
Vi affascinano questi strani oggetti volanti a quattro eliche? Vi siete sempre chiesti come funziona uno dei cosiddetti Droni? In questo articolo tratteremo i principali componenti di un Drone, di modo da poter introdurre anche i meno esperti al funzionamento di queste affascinanti macchine.
In questi ultimi anni si è sentito parlare molto dei Droni. Ha fatto parlare molto di sÈ il Drone postino di Amazon ma non è stato l'unico a diventare famoso. Inoltre ci sono state anche molte gaffe ed incomprensioni a questo riguardo. Si dice che qualcuno facesse confusione tra Droni ed Androidi. E noi ben sappiamo che Androidi non sono. Ma a cosa ci si riferisce esattamente con Drone? È una parola che è stata usata in molti campi, da diverse persone, e spesso anche in contesti Fantasy ma oggi sappiamo che i Quadricotteri, gli Esacotteri, e tutti gli N cotteri vengono comunemente chiamati Droni.
Secondo alcuni esperti non è del tutto corretto chiamare Drone gli N-Cotteri, inoltre non esistono solo Droni con la configurazione ad N-Cottero ma è pur vero che la maggior parte dei non addetti ai lavori di questo settore, con la parola Drone, si riferisce proprio agli N-Cotteri. Quindi per comodità e per adeguarci a questa tendenza comune, in questo articolo, con la parole Drone, ci riferiremo agli N-Cotteri.
In questo articolo prenderemo in esame “l'anatomia di un Drone”, ed essendo più specifici dei Quadricotteri in generale. Sarà un articolo dedicato alla loro comprensione, un'introduzione, non un articolo tecnico ed approfondito. Voglio aiutare coloro che sono curiosi di comprendere meglio cosa sono e come sono fatti questi piccoli robot volanti. Inoltre inserirò anche delle parti che possono aiutare a rispondere alle domande più comuni a questo riguardo: a che altezza volano? Quanto pesano? Cos'è l'FPV?
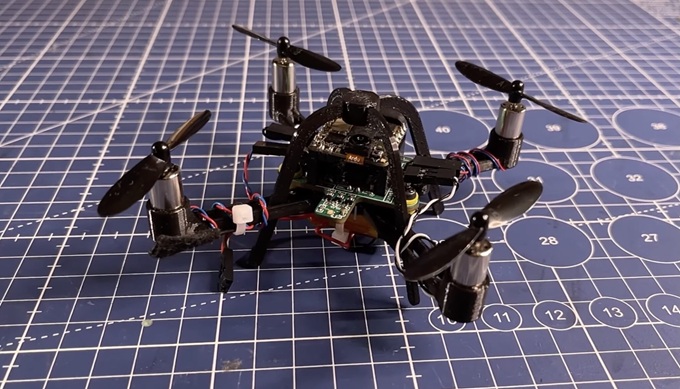
Prima di tutto guardiamo alcune foto. Quelli che vedete sono Quadricotteri.



image credits: Wikipedia, Flickr - RetroCactus, ProjectEMS
Peso
Il loro peso varia da poche centinaia di grammi a più di 20 kg. Per quanto riguarda i Quadricotteri è però difficile trovare modelli commerciali, usati per videoriprese, etc che pesino più di 20 kg. I modelli più comuni pesano meno di 2 kg. Per farvi un esempio pratico, anche io ho un drone, lo uso per fare delle semplici rilevazioni ambientali e pesa poco meno di 0,5 kg.
Altezza
La maggior parte dei Quadricotteri amatoriali e civili volano a partire da un'altezza di pochi metri fino ad alcune centinaia. Tutto dipende dal tipo di sistema di controllo, dai motori etc. Con un setup particolare è però possibile portare gli N-Cotteri (sia quadricotteri che non) ad altezze decisamente elevate. Esistono dei video su YouTube in cui vengono mostrati dei multi rotori che superano il kilometro di altezza. Tutto dipende dal setup.
Flight Controller + IMU: Il Cuore del Quadricottero

Si tratta dell'unità che processa i dati di volo. Si occupa sia di mantenere il Quadricottero “in equilibrio” durante il volo sia di innumerevoli altri compiti. Le funzioni svolte da ciascun Flight Controller cambiano a seconda dell'Hardware e del Software dello stesso. Esistono Flight Controller commerciali ma ne esistono anche versioni Open Source altamente personalizzabili, vedete ad esempio l'ArduPilotMega. Il prima citato ArduPilotMega, permette anche di far volare il proprio Quadricottero in maniera del tutto autonoma, semplicemente inserendo alcuni WayPoint GPS. Per approfondimenti vi consigliamo il sito della 3DR, la casa madre. Ogni Flight Controller si interfaccia ad, o è dotato internamente di, un'unità IMU, ovvero Inertial Measurement Unit; si tratta di un insieme di componenti elettronici che sono fondamentali per un corretto funzionamento del Quadricottero. L'IMU compie misurazioni inerziali, può contenere componenti come Giroscopio, Barometro, Altimetro, etc.
Sistema di controllo radio
Il sistema radio, nella maggior parte dei casi, è composto da un “radiocomando” e da un ricevitore apposito che si interfaccia con il Flight Controller. La frequenza più comune per i Quadricotteri ma anche per gli aereomodelli in generale è la 2.4 GHz. Si potrebbe scrivere moltissimo a questo riguardo, parlando di frequenze, marchi, canali, portata. Tuttavia, ai fini dell'articolo, preferisco limitarmi a questa semplice introduzione. Questo è un esempio di “radiocomando” a 7 canali con frequenza 2.4 GHz preso dal catalogo Conrad.
Le Li-Po: Le batterie del drone
Non sto nominando uno strano trattamento medico-chirurgico ma una tipologia ben specifica di batterie! Li-Po è l'abbreviazione di Lithium-ion Polymer Batteries, ovvero Batterie ai Polimeri di Litio. Questa tipologia di batterie è apparsa in commercio intorno alle 1996, in precedenza erano un'invenzione sovietica strettamente riservata. Il loro vero vantaggio è che non è necessario alcun contenitore di metallo; provo a spiegarmi meglio ed in maniera semplice: la batteria è più leggera rispetto a quelle tradizionali, quindi si ha, con un minor peso, una maggior potenza. Ecco perché sono largamente utilizzate per alimentare i Quadricotteri. Ma non solo: vengono, in generale, ampiamente usate in tutto il modellismo aereo. La maggior parte dei Quadricotteri in commercio, se non tutti, sono alimentati ad elettricità grazie a queste batterie. Anche il catalogo Conrad contiene delle batterie Li-Po, ed eccone un esempio.
ESC: Electronic Speed Control

Sono quella parte del multirotore che collega il Flight Controller ai motori Brushless. Visivamente si presentano come un insieme di cavi nella cui parte centrale è posizionata una piccola scheda elettronica. Ne esistono di varie tipologie, possono contenere un diverso Firmware e l'amperaggio cambia da modello a modello. Ecco un esempio preso direttamente dal catalogo Conrad.
Motori

La maggior parte dei Quadricotteri usati per le riprese aeree usa motori brushless, ovvero motori “senza spazzole”. Esistono anche dei modelli più piccoli che usano dei classici motori a spazzole ma sono solitamente dei modelli “giocattolo”. Difficilmente dei motori a spazzole vengono montati su Quadricotteri professionali. I motori Brushless necessitano dei prima citati ESC o Electronic Speed Controller. A differenza dei motori a spazzole, che possono funzionare anche senza. Un esempio di Motore Brushless lo possiamo prendere direttamente dal catalogo Conrad.
Frame - Telaio

image credits: Flickr - Carlesm
Forse il nome di questo mini paragrafo dice già tutto ma, per sicurezza, provo ad approfondire anche questo aspetto. Il telaio dei Quadricotteri può essere costruito in varie maniere. Può essere comprato, può essere stampato mediante stampante 3D, può essere costruito partendo da componenti domestici. Dipende dall'uso che se ne desidera fare e dal budget che si vuole investire in esso. Inoltre i telai possono essere di diversi materiali, legno, plastica, alluminio, carbonio, etc. Per i Quadricotteri più piccoli, una delle caratteristiche più ricercate nel telaio è la possibilità di sostituire “i bracci”, ovvero la possibilità di cambiare una sola delle quattro estensioni, senza dover sostituire il telaio intero. Questo perché non è raro, dopo una caduta accidentale, o durante le prime lezioni di volo, trovare il proprio Quadricottero danneggiato a livello di telaio.
FPV: la visuale in prima persona
A riguardo di questo argomento si potrebbe scrivere un articolo intero. Lo si può fare anche per gli argomenti trattati prima ma ciò che riguarda l'FPV e le telecamere è davvero vasto ed esistono molte scelte, opinioni, pareri e setup di cui varrebbe la pena discutere. Oggi proverò ad essere un po' più “corto” nella spiegazione. FPV stà per First Person View, ovvero visuali in prima persona. Ed indica quel veicolo (o quei veicoli) in grado di fornire al pilota una visuale in tempo reale di quello che la macchina sta vedendo, direttamente dal punto di vista della macchina. I sistemi di FPV più comuni sono composti da una micro telecamera ed un trasmettitore montati sulla macchina, ed uno schermo ed un ricevitore montati sulla ground station. La frequenza più comunemente usata è 5,8 GHz ma esistono diversi standard ampiamente diffusi, e sopratutto questa non è l'unica frequenza usata.
Spero che questo articolo sia stato di vostro gradimento e che possa avervi aiutato ad avvicinarvi al mondo degli N-Cotteri, o droni. Ed allo stesso tempo spero che possa avervi aiutato a comprendere meglio il loro funzionamento. Era ovviamente un articolo introduttivo, non una guida tecnica completa ed approfondita. Ho cercato di fornire una panoramica al riguardo del funzionamento di queste affascinanti e complesse macchine. Se siete interessati all'argomento non dimenticate di venirmi a trovare online.

scusa la domanda ma qual è la differenza tra droni e androidi?
E’ capitato più di una volta (non sto scherzando, Noemi, mia collega conferma) che dei clienti venissero da noi e ci chiedessero dei servizi riguardanti gli Androidi. Inizialmente siamo rimasti un po “stupiti”, ma dopo poco ci fu chiaro che si trattava di un semplice disguido a livello di parole, semplicemente non gli era chiara la differenza tra i due termini 😉
Inulte dire che dopo aver riso assieme dell’accaduto ci siamo capiti ed è andato avanti tutto serenamente (=
Anche a me non è del tutto chiara.
Provo a rispondere alla tua domanda linkando Wikipedia.
Sono sicuro che Wikipedia contiene una risposta più completa di quella che scriverei io =P
http://it.wikipedia.org/wiki/Aeromobile_a_pilotaggio_remoto
http://it.wikipedia.org/wiki/Androide
Spero di essere stato di aiuto!
Mi sapreste consigliare un drone per iniziare con un prezzo di circa 100 euro ?
Grazie per il commento.
Esistono vari quadricotteri di piccole dimensioni che possono essere acquistati per quella cifra.
Esistono tante varianti e tanti modelli. Il mio consiglio è quello di confrontare diverse offerte su diversi shop online.
In alternativa, se desideri acquistare un piccolo drone, e con lo stesso effettuare anche un corso di pilotaggio, colgo l’occasione per segnalarti un corso organizzato dallo stesso gruppo di professionisti presso il quale lavoro:
http://shop.projectems.it/prodotto/corso-di-pilotaggio-micro-droni/
Spero di aver risposto alla tua domanda in modo completo.
Andrea
Ciao a tutti sono novellina nel campo dei droni…stiamo facendo un progetto per l’università e avrei bisogno di sapere che ingombro hanno gli elementi ELECTRONIC SPEED CONTROL, LI-PO (trovata), RICEVITORE, FLIGHT CONTROLLER + IMU. Aiuto!!