Nel mondo della robotica aerea fai-da-te, ci sono anche soluzioni innovative che cambiano l’approccio alla progettazione dei droni. L’utilizzo della scheda Arduino Nicla Vision come unità di controllo del volo crea nuove prospettive per i costruttori indipendenti, grazie alla sua versatilità, compattezza e potenza computazionale. Un recente progetto dimostra come, con l’integrazione intelligente di sensori e algoritmi personalizzati, sia possibile avvicinarsi a risultati solitamente riservati a sistemi altamente specializzati.
Nel contesto dell’elettronica embedded applicata all’aeronautica civile, la sperimentazione di nuove piattaforme per il controllo del volo è un’area in continua evoluzione. Uno dei casi più interessanti è l’impiego della scheda Arduino Nicla Vision come cervello operativo di un drone costruito interamente su misura. Il progetto, realizzato da Milos Rasic e presentato sulla community element14, ha dimostrato il potenziale di un dispositivo nato per applicazioni di visione artificiale in un contesto completamente differente.
Il controller di volo svolge una funzione chiave all’interno di un sistema UAV (Unmanned Aerial Vehicle). Esso non si limita alla ricezione dei comandi, ma gestisce attivamente l’equilibrio dinamico, adattandosi in tempo reale a variazioni ambientali, come raffiche di vento o micro-turbolenze. La stabilità aerodinamica dipende in gran parte dalla qualità dei dati di movimento e dalla reattività del sistema di elaborazione. Da questo punto di vista, la Nicla Vision si rivela una soluzione efficace grazie alla combinazione tra sensore inerziale a sei assi e microcontrollore STM32H7 ad alte prestazioni. Oltre alla dotazione di base, la scheda integra una fotocamera utile per l'elaborazione delle immagini, oltre a moduli wireless che facilitano la comunicazione con sistemi esterni tramite Wi-Fi o Bluetooth. Il suo design estremamente compatto e leggero, con dimensioni di appena 22,86 millimetri per lato, ne favorisce l’integrazione su piccoli velivoli, senza penalizzare la capacità di calcolo.
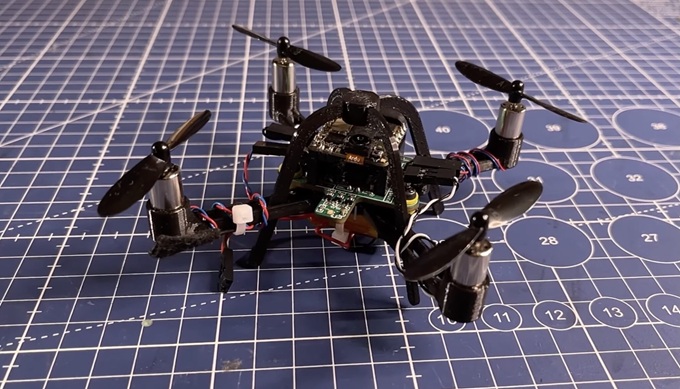
Nel caso specifico, Rasic ha ideato l’intero drone partendo da zero, utilizzando motori a corrente continua del tipo 8520 e un telaio ottenuto tramite stampa 3D. Il vero punto di forza, però, non risiede nell’hardware meccanico, bensì nella scelta della piattaforma di controllo. Per adattare la Nicla Vision al ruolo di flight controller, è stato progettato un circuito stampato personalizzato che funge da interfaccia e ospita componenti ausiliari per la gestione della potenza e della distribuzione energetica. L’aspetto più impegnativo ha riguardato la scrittura del firmware. Anziché affidarsi a soluzioni precompilate, Rasic ha optato per lo sviluppo di un software ex novo. Tale decisione ha comportato la realizzazione di tre distinti algoritmi PID (proporzionale-integrale-derivativo), ognuno dedicato a controllare uno degli assi di movimento del drone: beccheggio, rollio e imbardata. Gli input di volo vengono inviati via Wi-Fi da un computer, utilizzando un’interfaccia con chiavetta USB simile a quella di un simulatore.
Attualmente, il prototipo necessita di ulteriori perfezionamenti, soprattutto nella taratura dei parametri PID, una sfida comune anche per i progettisti più esperti. Nonostante gli aspetti interessanti, le fondamenta tecniche gettate con questo approccio dimostrano come una scheda pensata per la visione artificiale possa diventare il nucleo di un sistema di volo autonomo. Attraverso una combinazione di creatività, conoscenze elettroniche e capacità di programmazione, è stato così possibile ridefinire il ruolo di un modulo embedded, aprendo scenari interessanti per chi desidera sperimentare nuove forme di automazione nei droni autoprodotti.
Ecco un video esplicativo:
Riferimenti
Progettazione di un micro drone controllato da PID Arduino -- Episodio 668 - element14 Community

