
Eccoci arrivati alla seconda parte del tutorial relativo alla costruzione di un mini quadricottero. Nella prima parte abbiamo visto i criteri e i consigli da utilizzare per selezionare i componenti adatti, spiegando la funzione svolta da ognuno di essi (telaio, motori, eliche, elettronica). Non ci rimane che proseguire, passando (finalmente!) dalla teoria alla pratica.
Introduzione
In questa parte del tutorial ci occuperemo dell’assemblaggio del quadricottero, operazione che verrà suddivisa in otto step. Verranno poi esaminati gli aspetti legati alla manutenzione e alla riparazione del velivolo, oltre a qualche considerazione in materia di sicurezza e normative. Chiuderemo il tutorial con un capitolo in cui verranno spiegate le tecniche più adatte per far volare con successo, e in piena sicurezza, il quadricottero autocostruito.
Step 1 - assemblaggio del telaio
La maggior parte dei produttori fornisce un manuale istruzioni, solitamente disponibile in formato elettronico sul rispettivo sito. E’, quindi, sufficiente attenersi a tale guida, assicurandosi che le viti necessarie per fissare il flight controller siano posizionate correttamente. Successivamente si può procedere con il flight controller, le cui saldature possono essere eseguite prima, oppure dopo il suo montaggio sul telaio. La seconda opzione è preferibile, in quanto il componente da saldare si troverà già in posizione. In Figura 1 possiamo osservare due fasi relative all’assemblaggio del telaio.
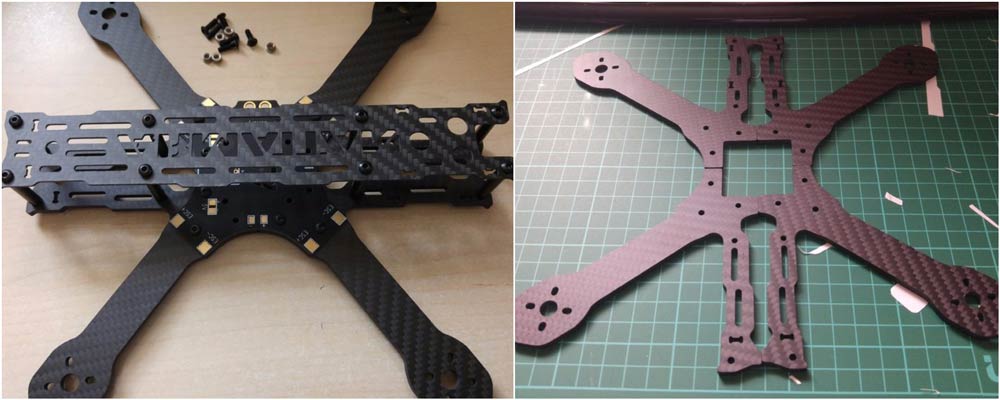
Figura 1: assemblaggio del telaio
Collegamento del regolatore di tensione (opzionale)
Il regolatore di tensione (opzionale), è necessario solo se si utilizza un ESC privo di BEC (acronimo di Battery Eliminator Circuit, un dispositivo la cui funzione è quella di ridurre la tensione proveniente dalla batteria LiPo in modo tale da adattarla al valore richiesto dall’elettronica). Il telaio utilizzato per il prototipo era dotato di una Power Distribution Board (PDB) integrata, con dei fori su cui era possibile saldare il regolatore di tensione. Qualora il telaio utilizzato fosse privo di tali fori, è possibile collegare VIN e GND a uno dei pad spare presenti sulla Power Distribution Board (si veda la Figura 2).
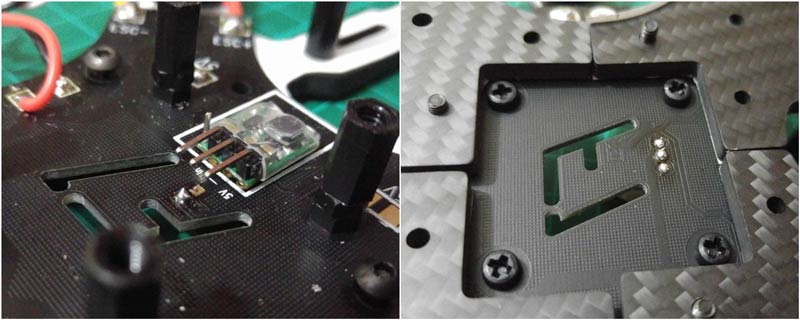
Figura 2: collegamento del regolatore di tensione
Un regolatore di tensione molto comune è il Pololu 5V, un regolatore step down (o bucket) dotato di 4 pin (ne utilizzeremo soltanto 3, il quarto andrà tagliato). I 3 pin VOUT, GND e VIN vanno saldati sul pin header, e il pin SHDN va ponticellato con il pin VIN, in modo tale che la corrente di uscita sia di 600 mA (senza il ponticello, la corrente di uscita sarebbe di soli 20 mA, non sufficienti per alimentare l’elettronica di bordo). Successivamente, collegare VIN e GND a un qualunque pad positivo o negativo del PDB. VOUT e GND vanno invece collegati ai due corrispondenti pin di alimentazione del flight controller.
Ora dobbiamo realizzare un connettore XT60. L’operazione è molto semplice: è, infatti, sufficiente saldare un filo rosso di opportuno diametro al terminale positivo, e un filo nero dello stesso diametro al terminale negativo (Figura 3); successivamente, occorre avvolgere ogni estremità dei fili con dei tubetti termorestringenti.

Figura 3: il connettore XT60
Step 2 - flight controller
Test
Prima di eseguire saldature sul flight controller, è bene testarlo, collegandolo a una porta USB del computer tramite un cavo micro USB. Se il dispositivo si connette, e tutti i suoi led si accendono correttamente (Figura 4), il test si può ritenere superato.

Figura 4: test del flight controller
Programmazione
Conviene sempre accertarsi che il flight controller sia equipaggiato con la corretta versione di firmware. Per fare ciò, occorre collegare la board al computer, cortocircuitare i terminali di boot e lanciare CleanFlight. Selezionare il tab "Firmware Flasher" posto sulla sinistra, abilitare "No reboot sequence" e selezionare il firmware corretto dal menu a tendina. Una volta caricato il file, cliccare su "Flash Firmware". Terminata la programmazione, scollegare la board e rimuovere lo stagno dai terminali di boot.
Saldatura
Il Naze32 è dotato di una serie di pin che vanno saldati sui fori corrispondenti, come indicato in Figura 5.
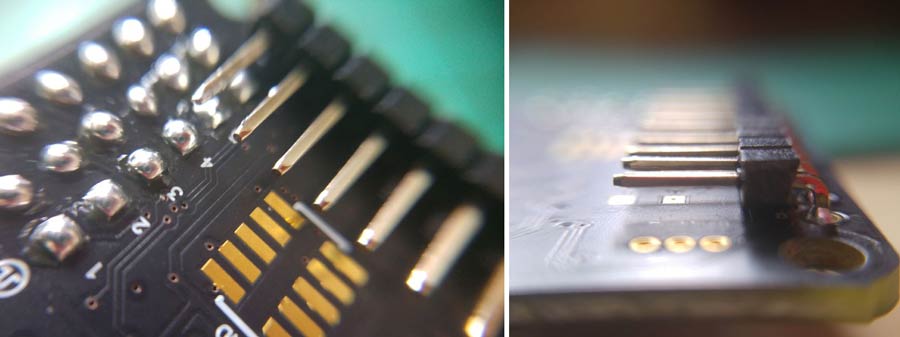
Figura 5: saldatura dei pin header sul flight controller
Step 3 - motori
Montaggio
Per determinare la lunghezza dei fili collegati ai motori, non ci resta altra soluzione che posizionare uno di essi sul telaio, ripetere la stessa operazione con un ESC e misurare la lunghezza dei fili (Figura 6). Sarà poi possibile tagliare i fili per gli altri tre motori utilizzando la lunghezza campione appena ottenuta.

Figura 6: come determinare la corretta lunghezza dei cavi motore
Ogni motore è dotato di quattro fori di fissaggio, per il momento è comunque sufficiente fissare due sole viti in posizione diametralmente opposta.
Misura e taglio dei cavi
Una volta determinata la lunghezza corretta dei cavi (Figura 7), si può procedere con il loro taglio, assicurandosi che la misura sia sufficiente per raggiungere i terminali di saldatura. Le stesse operazioni andranno ripetute per gli altri tre motori.
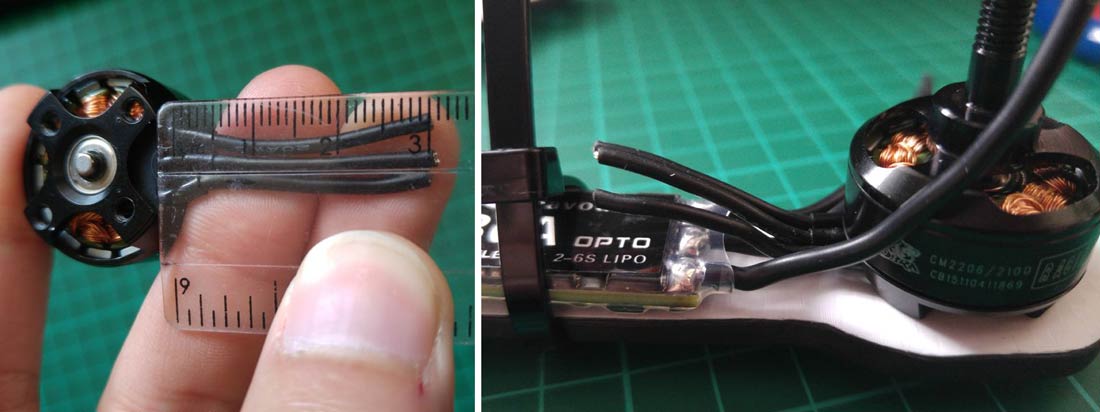
Figura 7: misura e taglio dei cavi motore
Step 4 - test del verso di rotazione
In un quadricottero occorrono due motori con verso di rotazione orario e due motori con verso di rotazione antiorario. Il test relativo al corretto verso di rotazione dei motori può essere eseguito utilizzando un servo tester oppure tramite CleanFlight. Vediamo come eseguire il test con un servo tester. Ci serviranno anzitutto delle pinzette a coccodrillo per collegare tra loro i fili che provengono dall’ESC con il motore (Figura 8). Utilizzeremo poi sempre dei coccodrilli per collegare la batteria all’ESC tramite i cavi XT60 preparati in precedenza.
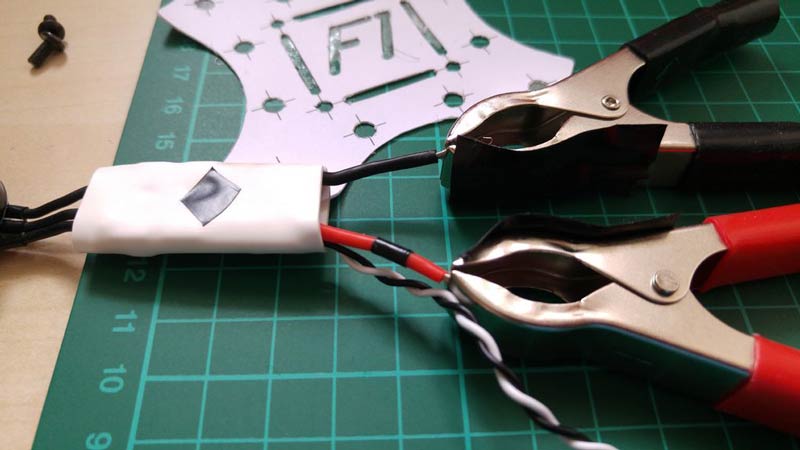
Figura 8: collegamento dei coccodrilli all’ESC
Collegare il pin segnale dell’ESC ai pin "OUT" del servo tester e l’alimentazione al servo tester tramite i pin "IN" utilizzando un contenitore per batterie AA. Collegare poi la batteria e ruotare lentamente il potenziometro sino a quando il motore inizia a girare. Osservare il verso con cui gira e prenderne nota (Figura 9). Ripetere la stessa operazione per tutti i motori e tutti gli ESC, assicurandosi di tenere sempre traccia di ogni misura eseguita. Per invertire il verso di rotazione di un motore, è sufficiente scambiare tra loro i due fili del motore stesso.
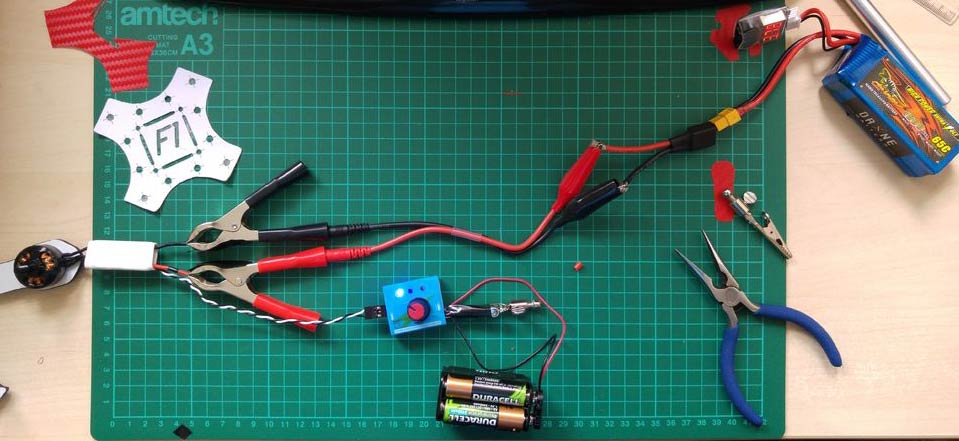
Figura 9: rilevamento del verso di rotazione dei motori
Step 5 - saldatura dei motori all’ESC
Dissaldatura fili ESC
L’ESC dispone di un totale di 7 fili: i tre più a destra vanno collegati ai motori, mentre i fili rosso e nero a sinistra sono per l’alimentazione. I due fili attorcigliati bianco e nero sono invece per il segnale. Occorre rimuovere i tre fili sulla destra, saldando i fili che provengono dal motore direttamente sull’ESC (Figure 10 e 11). L’operazione va ripetuta per tutti gli ESC.
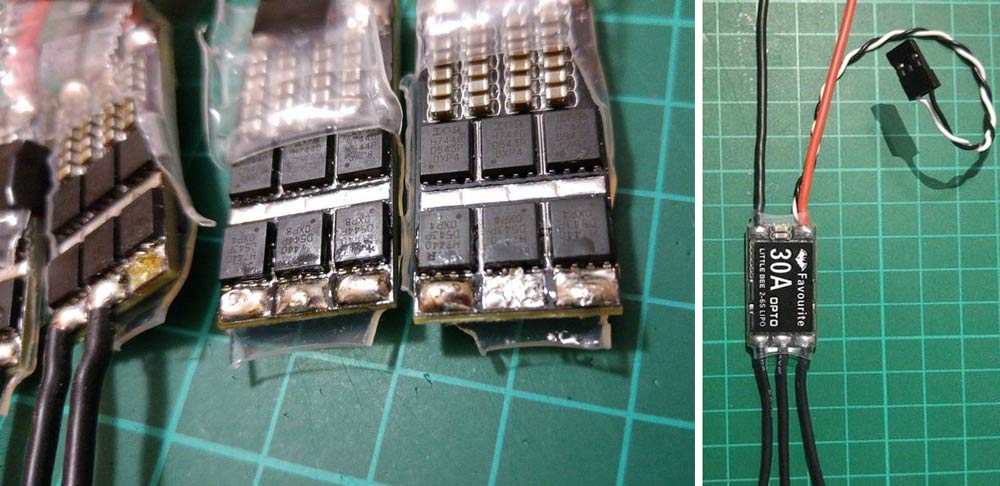
Figura 10: saldatura dei fili motore sull’ESC
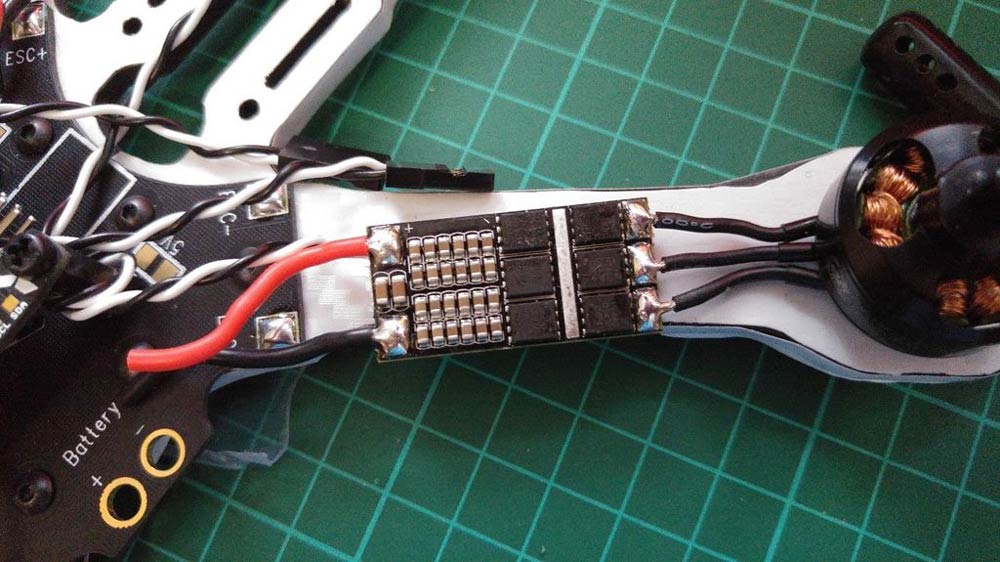
Figura 11: dettaglio delle saldature sull’ESC
Fissiamo ora i motori sul telaio usando le viti in dotazione.
Posizionamento del motore
I quattro motori andranno posizionati secondo il seguente schema:
Avanti a sinistra: orario
Avanti a destra: antiorario
Dietro a destra: orario
Dietro a sinistra: antiorario
Le frecce gialle di Figura 12 aiutano a comprendere cosa si vuole ottenere.
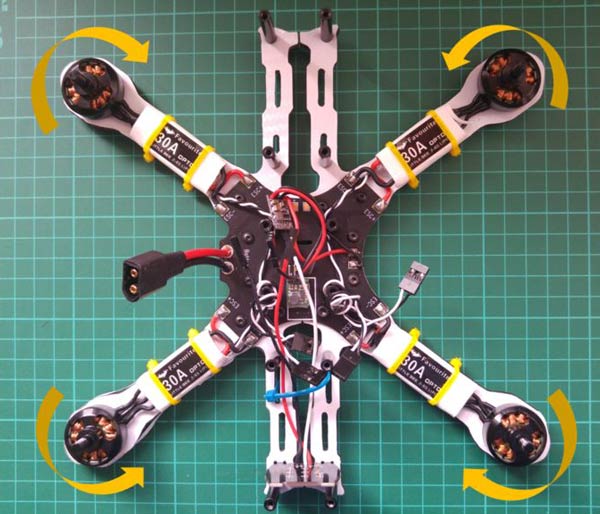
Figura 12: motori e verso di rotazione
Il motivo per cui tutti i motori non possono avere lo stesso verso di rotazione è legato alla coppia: ogni motore produce, infatti, una coppia con direzione opposta a quella con cui gira l’elica. Se tutti i motori girassero nello stesso verso, il quadricottero girerebbe su se stesso, e l’asse yaw diverrebbe totalmente incontrollabile.
Step 6 - saldatura dell’ESC al PDB
Prima di saldare gli ESC al PDB, posizionare il dissipatore sull’ESC. Gli ESC KISS hanno dei pad che, se ponticellati, invertono il verso di rotazione del motore (Figura 13). Con gli ESC Littlebee, invece, è possibile invertire la direzione dei motori utilizzando il software di programmazione BLHeli.
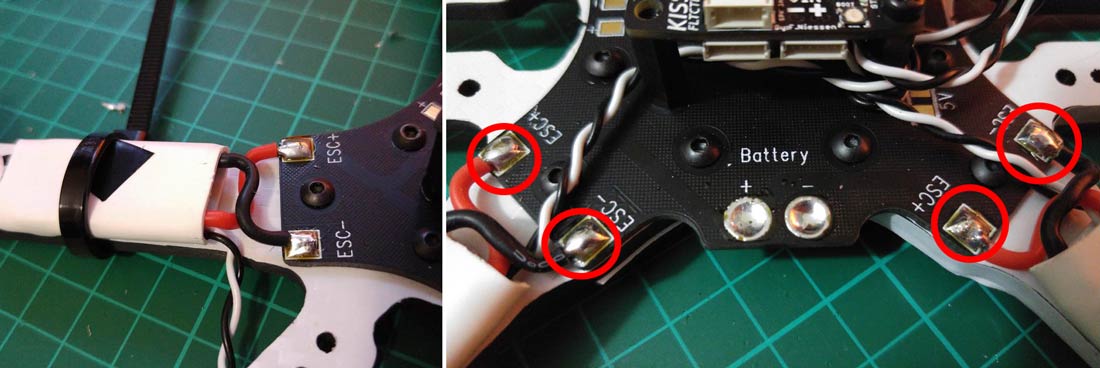
Figura 13: saldatura dei fili sull’ESC
Completate le saldature, occorre fissare gli ESC al telaio utilizzando delle fascette, o anche del nastro isolante.
Saldatura dell’XT60 al PDB
Il connettore XT60 preparato in precedenza va ora collegato al PDB. Il filo rosso va collegato al polo positivo e il filo nero al polo negativo (Figura 14).
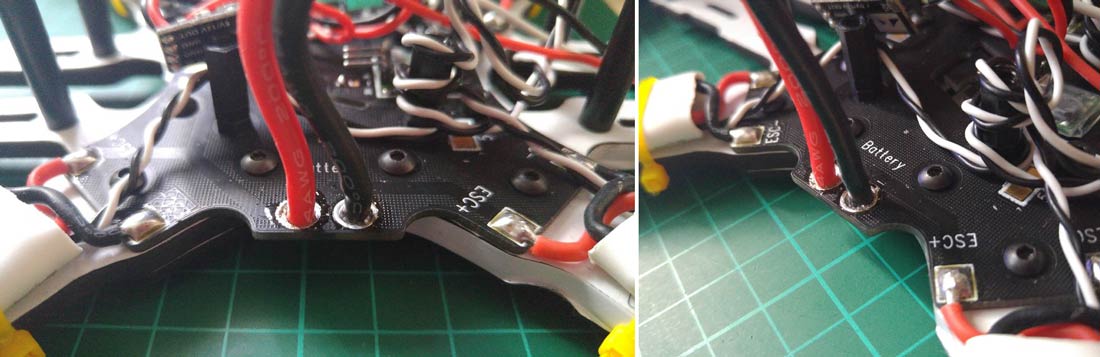
Figura 14: collegamenti cavetto XT60
Step 7 - aggiunta degli accessori
Il quadricottero può essere impreziosito dall’aggiunta di alcuni accessori opzionali, quali strisce di led colorati, oppure dei cicalini (buzzer). I led sono molto utili come guida per l’orientamento, mentre i buzzer sono utili come guida quando il quadricottero subisce un crash, e non risulta facile individuare il punto dell’impatto.
Buzzer
Alcuni flight controller dispongono di contatti specifici per il buzzer (Figura 15). Per aggiungere al quadricottero questo componente, è sufficiente saldare il filo positivo al contatto positivo del flight controller e procedere in modo analogo per il contatto negativo. [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2770 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:
Computer Vision 1.01 – Filtraggi
Streaming di temperatura e umidità con l’ecosistema Big Data – Parte 1
Servomotori e Raspberry Pi: come usarli con il computer single board

Protocollo a conoscenza zero: come migliorare la privacy nella blockchain

Veramente un ottimo tutorial. Penso che ne farò ampio uso questa estate. Ho visto ci vuole tanta pazienza e attenzione. Grazie!