Il robot di telepresenza è fondamentalmente un robot operativo a distanza dotato di telecamera e sensori. Il robot di telepresenza è utilizzato in molte istituzioni nel mondo: accademiche/di ricerca, militari e spaziali per esplorare località remote o aree in cui è troppo pericoloso per l'essere umano essere presente fisicamente. Pertanto, nel passato, per un appassionato di elettronica, costruire questo tipo di robot era solo un sogno, sia per la complessità di progettazione che realizzativa e per il notevole costo, ma, oggigiorno, poiché sul mercato sono disponibili moduli elettronici wireless sempre più economici e sofisticati, potremmo prendere parte all'eccitante possibilità di controllare a distanza un robot di telepresenza dal nostro dispositivo di “controllo missione”. In questo articolo proporremo il progetto/tutorial di un robot di telepresenza telecomandato via Wi-Fi utilizzando il modulo ESP32-CAM e un server web con il quale sarà mostrato sul display di uno smartphone, tablet o PC, lo streaming video di ciò che il robot "vede" durante il suo itinerario. Il robot potrà essere controllato da remoto anche se non si è presenti nella zona operativa del robot. In questo progetto sarà utilizzato l’IDE di Arduino per programmare l'ESP32-CAM e, mediante il monitor seriale, come strumento per visualizzare i risultati di vari test e misure.
Introduzione
In sostanza, un robot di telepresenza consente di posizionare in ogni istante una persona in un luogo remoto creando una presenza virtuale o "telepresenza". Un robot di telepresenza è un robot dotato di sensori e una videocamera, controllato da computer, tablet o smartphone, in modo che le persone che interagiscono con il robot possano vedere e “sentire” ciò che rilevano la videocamera e i sensori del robot nell’area di esplorazione. Alcuni robot richiedono che un tablet o un telefono sia collegato al robot, mentre altri includono funzionalità video e audio integrate. Persone provenienti da tutti i tipi di ambienti stanno mettendo in azione i robot di telepresenza. Scuole, uffici aziendali, ospedali, cliniche mediche, magazzini aziendali e altro ancora, stanno cercando potenziali vantaggi che possono essere ottenuti sfruttando prudentemente i progressi nel campo della robotica di telepresenza. Di conseguenza, gli stessi robot di telepresenza stanno diventando sempre più popolari man mano che il loro potenziale continua ad essere esplorato, sviluppato e utilizzato. I proprietari di robot stanno apprezzando il risparmio sui costi, il risparmio di tempo ed energia, la comunicazione e la presenza migliorate che i robot di telepresenza possono portare in quasi tutte le aree o luoghi.
Quindi, l’argomento della telepresenza robotica sembra interessante. Ma quali sono i vantaggi? A cosa serve un robot di telepresenza per un comune utente o per un imprenditore? Una risposta è che, come su accennato, un robot di telepresenza può essere utilizzato per fornire “vista e udito” mobili di vasta portata, consentendo una presenza remota in qualsiasi luogo mediante una connessione Internet. Ad esempio, dalla propria abitazione a Roma, un robot di telepresenza permetterebbe di vedere se tutto è in ordine nella vostra casa di vacanza a Parigi con la comodità in più di poter controllare esattamente ciò che si desidera visualizzare, semplicemente premendo uno o due pulsanti dal proprio dispositivo Wi-Fi. In generale, l'utente ha il controllo completo per spostare il robot in ogni direzione e visualizzare qualsiasi cosa nella posizione del robot. Gli ospedali utilizzano le funzionalità di telemedicina da anni e ora i robot di telepresenza forniscono una tecnologia ancora più solida per coadiuvare i chirurghi nel consigliare in modo più efficace i loro colleghi durante un'operazione, i medici a svolgere più comodamente i loro giri di visite o monitorare i pazienti che sono stati recentemente dimessi dall'ospedale ed eliminare i tempi di viaggio in situazioni di emergenza come l'evento di un ictus, quando ogni minuto risparmiato comporta il salvataggio di milioni di cellule cerebrali. Nel campo medico questi robot sono comunemente indicati più specificamente come "robot di telepresenza medica" o "robot di telepresenza ospedaliera", molti dei quali hanno applicazioni relative alla salute aggiunte alle capacità di telepresenza di base.
I robot di telepresenza vanno oltre una semplice videoconferenza perché l'operatore ha il pieno controllo di ciò che desidera vedere: non è più necessario che più persone si alzino dal proprio posto per essere viste nello schermo video. Non è più necessario attendere che un dipendente tenga una conferenza remota, si può “andare” da lui quando si desidera. Non c'è più bisogno di volare o guidare per vedere un magazzino o visitare un paziente in caso di emergenza; si accede semplicemente al robot ed essere lì in un batter d'occhio per valutare la situazione. Si usa semplicemente il computer, tablet o smartphone per dirigere la telecamera del robot per vedere cosa o chi si desidera vedere. Questo controllo è ulteriormente potenziato dalla capacità di guidare i robot in stanze e corridoi, offrendo una presenza virtuale più completa. Inoltre, alcuni robot sono in grado di utilizzare funzionalità aggiuntive come un puntatore laser che può aiutare ad aumentare l'efficacia della comunicazione e funzionalità di navigazione automatica e mappatura che consentono di fare clic su una posizione e rilassarsi mentre il robot vi si sposta autonomamente fornendo un'indicazione al suo arrivo. In Figura 1 un esempio di robot di telepresenza.

Figura 1: Un esempio di robot di telepresenza
Il progetto
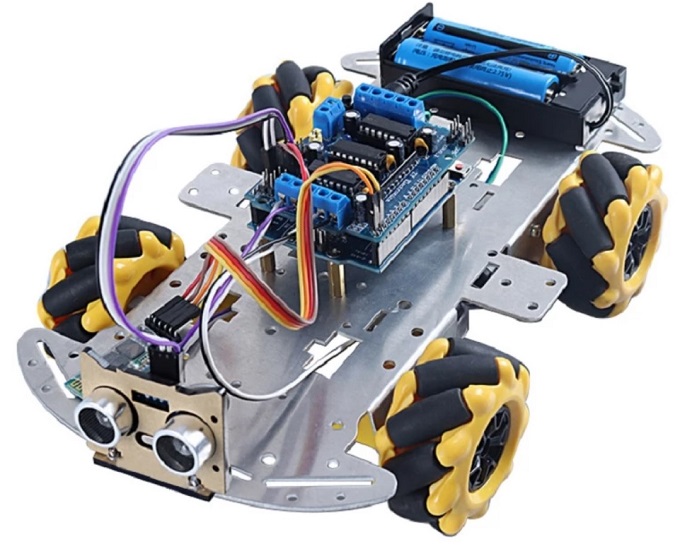
Il robot di telepresenza del nostro progetto è composto dallo chassis del robot, dalla scheda di controllo e ripresa video e da un server web. Lo chassis è costituito da una piattaforma superiore di supporto dell’elettronica e da una piattaforma sottostante di supporto dei motori e delle ruote. Come potete vedere in Figura 2, in questo progetto abbiamo pensato di utilizzare un kit di uno chassis di una cosiddetta “Smart car” con quattro ruote di cui ne utilizzeremo solo due tenendo sollevata la parte posteriore dello chassis con un ruotino; comunque potete anche utilizzare uno chassis più semplice con solo due ruote, noi abbiamo preferito prevedere quello con quattro ruote perché può essere utilizzato in futuro anche in altri progetti di robot magari più complessi con quattro ruote, come abbiamo pensato di fare anche in un nostro precedente progetto a puntate “PRAM, il tuo Primo Robot Autonomo Mobile” che potete leggere sul blog di Elettronica Open Source e sulla rivista Firmware 2.0. Se avete realizzato questo robot e volete utilizzarne lo chassis (come abbiamo fatto noi), basterà scollegare i jumpers collegati alle due morsettiere della breadboard, allo switch e al pacco batterie.
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 1604 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Gioielli intelligenti: conosciamo l’orecchino termico
Progettiamo con Arduino IoT Cloud
Sniffing su RS232: come si spiano le connessioni seriali

Utilizzo dei droni per l’agricoltura di precisione
Pianificazione ottima per un robot E-Puck con feedback visivo