cui si arriva al miglior modello pre-addestrato per corrispondere alle caratteristiche dell'oggetto di interesse. La prima parte si occupa di ricavare e mettere a punto le caratteristiche, mentre la seconda parte si occupa di sviluppare un buon algoritmo di addestramento e classificazione. Oltre all'uso delle migliori caratteristiche, per un rilevamento accurato degli oggetti pedonali è importante anche un classificatore adeguato, addestrato con il miglior set di dati rappresentativo dei pedoni.
Nell'approccio Deep Learning (DL) non esistono caratteristiche predefinite. Il sistema apprende da solo le caratteristiche migliori per classificare i campioni di addestramento. In questo caso, il set di addestramento è molto più importante delle caratteristiche. Tuttavia, con un set di addestramento molto rappresentativo, un sistema basato su DL può superare un sistema basato su FC.
Requisiti di sistema
Nel settore automobilistico, il rilevamento in tempo reale, la sufficiente accuratezza, il minimo ingombro di memoria e i requisiti computazionali sono importanti per sviluppare un sistema pratico di rilevamento dei pedoni, poiché si tratta di un problema critico per la sicurezza.
L'approccio tipico è quello di avere un'unità di controllo del motore (ECU) separata dagli ADAS. Tuttavia, la tendenza attuale è quella di combinare il Vehicle Infotainment, l'Instrument Cluster e ADAS in un unico modulo chiamato eCock-pit, per ottenere la migliore integrazione e sincronizzazione. La piattaforma hardware deve essere scelta con cura per facilitare il supporto dell'unità centrale di pre-elaborazione multi-core, cioè la CPU, e dell'unità di elaborazione grafica multi-core, cioè la GPU, per l'elaborazione ADAS, che è computazionalmente complessa. Gli algoritmi ADAS devono essere ottimizzati per l'hardware in modo da fornire una risposta in tempo reale al conducente. Inoltre, qualsiasi sistema automobilistico deve essere progettato con requisiti di elaborazione minimi, in modo da limitare il carico sulla batteria e sull'alternatore del veicolo per migliorare il consumo di carburante.
Un'altra considerazione importante nel settore automobilistico è la capacità di lavorare in condizioni climatiche difficili. La maggior parte dei sistemi basati sulla sola visione fallisce in questo ambito, poiché sono progettati per funzionare in ambienti con luce diurna o ben illuminati. Tuttavia, la combinazione di algoritmi basati sulla visione con approcci basati su RADAR e LIDAR aiuterà a soddisfare questo requisito.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 1995 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Progetto di un amplificatore a basso rumore
I microfoni Mems e le loro configurazioni beamforming
Realizzare un Amplificatore Differenziale BJT con LTspice
Telecamera per impieghi automotive: note di progettazione
