In questo progetto, grazie ad una scheda ESP32-CAM e ad un supporto rotante e inclinabile, per mezzo di due servomotori SG90, andremo a realizzare un’applicazione a basso costo per la videosorveglianza. Mediante un web server sarà possibile eseguire lo streaming video in tempo reale e visualizzare sul proprio smartphone ciò che viene inquadrato dalla fotocamera della scheda ESP32-CAM. All'interno del web server saranno presenti quattro pulsanti che comanderanno i servomotori in modo da far ruotare e inclinare la fotocamera e quindi modificare la scena inquadrata.
Introduzione
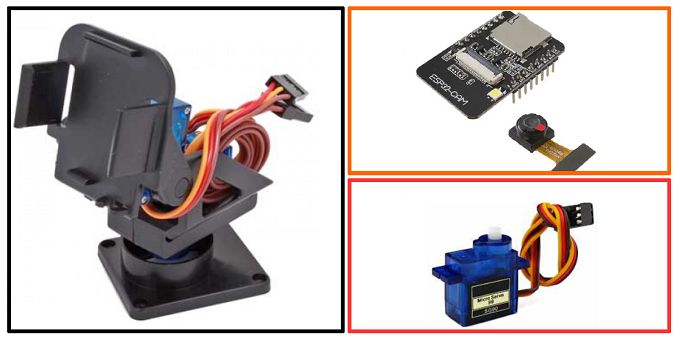
Per questo progetto, è necessaria una scheda di sviluppo ESP32-CAM con accesso a due GPIO per controllare i due servomotori. Nel caso specifico abbiamo utilizzato i seguenti componenti:
- ESP32-CAM AI-Thinker
- Adattatore USB Seriale FTDI (opzionale ma consigliato)
- Staffa girevole e inclinabile
- 2 servomotori SG90
- Basetta sperimentale (opzionale)
- Cavi di collegamento
- IDE Arduino
Cos'è un servomeccanismo?
Un servomeccanismo è un meccanismo alimentato che produce movimento o forza ad un livello di energia superiore al livello di ingresso e viene impiegata la retroazione per rendere automatico il controllo. Un servomeccanismo consiste principalmente di tre componenti di base:
- Un dispositivo controllato
- Un sensore di uscita
- Un sistema di feedback
Un servomeccanismo è un sistema di controllo automatico a circuito chiuso, invece di controllare un dispositivo applicando un segnale di ingresso variabile, il dispositivo è controllato da un segnale di feedback generato confrontando il segnale di uscita e il segnale di ingresso. In Figura 1, nell'immagine in alto, viene riportato lo schema a blocchi di un generico servomeccanismo.
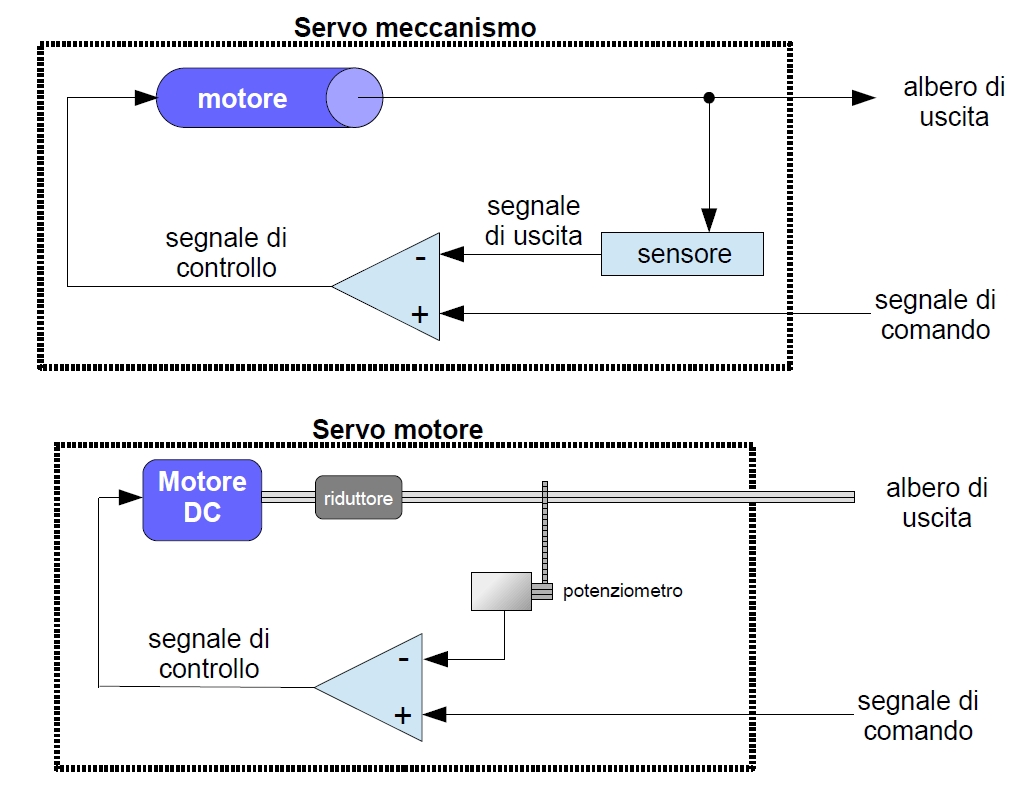
Figura 1: Schema a blocchi di un generico servomeccanismo (in alto) e di un generico servomotore (in basso)
Quando il segnale di ingresso (segnale di comando) viene applicato al sistema, esso viene confrontato con il segnale di uscita prodotto dal sensore di uscita. Il segnale di uscita del comparatore (segnale di controllo) funge da segnale di ingresso del dispositivo controllato. Il segnale di controllo sarà diverso da zero finché esisterà una differenza logica tra il segnale di comando e il segnale di uscita. Dopo che il dispositivo ha raggiunto l'uscita desiderata, non ci sarà più alcuna differenza logica tra il segnale di comando e il segnale di uscita. Quindi, il segnale di controllo, non sarà sufficiente per azionare ulteriormente il dispositivo e per produrre ulteriore segnale di uscita, almeno fino a quando il successivo segnale di comando non sarà applicato al sistema.
Il compito principale di un servomeccanismo è mantenere l'uscita di un sistema al valore desiderato in presenza di disturbi.
Servomotore
Un servomotore è un motore combinato con un dispositivo di rilevamento della posizione. I servomotori sono estremamente utili nella robotica. I motori sono piccoli e sono estremamente potenti per le loro dimensioni. In Figura 1, nell'immagine bassa, viene raffigurato lo schema a blocchi di un generico servomotore. L'albero del motore DC è accoppiato, grazie ad un riduttore, ad un altro albero chiamato albero di uscita. Il riduttore viene utilizzato per ridurre l'alto numero di giri sull'albero del motore DC ad un basso numero di giri sull'albero di uscita. La manopola di regolazione della tensione di un potenziometro è disposta con l'albero di uscita in modo tale che durante la rotazione dell'albero, anche la manopola ruoti e crei un potenziale elettrico variabile secondo il principio del potenziometro. Il potenziale elettrico aumenta con il movimento angolare della manopola del potenziometro insieme all'albero del sistema. Questo potenziale elettrico o tensione viene portato all'amplificatore di feedback del rilevatore di errore insieme al segnale di riferimento di ingresso, ovvero la tensione del segnale di ingresso. All'aumentare dell'angolo di rotazione dell'albero, la tensione del potenziometro aumenta fino a raggiungere un valore pari alla tensione di comando in ingresso al sistema. Poiché in questa posizione dell'albero non c'è differenza tra la tensione del segnale proveniente dal potenziometro e la tensione di ingresso (segnale di comando) al sistema, la tensione di uscita dell'amplificatore (segnale di controllo) diviene zero. Il motore si troverà in questa posizione di riposo fino a quando non verrà dato un altro comando al sistema per l'ulteriore movimento dell'albero nella direzione desiderata. Quindi, possiamo concludere che l'albero del servo è collegato ad un potenziometro. Il circuito all'interno del servo, a cui è collegato il potenziometro, conosce la posizione del servo. La posizione attuale verrà confrontata continuamente con la posizione desiderata con l'aiuto di un amplificatore di rilevamento degli errori. Se viene rilevata una mancata corrispondenza, viene fornito un segnale di errore all'uscita dell'amplificatore di errore e l'albero ruoterà per raggiungere la posizione esatta richiesta. Una volta raggiunta la posizione desiderata, si ferma e attende.
SG90 Micro Servo
Un tipico servomotore, utilizzato in hobbistica, viene controllato inviando una serie di impulsi attraverso la linea del segnale. La frequenza del segnale di controllo dovrebbe essere 50 Hz o dovrebbe verificarsi un impulso ogni 20 ms. La larghezza dell'impulso determina la posizione angolare del servo e questi tipo di servo possono solitamente ruotare di 180 gradi. Uno dei modelli di servo più popolari tra i makers è il Micro Servo SG90. In Tabella 1 vengono riportati i principali parametri tecnici del servomotore SG90.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2139 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.



Buongiorno, non e’ la prima volta che vedo pubblicati progetti presi direttamente dal sito RNT ( Randon Nerd Tutorial ndr) che io seguo regolarmente. La prossima volta invece che abbonarmi alla vostra rivista opto per RND . Pubblicare qualcosa di originale ?
Salve, il fatto che l’articolo sia ispirato a quello di RND non è un mistero, c’è scritto anche nei riferimenti. Il valore aggiunto apportato dall’articolo sta nelle descrizioni dei servo e mini servo, e nelle istruzioni di assemblaggio della staffa. Cerchiamo sempre di aggiungere qualcosa di nostro agli articoli da cui prendiamo spunto.
Detto questo, la ringraziamo per la sua osservazione, promettendole di portare maggiore originalità e qualità in futuro.