
I sensori magnetici rivestono una importanza fondamentale in numerose applicazioni nei settori dell’elettronica di consumo, automotive, industriale e robotica. Assenza di parti meccaniche in movimento, elevata robustezza e affidabilità sono caratteristiche che rendono questa classe di sensori la soluzione ideale per il rilevamento della posizione e del movimento anche in contesti particolarmente critici.
Introduzione
I sensori magnetici sono dei componenti elettronici allo stato solido che generano in uscita un segnale elettrico funzione del campo magnetico applicato al sensore. Il segnale elettrico può essere ulteriormente processato da un opportuno circuito di amplificazione e condizionamento del segnale, in modo tale da generare un segnale di uscita con la forma desiderata (ad esempio, uscita analogica, uscita digitale, uscita PWM, o altro ancora). Uno dei tipi più comune di sensore magnetico è il sensore a effetto Hall, in cui la tensione di uscita è funzione della densità del flusso magnetico. Quando, infatti, la densità del flusso magnetico provocato dall’applicazione di un campo magnetico esterno, supera una determinata soglia, il sensore genera una tensione di uscita di opportuno valore. Tale tensione viene anche detta “tensione Hall”. I sensori a effetto Hall rivestono un importante ruolo in numerose applicazioni, come ad esempio sensori di prossimità, interruttori, sensori di posizione, sensori per il rilevamento della velocità angolare e altro ancora. Il cuore del sensore è costituito da un sottile foglio di materiale conduttivo, i cui terminali di uscita sono posti perpendicolarmente alla direzione del flusso di corrente. Quando è sottoposto a un campo magnetico, l’elemento Hall genera una tensione proporzionale all’intensità del campo magnetico. Tale tensione ha valore molto ridotto, dell’ordine di qualche µV, pertanto si rende necessario introdurre un opportuno circuito di amplificazione del segnale. L’insieme composto dall’elemento Hall e dal circuito di amplificazione e condizionamento del segnale prende il nome di sensore a effetto Hall. I principali vantaggi offerti dalla tecnologia dei sensori magnetici possono essere così sintetizzati:
- componenti elettronici interamente allo stato solido;
- lunga durata;
- elevata frequenza di commutazione (100 kHz o superiore);
- assenza di parti in movimento;
- ingresso e uscita con logiche compatibili;
- ampio range di temperatura (da -40°C a +150°C);
- elevata ripetitività del funzionamento.
Principio di funzionamento
I sensori a effetto Hall basano il proprio principio di funzionamento sull’effetto Hall, un fenomeno scoperto dal fisico americano Edwin Hall nel 1879. Mentre stava studiando la fisica dell’elettrone, Hall scoprì che quando un magnete è posto in modo tale che il suo campo magnetico è perpendicolare al piano di una sottile lamina d’oro percorsa da corrente, alle estremità opposte della stessa si genera una differenza di potenziale. La tensione generata risulta inoltre essere proporzionale sia all’intensità della corrente che all’intensità del campo magnetico. Nonostante si trattasse di un’importante scoperta, l’effetto Hall trovò applicazioni pratiche soltanto 70 anni dopo. I primi sensori a effetto Hall erano condizionati da un costo elevato ma, con il progredire dell’elettronica allo stato solido, è stato possibile realizzare sensori a basso costo prodotti su larga scala. In Figura 1 possiamo osservare una schematizzazione dell’effetto Hall: la tensione di uscita è direttamente proporzionale sia alla corrente I che all’intensità B del campo magnetico.

Figura 1: rappresentazione dell’effetto Hall
In Figura 2 possiamo invece osservare lo schema a blocchi di un sensore a effetto Hall. Il cuore del sensore, l’elemento Hall, viene ricavato direttamente sul supporto di silicio. La tensione di uscita viene amplificata da un amplificatore differenziale e in molti casi viene applicata anche una compensazione della temperatura. Il regolatore posto in ingresso serve invece a stabilizzare la corrente applicata all’elemento Hall. È, infatti, importante che tale corrente si mantenga costante al variare della tensione di alimentazione, in modo tale che l’uscita dell’elemento Hall rifletta soltanto le variazioni del campo magnetico. In assenza di campo magnetico, la tensione Hall (VH in Figura 1) è nulla. Si noti come ad essere nulla sia la differenza di potenziale misurata ai capi del sensore; se si misura invece la tensione tra ogni terminale di uscita e massa, si ottiene un valore diverso da zero noto come tensione di modo comune (CMV, acronimo di Common Mode Voltage), uguale per entrambi i pin di uscita. Questo è il motivo per cui l’amplificatore di Figura 2 deve essere di tipo differenziale, in modo tale da amplificare soltanto la differenza di potenziale (la tensione Hall, appunto).
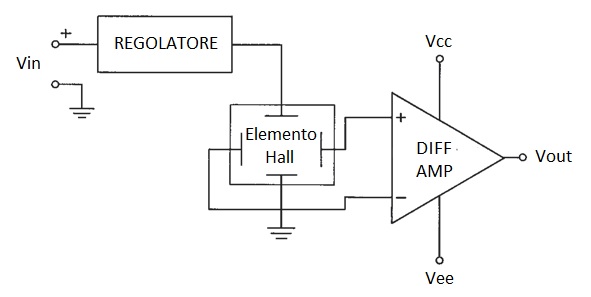
Figura 2: schema a blocchi di un sensore Hall
La tensione Hall è un segnale con ampiezza molto ridotta, dell’ordine di qualche decina di microvolt in presenza di un campo magnetico con intensità pari a un Gauss. Si rende quindi necessario aggiungere un amplificatore differenziale, che deve possedere caratteristiche di basso rumore, elevata impedenza di ingresso, guadagno non particolarmente elevato e compensazione integrata della temperatura.
Sensori analogici e digitali
Quello schematizzato in Figura 2 è un tipico esempio di sensore con uscita analogica. Questa classe di sensori genera una tensione di uscita proporzionale all'intensità del campo magnetico applicato. Poiché il campo magnetico misurato può essere sia positivo che negativo, l’uscita dell’amplificatore sarà anch’essa positiva oppure negativa, richiedendo a priori un’alimentazione duale. Per evitare di utilizzare due alimentazioni, si introduce nell’amplificatore differenziale un offset fisso, che può essere misurato all’uscita del sensore in condizioni di campo magnetico nullo; tale valore di tensione, positivo, viene anche detto “null voltage”. Quando al sensore è applicato un campo magnetico positivo, l’uscita si porta a un valore superiore alla “null voltage”. Viceversa, quando è applicato un campo magnetico negativo, l’uscita decresce scendendo al di sotto della “null voltage” ma mantenendosi comunque positiva. Questi concetti sono sintetizzati graficamente in Figura 3.
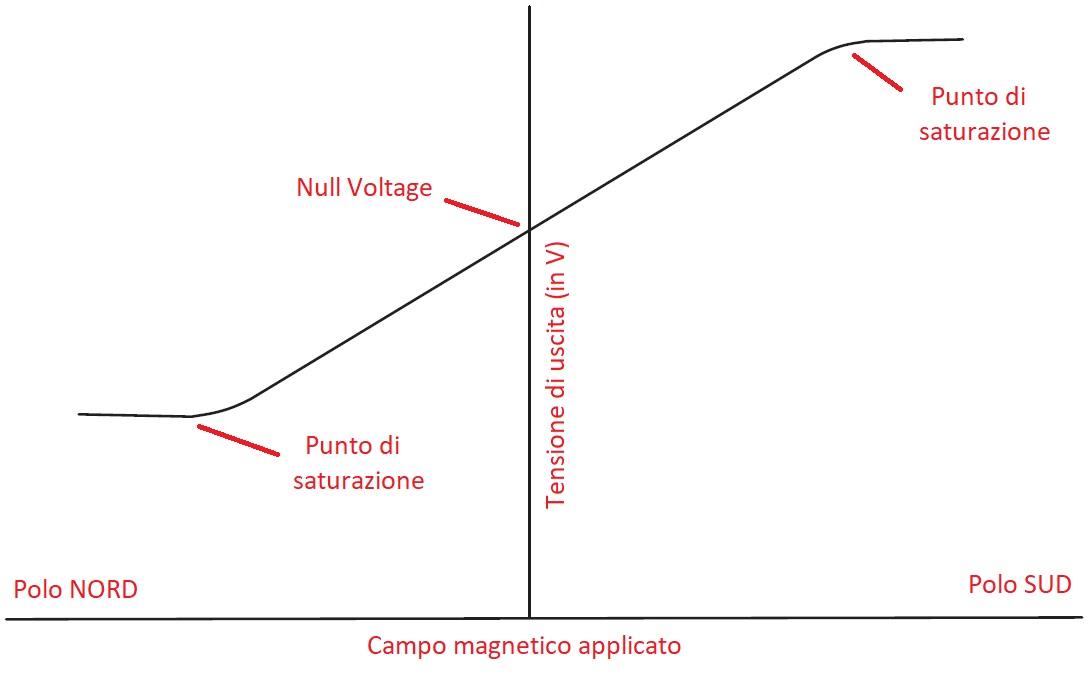
Figura 3: effetto dell’offset sull’uscita del sensore
Si noti, inoltre, come l’uscita dell’amplificatore non possa superare i limiti imposti dalla tensione di alimentazione. In prossimità di tali limiti, l’amplificatore differenziale comincia a saturare, come evidenziato nel diagramma di Figura 3. In questo modo, l’applicazione di campi magnetici di intensità anche molto elevata non potrà provocare danni al sensore, ma lo porterà semplicemente in una zona di saturazione. Per aumentare la flessibilità del sensore analogico, a livello di interfaccia di uscita, l’amplificatore differenziale può essere seguito da uno stadio a transistor con configurazione a emettitore comune, open-collector, oppure push-pull. In Figura 4 possiamo osservare la caratteristica di un sensore a effetto Hall in grado di accettare tensioni di alimentazione comprese tra 5 V e 10 V. Sia la sensibilità del sensore, misurata in mV/Gauss, che il suo offset, misurato in V, sono proporzionali alla tensione di alimentazione.
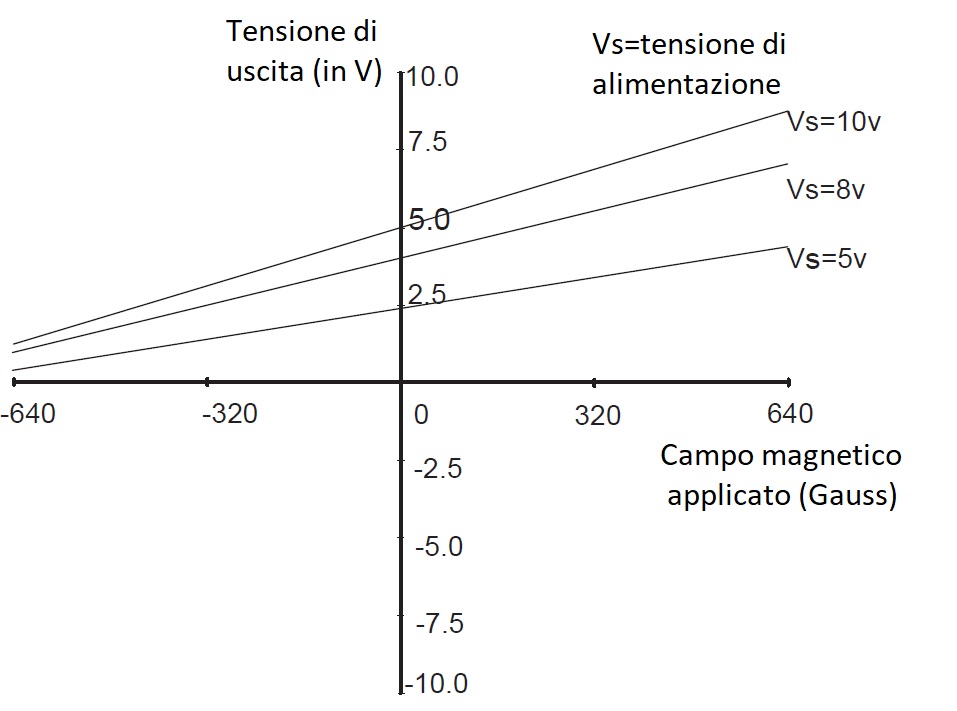
Figura 4: caratteristica lineare di un sensore Hall analogico
La sensibilità del sensore è espressa dalla pendenza (coefficiente angolare) della caratteristica lineare, mentre l’offset è il valore assunto dall’uscita in assenza di campo magnetico esterno. La seconda importante classe di sensori Hall è rappresentata dai sensori magnetici con uscita digitale. In precedenza, abbiamo visto come un sensore magnetico con uscita analogica generi una tensione di uscita linearmente proporzionale al campo magnetico misurato. Il sensore magnetico con uscita digitale, viceversa, ha un’uscita che può assumere soltanto due stati: On e Off. Partendo da un sensore analogico, è comunque possibile ottenere da questo un sensore digitale applicando all’uscita dell’amplificatore differenziale un particolare circuito, detto trigger di Schmitt. Lo schema a blocchi risultante è visibile in Figura 5.
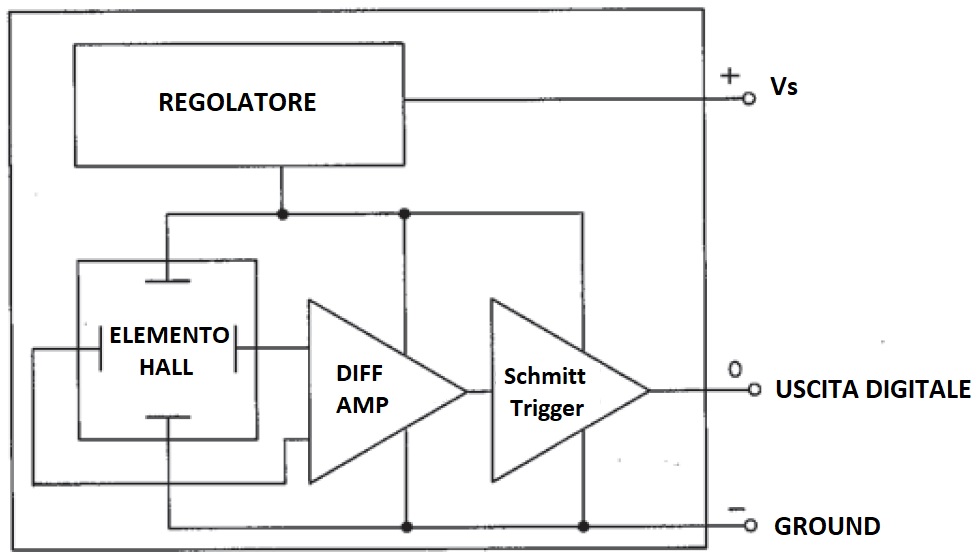
Figura 5: schema a blocchi di un sensore magnetico con uscita digitale
Il trigger di Schmitt agisce in pratica come un comparatore di soglia, confrontando l’uscita dell’amplificatore differenziale con un valore di riferimento. Quando tale valore viene superato, il trigger di Schmitt “scatta”, cioè viene attivato. Viceversa, quando l’uscita dell’amplificatore è inferiore alla soglia, il trigger di Schmitt viene disattivato. Un comportamento di questo tipo è prone a fenomeni di instabilità, determinati da piccole oscillazioni del valore di uscita dell’amplificatore differenziale rispetto al valore di soglia. Si rende pertanto necessaria l’introduzione di un’isteresi, con due distinti valori di soglia che determinano l’attivazione e la disattivazione del trigger di Schmitt. Il meccanismo relativo all’isteresi è visualizzato in Figura 6. Per convenzione, indichiamo con BON l’intensità del campo magnetico al di sopra della quale si ha l’attivazione del trigger di Schmitt e con BOFF l’intensità del campo magnetico al di sotto della quale il trigger di Schmitt si disattiva.
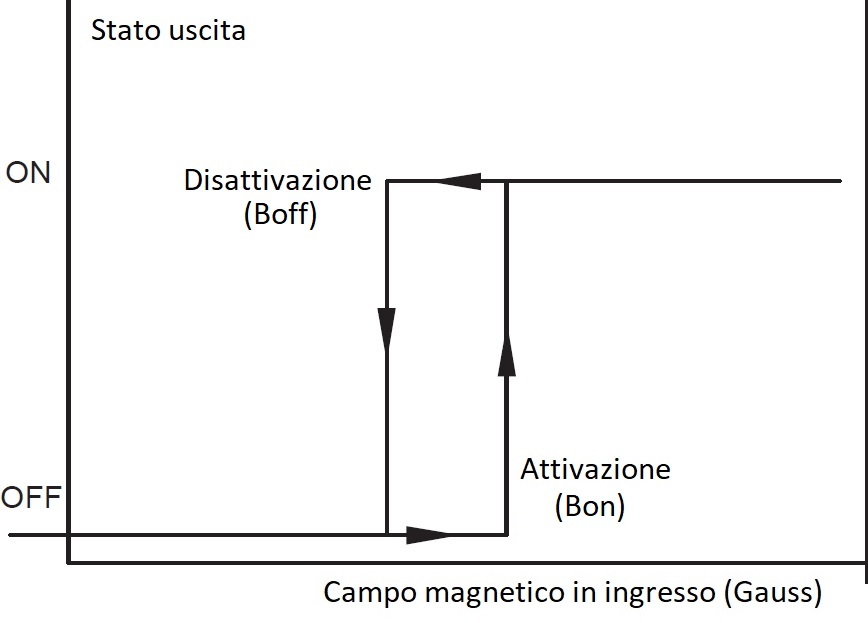
Figura 6: isteresi applicata al trigger di Schmitt
Come nel caso dei sensori magnetici analogici, un transistor (tipicamente un NPN) può essere applicato all’uscita per aumentare la flessibilità di interfacciamento del circuito.
Stadi di uscita
In precedenza, abbiamo visto come l’uscita di un sensore magnetico analogico oppure digitale possa essere configurata in varie modalità, offrendo ai progettisti una maggiore flessibilità nella scelta dell’interfaccia più consona alla specifica applicazione. Vediamo ora in dettaglio come sono realizzati tali stadi di uscita e quali sono i principali vantaggi offerti da ciascuno di essi. Esistono tre principali circuiti di uscita: uscita push-pull, uscita open-drain e uscita open-drain con logica invertente. Il circuito di uscita con configurazione push-pull, realizzato tramite una coppia di transistor, è visibile in Figura 7. Quando la densità del flusso magnetico applicato al sensore risulta superiore a BON, l’uscita del sensore con configurazione push-pull si porta allo stato logico basso (L). Viceversa, quando la densità del flusso magnetico è inferiore a BOFF, l’uscita del sensore si porta allo stato logico alto (H). Questa configurazione presenta la caratteristica di offrire un assorbimento di potenza molto ridotto e il livello di tensione assunto dall’uscita nello stato H risulta molto prossimo alla tensione di alimentazione VCC.
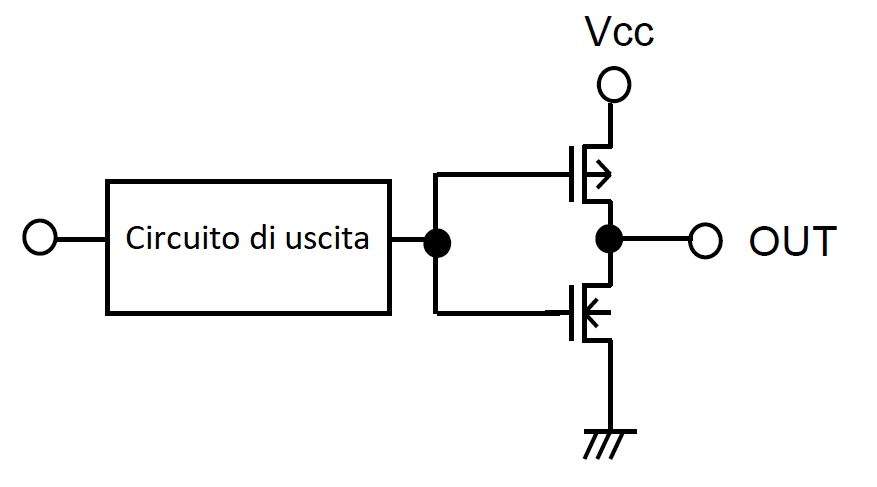
Figura 7: stadio di uscita push-pull
Lo stadio di uscita di tipo open-drain è visibile in Figura 8. La caratteristica di questo stadio è che l’uscita assume il valore logico basso (L) quando la densità del flusso magnetico assume un valore superiore a BON, mentre assume uno stato di alta impedenza (Z) quando la densità del flusso magnetico è inferiore a BOFF. Inoltre, all’uscita può essere applicata una resistenza di pull-up verso VCC (tipicamente pari a 5 V per molti sensori commerciali) in modo tale da evitare un valore di tensione fluttuante quando l’uscita è in alta impedenza.
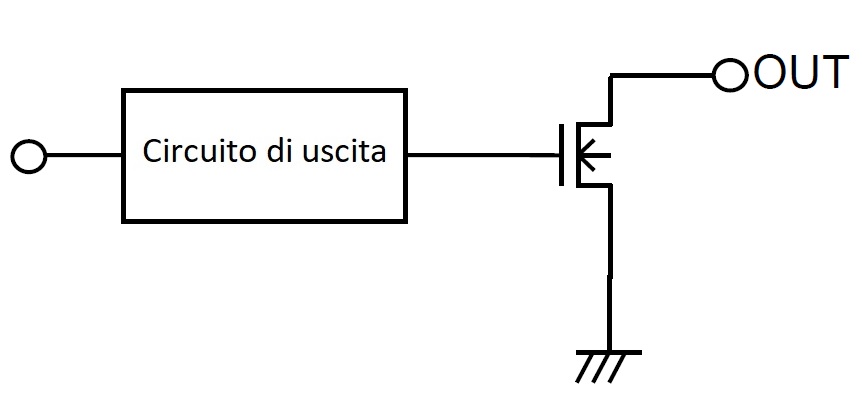
Figura 8: stadio di uscita open-drain
Simile al precedente è lo stadio di uscita open-drain con logica invertente, visibile in Figura 9. Il comportamento è esattamente l’opposto del caso precedente. Quando la densità del flusso magnetico è superiore a BON, l’uscita si porta nello stato di alta impedenza (Z), mentre quando è inferiore a BOFF l’uscita si porta nello stato logico basso (L). Anche in questo caso è possibile applicare un pull-up verso VCC per stabilizzare l’uscita nello stato di alta impedenza. Il vantaggio addizionale rispetto alla soluzione precedente è quello di presentare un assorbimento molto contenuto, soprattutto durante le fasi di inattività del sensore. [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2838 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
PyQt6 la libreria grafica per tutti gli usi

Edge Computing e Intelligenza Artificiale distribuita nelle fabbriche connesse
Digital Signal Processor: la tecnologia digitale applicata all’analisi dei segnali
Il ruolo della simulazione nel design dei PCB: migliorare accuratezza ed efficienza

Ciao Stefano! Complimenti per la spiegazione del sensore a effetto Hall. Io ho una centralina che ha appunto l’uscita con sensore Hall tramite un pedale accelleratore. Il tutto per comandare un motore DC a 12V. E’ possibile in qualche modo limitare l’uscita utilizzando magari il trigger di Schmitt dove sono io però a dire quando e a che soglia si deve attivare?
Vorrei per capirci impostare 2 marce per. la velocità del motore. La prima da 0 a 60%, la seconda da 0 a 100% o meglio a circa 6V la prima e 12V la seconda. Grazie mille in anticipo