Microchip presenta i fondamenti dei motori DC
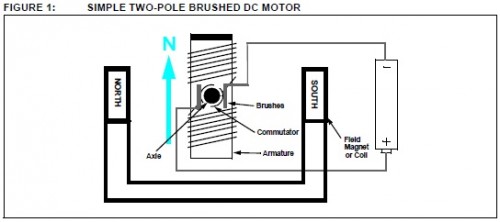
In questa application note [PDF] molto interessante Microchip spiega il funzionamento ed i componenti interni dei motori DC a spazzole.
Si concentra inoltre su come rendere un PIC qualsiasi un ottimo driver con la possibilità di variare velocità e direzione di rotazione.
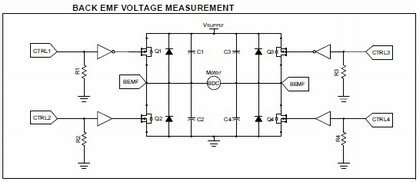
Microchip ci mette a disposizione, per esempio, uno schema base per un ponte H bidirezionale
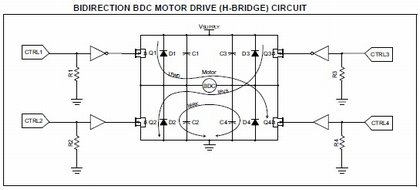
e conseguente tabella delle modalità di funzionamento del ponte stesso al variare dello stato dei quattro MOSFET utilizzati.
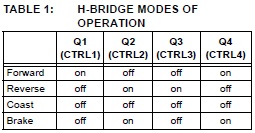
I MOSFET sono poi polarizzati da quattro porte di un microcontrollore PIC.
Analizza poi ben tre diversi modi di misurare la velocità di rotazione dei motori DC:
1) Encoder ottico: formato da un led IR, un fototransistor ed una ruota a finestre
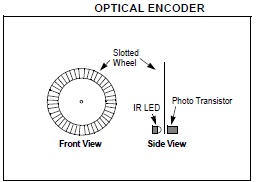
Il fototransistor riceve l'informazione del led solo quando l'IR, trovando una finestra, attraversa la ruota.
2) Sensore ad effetto Hall: formato da un sensore ad effetto Hall e vari magneti posti sulla ruota
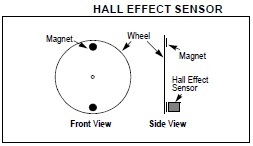
Il sensore riceve la variazione del campo magnetico solo quando la ruota, girando, avvicina e/o allontana i magneti.
3) Back Electro Magnetic Flux (BEMF)

Esatto.
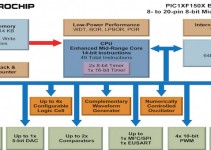
La serie PIC18F2331/2431/4331/4431 è perfetto per queste applicazioni.
Inoltre ha 6 o 8 PWM con i quali è possibile realizzare un inverter per motori trifase.
Dispone di tre ingressi per l’encoder (QEA,QEB,INDX) per cui è possibile controllare la velocità e anche il senso di rotazione sempre che l’encoder ottico abbia la serie delle tre finestrelle.