
L'articolo evidenzia l'importanza del processo di taratura, fondamentale affinché più misure di uno stesso oggetto siano confrontabili tra loro. Tale importanza passa attraverso l'automatizzazione del processo di taratura di un motore a corrente continua. L'obiettivo è realizzare un tachimetro digitale per misurare la velocità di rotazione di un motore, utilizzando lo stesso come dinamo tachimetrica, collegato attraverso un giunto metallico ad un secondo motore controllato utilizzando un full bridge, e la tecnica PWM. Allo scopo vengono descritti i componenti utilizzati, le fasi di lavoro, e i due pannelli frontali sviluppati utilizzando il software LabVIEW. Il primo consente di interfacciarsi alla struttura di controllo, settare i parametri, monitorare la tensione ai capi del motore, ed accedere ai diagrammi di taratura; il secondo permette ad un qualsiasi utente di variare il valore del duty cycle e conoscere la velocità di rotazione corrispondente del motore.
Descrizione della struttura
In Figura 1.0.1 è mostrato lo schema a blocchi rappresentativo della struttura in esame dal quale si evince: l’alimentatore stabilizzato, il segnale di PWM, il circuito di controllo, il blocco motore, e l'encoder.
Il circuito di controllo (Figura 1.0.2) è alimentato mediante il generatore di tensione, Agilent E3631A, settato ad una tensione di 11 V e limitato in corrente ad 1 A.
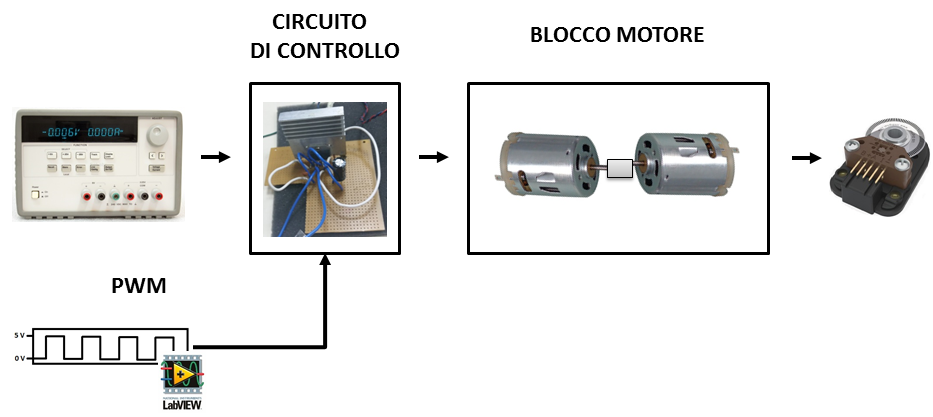
Figura 1.0.1: Schema a blocchi della struttura
L’elemento fondamentale di tale circuito è il convertitore DC/DC Full Bridge LMD 18200, il quale, come si deduce dallo schema circuitale (Figura 1.0.2), riceve in ingresso sul pin 5 il segnale di PWM, uscita digitale della DAQ NI PCI − 6036E (Figura 1.0.5), generato appositamente in LabVIEW. I pin 6 e 7 sono collegati rispettivamente all’alimentazione, fornita dal generatore, ed alla massa. Mentre, al fine di ridurre il ripple sull’alimentazione fornita in ingresso al full bridge, si è utilizzato un apposito condensatore elettrolitico del valore di 220 μF. Infine, i pin 1 e 11 destinati al bootstrap sono connessi mediante due condensatori ceramici di 10 nF ai pin 2 e 10, collegati a loro volta ai capi del motore.
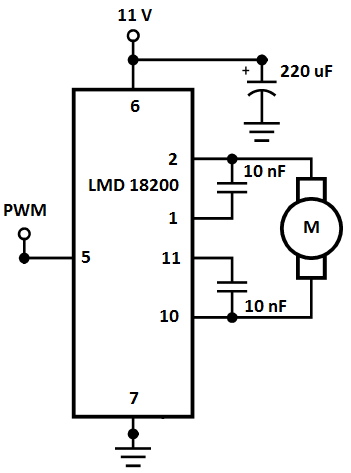
Figura 1.0.2: Convertitore DC/DC Full Bridge, LMD18200
La parte principale dello schema è rappresentato dal “blocco motore” (Figura 1.0.1), costituito da un primo motore comandato attraverso il circuito di controllo e collegato mediante un giunto metallico ad un secondo motore (Figura 1.0.3), che funge da dinamo tachimetrica.
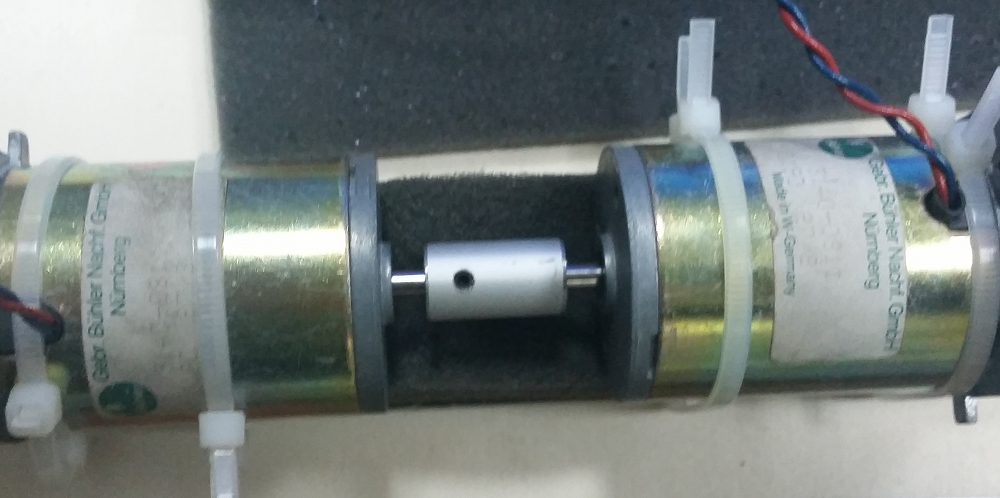
Figura 1.0.3: Blocco motore: Gebr Bühler Nachf. Motor
Osservata la tensione d’uscita ai capi del secondo motore, si vuole misurare la sua velocità di rotazione in giri/minuto (rpm, rounds per minute). A tal fine, si dispone di un encoder ottico incrementale Hp HEDS 9500 (Figura 1.0.4), ossia, un trasduttore analogico - digitale che, sulla base della rotazione dell’asse del motore, fornisce in uscita due segnali elettrici in quadratura sottoforma di treni d’impulsi rettangolari.
I due segnali sono disponibili in uscita ai pin channel A e channel B (Figura 1.0.4). Il channel B è la sorgente del contatore ed è connesso al pin DEV 1CTR1SRC del blocco connettore NI CB − 68LP, a sua volta collegato tramite l’adattore PCI 1200 alla DAQ; invece, il channel A fornisce la direzione del conteggio ed è collegato al pin P.07. Inoltre, ai pin 8 e 35, sempre della morsettiera, sono collegati i due ingressi dell’encoder relativi all’alimentazione (VCC) ed alla massa (GND). Infine, il terminale N.C. (not connected) dell’encoder è collegato al rispettivo pin N.C. del blocco connettore.
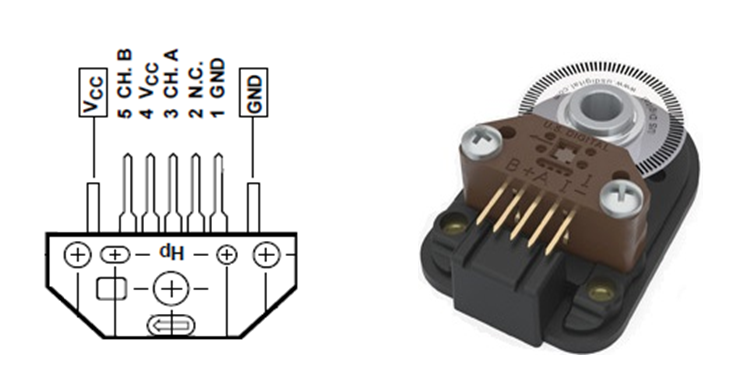
Figura 1.0.4: HP HEDS 9500, package pinouts
Il funzionamento di tutta la struttura è possibile grazie alla scheda DAQ di acquisizione dati, NI PCI − 6036E (Figura 1.0.5) che funge da interfaccia tra il computer e i segnali del mondo esterno. Essa include sedici ingressi analogici a 16 bit e due uscite analogiche a 16 bit, presenta poi otto linee I/O digitali e due counter/timer a 24 bit, a 20MHz.

Figura 1.0.5: NI PCI - 6036E
In Figura 1.0.6 è mostrata la struttura nel suo insieme.

Figura 1.0.6: Struttura completa
Taratura automatica in LabVIEW
L’obiettivo di questo progetto, ripercorrendo quanto già detto all'interno del paragrafo introduttivo, è quello di realizzare un tachimetro [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 3155 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Progetto di un sistema di sicurezza IoT con il sensore PIR HC-SR501 – Parte 1

Ricevitore radio SDR con il Raspberry Pi Pico – Parte 2
Progetto di un sistema di sicurezza IoT con il sensore PIR HC-SR501 – Parte 2
Non sono mai stato un amante di Labview, ma in questi casi si può dire che sia fondamentale per accelerare lo sviluppo di processi di taratura, come del motore in corrente continua, oggetto dell’articolo.
Le applicazioni con Labvew sono tante supportate anche dall’hardware che la NI mette a disposizione. Per non parlare della programmazione ad oggetti molto intuitiva. Matlab della Mathworks si avvicina molto con i suoi toolbox, anche se è più indirizzato verso l’analisi dati.
Complimenti per l’articolo, molto interessante.
Una richiesta, volendo verificare sperimentalmente questa tua prova, potresti indicare dove recuperare il blocco motore utilizzato o qualcosa di simile. Grazie
Ciao Vito! Per la realizzazione della stazione automatica di taratura sono stati utilizzati una vecchia coppia di motori prelevati da una dismessa stampante ad aghi. Non avendo più i motori per le mani, non posso fornirti alcun dettaglio in merito al seriale, produttore, o informazioni similari.
Per qualunque tua altra curiosità, non esitare a chiedere.