Ormai sono molti i sistemi per controllare un dispositivo a distanza senza fili, per esempio i moderni telefoni si connettono con la rete con il sistema WI-FI oppure tramite Bluetooth.
Esiste, però, un modo ancora più economico ed è quello tramite raggi infrarossi.
Quasi tutte le apparecchiature audio e video sono controllate in questo modo, per cui i componenti necessari sono abbastanza a buon mercato, ed il sistema è ideale per l'utilizzo nel campo della robotica o dell’automazione.
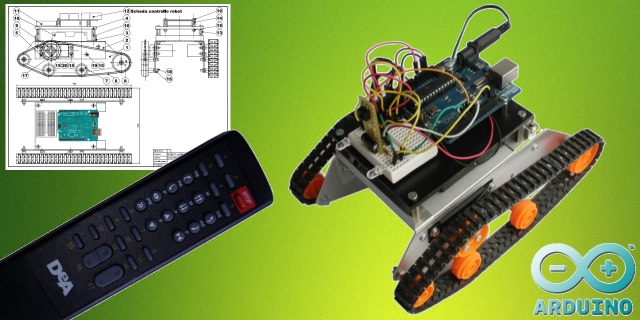
In quest’articolo analizzeremo come funziona un sistema di controllo a infrarossi, costruiremo un semplice robot cingolato e comanderemo l’azionamento dei servomotori di movimento tramite una scheda Arduino, utilizzando un sensore infrarosso e un telecomando.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3842 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Nuove soluzioni per migliorare prestazioni ed efficienza energetica negli EV

Esploriamo i limiti di Arduino: computing ad alte prestazioni ed elaborazione parallela
OpenMV Cam: l’Arduino della visione artificiale

Questo mi era sfuggito ma come sempre adrirobot fa degli articoli mostruosi.
Applausi.
Grazie Giorgio!
intanto complimenti. poi volevo chiedere perchè 100 Hz e non 50?
Cosè il robot panettone della deagostini?
Anche se con estremo ritardo, eccomi a rispondere alle tue domande.
Effettivamente se si considerano solo le vecchie lampade a incandescenza il valore corretto e 50 Hz, mentre se per esempio si considerano le lampade a scarica alimentate in tensione alternata queste, si accendono e si spengono con una frequenza di 100 Hz, cioè ogni cambio di polarità della tensione.
Per quanto riguarda il Panettone, che fu così chiamato amichevolmente per via della sua forma, era un robot i cui particolari dal dicembre del 2001, per opera della De Agostini (ora in edicola si trova il robot Robi), erano venduti in edicola allegati a 50 fascicoli a cui se ne aggiunsero altri 15, al costo di 8 euro.
Oltre ai particolari del telaio furono fornite le schede che erano già assemblate. Il cuore del robot era la scheda madre realizzata per la DeAgostini dalla Parallax e basata sul processore Basic Stamp 2. Questo processore era un piccolo modulo realizzato in un dual Inline Package (DIP) a 24pin, disponeva di 16 linee I/O digitali. La sua programmazione era effettuata usando una versione proprietaria del noto linguaggio BASIC chiamata PBASIC, il cui interprete dei comandi risiedeva nel microcontrollore un PIC16C57C, sul modulo ed erano anche presenti una EEPROM e una semplice interfaccia per il dialogo RS232. Puoi trovare maggiori informazioni nell’articolo
http://it.emcelettronica.com/sito-appassionati-di-robotica-non-solo
Oppure nell’apposita sezione a lui dedicata del mio sito
http://www.adrirobot.it/menu_new/index/index_panettone.htm