
Un interruttore meccanico offre solo una o poco più di una funzione. Il discorso è totalmente diverso quando si parla di una soluzione elettronica con microcontrollore: questo tipo di soluzione offre un’ampia gamma di soluzioni e funzionalità. In questo modo si realizzano display LCD, LED, pulsanti o anche interfacce per sistemi di controllo.
Non esistono più gli interruttori classici di una volta, anzi, i pulsanti possono essere attivati in maniera assolutamente individuale. Vengono incassati e installati e si adattano al comando corrispondente potendo essere persino application-oriented. Una variante della tecnologia touch è la tecnologia Capacitive Touch Sensing, nella quale attraverso una piastra conduttore, posta sul PCB, una superficie di contatto e dal dito si forma un condensatore. Rispetto alla tecnologia touch “semplice” che necessita di una superficie attiva, come un quadro touch, uno schermo touch o un touchpad, questo tipo di tecnologia offre un’ampia gamma di vantaggi: non c’è nessun spreco dovuto alla mancanza di parti mobili e la superficie rigida e liscia fatta di vetro, plexiglas e plastica o altri materiali isolanti è ideale per essere formata e colorata a piacimento. Microchip offre una soluzione con molteplici varianti che si basano sulla tecnologia Capacitive Touch Sensing. Questa soluzione “mTouch” può essere utilizzata dagli sviluppatori senza licenza.
Come funziona
I principali componenti di questo tipo di tecnologia sono il sensore touch, la circuiteria per l’oscillatore a rilassamento, la misurazione della frequenza e il software (figura 1).
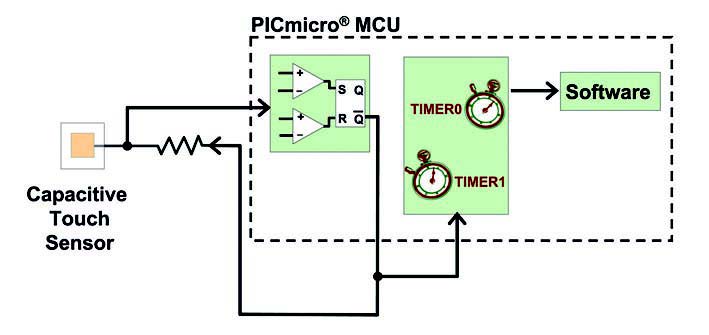
Figura 1: i principali componenti di un sistema touch sensing capacitivo.
Il sensore touch è composto da un PCB, un PAD e da una superficie di vetro o di plastica (figura 2).
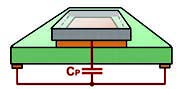
Figura 2: il sensore touch è composto da un PCB, un PAD e da una superficie di vetro o di plastica.
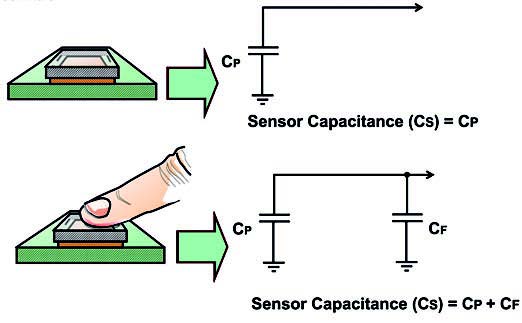
Figura 3: il circuito corrispondente del sistema con o senza dito.
Dalla nota formula elettrotecnica (C=ε0εrA/d) la capacità di un condensatore dipende dalla superficie (A), dalla distanza tra gli elettrodi (d) e dal materiale dielettrico (ε0; εr). Un dito posizionato sul sensore rappresenta una capacità parallela (CF), e modifica la capacità del sistema (CP diventa CS), come rappresentato nel circuito corrispondente. La soluzione consiste nel misurare la variazione di capacità del sistema causato dal tocco del dito in un breve intervallo di tempo. Nei prodotti “mTouch” questa soluzione viene implementata attraverso il metodo dell’oscillatore a rilassamento. Allo scopo viene usato un circuito RC e un circuito di oscillazione. Se il dito tocca la superficie la capacità del sistema aumenta, e quindi la frequenza diminuisce (figure 4 e 5).
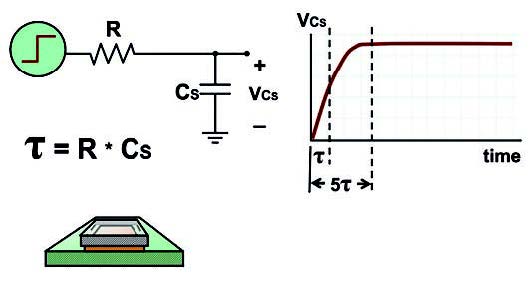
Figura 4: se il sensore non viene toccato la capacità è piccola e VCS sale velocemente.
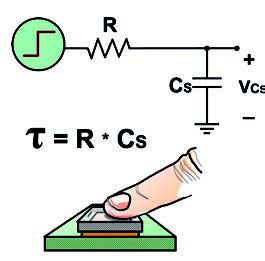
Figura 5: se il dito tocca il sensore, la capacità aumenta e la VCS sale più lentamente.
Il cambiamento della frequenza può essere visto sul circuito dell’oscillatore (figura 6).
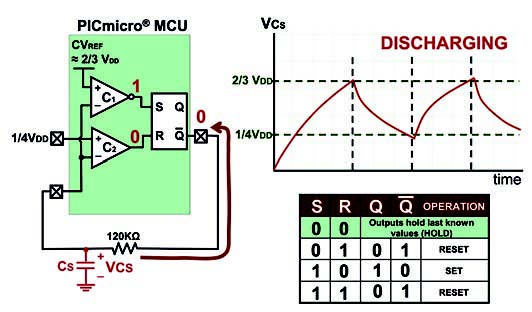
Figura 6: il cambiamento della frequenza può essere visto sul circuito dell’oscillatore.
Il passo successivo è misurare il cambiamento. Questo è eseguito per mezzo del Timer0, il quale fornisce la base dei tempi fissa, ed dal Time1 (figura 7).
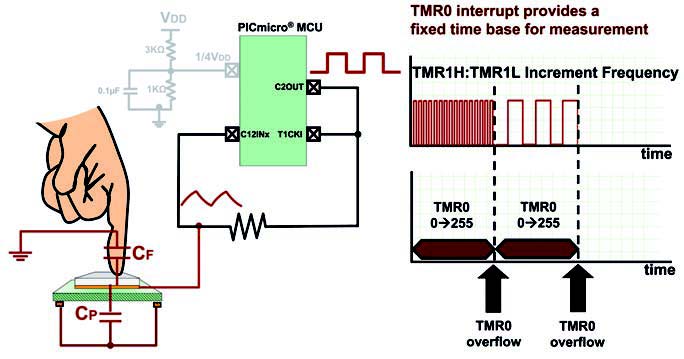
Figura 7: la misurazione della variazione di frequenza
Il software-algoritmo valuta i risultati del timer, con l’aiuto di due variabili (average, raw) e di una costante (trip) si può determinare se si è verificato un contatto o meno (figura 8).
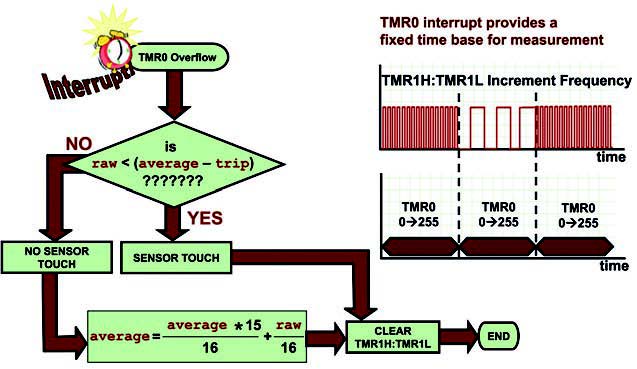
Figura 8: il software-algoritmo determina se si è verificato un contatto o meno.
Nel caso in cui venga utilizzato un microcontrollore 8Bit PIC possono essere utilizzate fino ad un massimo di quattro superfici (PADS). Nel caso in cui si utilizzino più di quattro interruttori è necessario un multiplexer. In pratica quattro user interface possono essere estesi a dieci user interface se la frequenza di utilizzo di un user interface è presa in considerazione (figura 9).
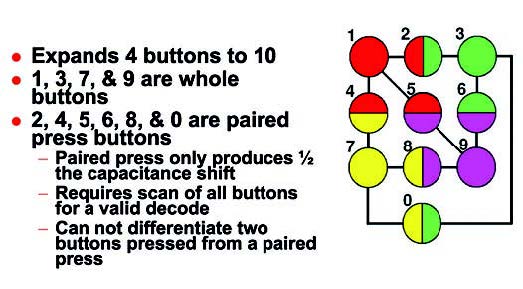
Figura 9: estensione di una user interface.
Il metodo sopra citato può essere attuato su ogni microcontrollore PIC che incorpora un comparatore e una periferica SR latch. Anche con un piccolo microcontrollore PIC, ad esempio il PIC10Fxxx si può realizzare il “mTouch”, in questo caso solo con un comparatore e con un software più costoso. Ciò significa che una user interface robusta ed user-friendly può essere implementata in questo modo, a bassi costi e senza particolari componenti. Tuttavia qualche considerazione, in merito a questa tecnologia, è necessario tenere a mente:
» l’ambiente nel quale viene utilizzato l’interruttore. Il sensore rappresenta un condensatore e e quindi fattori come umidità, spruzzi d’acqua, sporcizia, ecc..., modificano il dielettrico e quindi la capacità. Non considerare questi fattori nei calcoli vuol dire che i risultati non rispecchiano la realtà;
» il materiale della superficie non può essere metallo perché tra il dito e il PAD può trovarsi solo un dielettrico al fine di avere una capacità. Un ulteriore sviluppo del “mTouch” è rappresentato dalla soluzione con una CTMU (Unità di misura del tempo di carico). Questo tipo di soluzione è utile per un metodo di misurazione più preciso e offre delle opzioni in più per analisi ulteriori. Inoltre possono essere realizzati più interruttori. In molti PIC 16-bit e negli 8-bit di ultima generazione la CTMU è un modulo hardware offrendo quindi maggiore flessibilità nello sviluppo di nuovi sistemi di controllo. La tecnologia touch, grazie a un largo spettro di opzioni offerte, è particolarmente adatto per white goods, tali come lavastoviglie, lavatrici e macchine del caffè. Ma anche nelle applicazioni industriali dove avere una superficie di comando ottimale e adeguata può portare grandi vantaggi. Il tallone di Achille della tecnologia touch è la sua sensibilità nei confronti delle particelle impure e degli spruzzi d’acqua. In questi ambiti applicativi la tecnologie touch-inductive è l’alternativa migliore. Non soltanto è insensibile alle influenze dell’ambiente, ma consente anche di avere una superficie in metallo.


Molto interessante la tecnica basata sull’oscillatore a rilassamento e sulla misura della sua frequenza per determinare il contatto. Degno di nota anche il fatto che questo tipo di circuito, come la libreria software a corredo dello stesso, sono liberamente utilizzabili.