Questo articolo introdurrà innanzitutto la specifica relativa all'immunità ai transitori di modo comune (CMTI) e la sua importanza in un sistema. Verrà discussa una nuova famiglia di modulatori sigma-delta isolati, le relative prestazioni e come questi facilitino le misure di corrente del sistema e ne migliorino l'accuratezza, in particolare per quanto riguarda l'errore di offset e la sua deriva. Infine, verrà presentata una soluzione circuitale consigliata allo scopo.
Introduzione
I modulatori isolati sono ampiamente utilizzati su motori/inverter per i quali si richiede un’elevata precisione di misura della corrente e isolamento galvanico. Con la rivoluzione dovuta all'alto livello di integrazione e l’elevata efficienza nei sistemi motore/inverter, i FET SiC e GaN stanno iniziando a sostituire i MOSFET e gli IGBT grazie alle loro dimensioni ridotte, alla frequenza di commutazione più alta e ai vantaggi offerti da un dissipatore di calore più piccolo. Tuttavia, per i componenti di isolamento è necessaria un'elevata capacità CMTI. È inoltre necessaria una misura di corrente di accuratezza maggiore. Il modulatore isolato di nuova generazione aumenta notevolmente la capacità CMTI e migliora la precisione.
Cos'è l'Immunità ai Transitori di Modo Comune?
L'immunità ai transitori di modo comune (CMTI, Common Mode Transient Immunity) specifica la velocità di salita e discesa di un impulso transitorio applicato attraverso la barriera isolante, oltre la quale vengono corrotti i segnali di clock o dati. Vengono registrate sia la velocità di variazione che la tensione assoluta di modo comune (VCM) dell'impulso.
I nuovi modulatori di isolamento sono stati testati in condizioni di CMTI statiche e dinamiche. Il test statico rileva gli errori a singolo bit del dispositivo. I test dinamici monitorano l'uscita dei dati filtrati per verificare le variazioni nelle prestazioni di rumore in seguito a un'applicazione randomizzata dell'impulso CMTI. La Figura 1 mostra uno schema a blocchi dettagliato del test.
Il CMTI è importante perché i transitori con alto slew rate (alta frequenza) possono corrompere la trasmissione dei dati attraverso la barriera isolante. Comprendere e misurare la sensibilità a questi impulsi transitori è fondamentale. I metodi di prova di ADI si basano sullo standard IEC 60747-17, che riguarda le modalità di misura dell'immunità ai transitori di modo comune (CMTI) per gli accoppiatori magnetici.
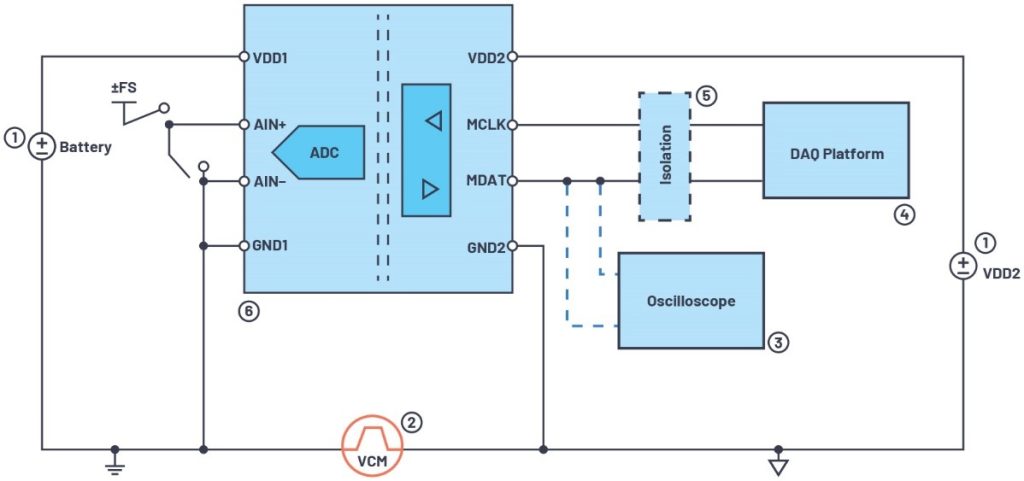
Figura 1: Schema a blocchi semplificato del test CMTI
Come Caratterizzare in Laboratorio il CMTI per un Modulatore Isolato
La piattaforma di prova CMTI illustrata in Figura 1 include i seguenti componenti:
► Alimentazione a batteria per VDD1/VDD2.
► Un generatore di impulsi di modo comune ad alta tensione.
► Un oscilloscopio per monitorare i dati.
► Una piattaforma di acquisizione dati per la relativa analisi e un filtro sinc3 per la decimazione 256 usato per un modulatore isolato.
► Un modulo di isolamento (di solito si usa l’isolamento ottico).
► Un modulatore isolato.
Per il test CMTI statico e dinamico si utilizza la stessa piattaforma, variano soltanto i segnali di ingresso. Questa piattaforma può essere utilizzata anche per testare le prestazioni CMTI di altri prodotti isolati. Nel caso dei modulatori isolati, il flusso di dati one-bitstream viene decimato e filtrato, per essere poi trasferito al loop di controllo del sistema di gestione del motore, per cui il test dinamico CMTI risulterà più completo e utile. La Figura 2 e la Figura 3 mostrano le prestazioni del test dinamico CMTI nel dominio del tempo e della frequenza con diversi livelli di CMTI. Dalla Figura 2 si può notare che lo spur diventa più grande quando si aggiunge un segnale transitorio VCM più elevato per lo stesso modulatore isolato. Quando il segnale transitorio VCM supera le specifiche del modulatore isolato, nel dominio del tempo appare uno spur molto pronunciato (come indicato nella Figura 2c). Questo ha gravi conseguenze nell’utilizzo di un sistema di controllo per motori, provocando un ripple considerevole sulla coppia.
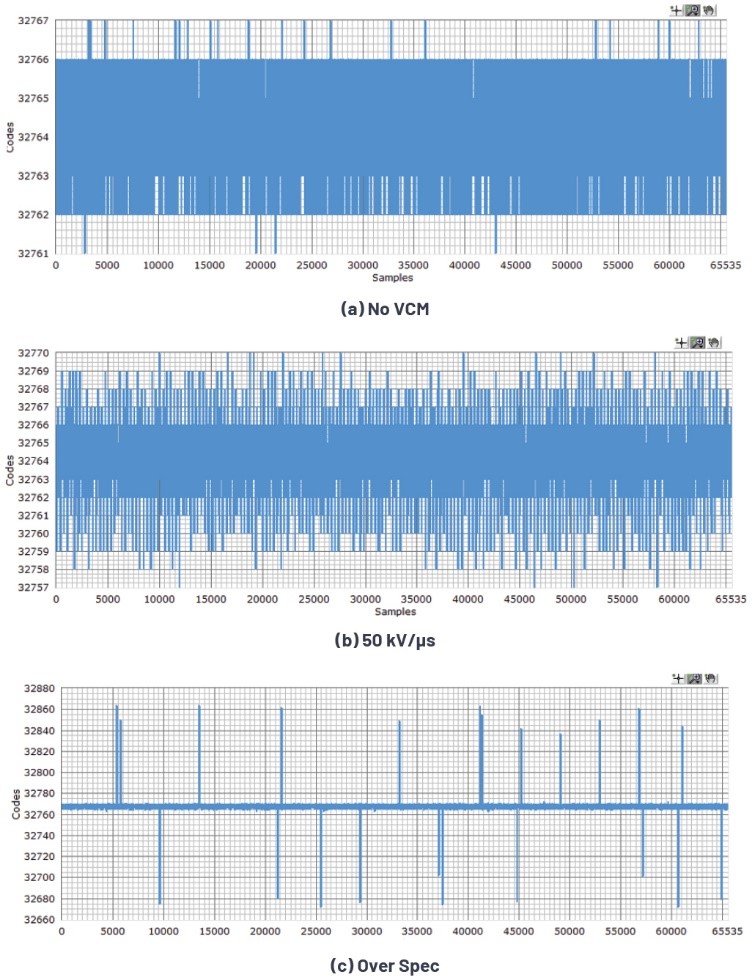
Figura 2: Prestazioni del test CMTI dinamico nel dominio del tempo
La Figura 3 mostra le prestazioni nel dominio FFT in presenza di diversi transitori in frequenza (il che significa mantenere costante l’ampiezza del segnale VCM modificando invece il periodo del transitorio stesso). I risultati della Figura 3 mostrano che le armoniche sono strettamente correlate alla frequenza del transitorio. Pertanto, maggiore è la capacità CMTI del modulatore di isolamento, minore è il livello di rumore nell'analisi FFT. Rispetto ai modulatori isolati di generazione precedente, la prossima generazione di dispositivi ADuM770x aumenta la capacità CMTI da 25 kV/μs a 150 kV/μs, migliorando notevolmente l'immunità ai transitori del sistema, come illustrato nei dati di confronto riportati nella Tabella 1.
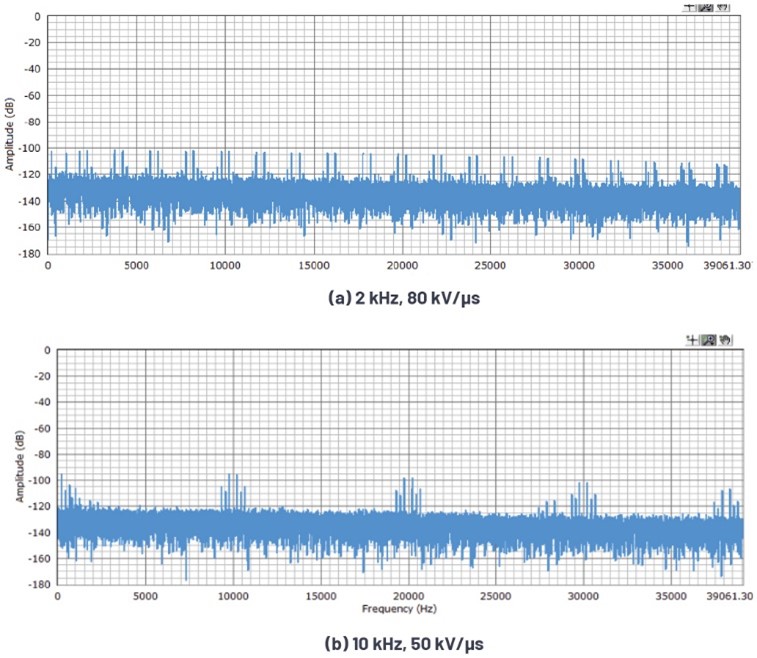
Figura 3: Prestazioni del test CMTI dinamico nel dominio della frequenza
Tecnica di Compensazione e Calibrazione a Livello di sistema
In un sistema di controllo motore o inverter, maggiore è l'accuratezza dei dati sui valori di corrente, più stabile ed efficiente è il sistema. Offset e guadagno sono fonti di errore DC piuttosto comuni negli ADC. La Figura 4 mostra come gli errori di offset e di guadagno influenzino la funzione di trasferimento dell'ADC. In un sistema, questi errori possono manifestarsi sotto forma di ripple di coppia o di velocità. Per limitare il loro impatto nella maggior parte dei sistemi, questi errori possono essere calibrati a temperatura ambiente.

Figura 4: Errore di offset e di guadagno nella funzione di trasferimento di un ADC
Al contrario, la deriva dell'offset e gli errori di guadagno sull'intero intervallo di temperatura costituiscono un problema, poiché sono più difficili da compensare. A condizione che la temperatura del sistema sia nota, per i convertitori con profili di deriva lineari e prevedibili la compensazione degli errori di offset e guadagno da deriva termica è possibile (anche se è costosa e richiede tempo), aggiungendo un fattore di compensazione al profilo di deriva dell'offset per renderlo il più piatto possibile. Questo metodo di compensazione dettagliato è descritto nella nota applicativa AN-1377. Esso può ridurre il valore di deriva specificato nei data sheet di AD7403/AD7405 fino al 30% per l’offset e fino al 90% per il guadagno, e può essere applicato a qualsiasi altro componente del convertitore quando si desidera migliorare l'errore da deriva termica di offset e guadagno a livello di sistema.
Come si Utilizza la Tecnica di “Chopping”
In alternativa, per un progettista di sistemi può risultare più efficiente e conveniente usare una tecnica chiamata “chopping”, che può anche essere integrata efficacemente nel silicio stesso per ridurre al minimo gli errori di deriva di offset e guadagno. Lo schema del chopping è illustrato nella Figura 5, dove la soluzione implementata su un ADC consiste nell’intervenire sull'intera catena del segnale analogico per eliminare ogni errore di offset e di bassa frequenza.
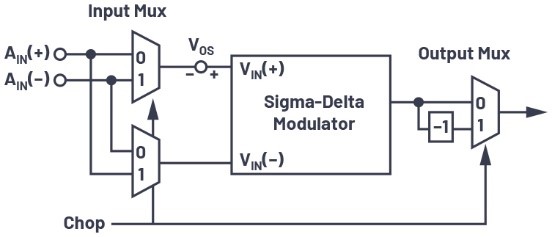
Figura 5: Chopping
L'ingresso differenziale al modulatore viene alternativamente invertito (“chopped”) dal multiplexer d'ingresso e per ogni fase di “chop” viene eseguita una conversione ADC (commutando il mux allo stato "0" o "1"). Prima di passare il segnale di uscita al filtro digitale, il chopping del modulatore viene invertito nel multiplexer di uscita.
Se l'offset nel modulatore sigma-delta è rappresentato come VOS, l'uscita è (AIN(+) - AIN(-)) + VOS quando il chop è 0 e l'uscita è -[(AIN(-) - AIN(+)) + VOS] quando il chop è 1. La tensione di errore, VOS, viene rimossa mediando questi due risultati nel filtro digitale, ottenendo (AIN (+) - AIN (-)), che equivale alla tensione differenziale di ingresso senza alcuna componente di offset.
L'ultimo modulatore isolato rilasciato da ADI migliora le prestazioni relative all'errore di offset e di guadagno grazie all’ottimizzazione del circuito analogico interno e utilizzando la più recente tecnica di chopping, che semplifica notevolmente il progetto del sistema e riduce i tempi di calibrazione. Gli ultimi dispositivi ADuM770x presentano il più alto livello di isolamento e le migliori prestazioni del convertitore ADC. È disponibile anche una versione con LDO, che può semplificare la progettazione dell'alimentazione del sistema.
Tabella 1: Confronto delle Specifiche Principali
|
Specifica Principale |
ADuM7701/ ADuM7703 | ADuM7702/ ADuM7704 |
AD7403 |
AD7401 |
|
|
Isolamento |
Tensione Nominale
(VPK) |
1270 | 1270 | 1250 | 891 |
| CMTI (kV/μs) (min) | 150 | 150 | 25 | 25 | |
|
Prestazione |
Errore di Offset
(mV max) |
±0,18 | ±0,18 | ±0,75 | ±0,6 |
| Deriva di Offset
(μV/°C max) a 50 mV |
— | ±0,25 (16-pin)
±0,6 (8-pin) |
— | — | |
| Deriva di Offset
(μV/°C max) a 250 mV |
±0,6 | — | 3,8 | 3,5 | |
| Errore di Guadagno (%FSR max) | ±0,2 | ±0,2 | ±1,2 | ±0,3 | |
| Deriva di Guadagno (ppm/°C) a 50 mV | — | ±15,6 (typ)
±31,3 (max) |
— | — | |
| Deriva di Guadagno (ppm/°C) a 250 mV | ±12,5 (typ)
±28 (max) |
— | 65 (typ)
95 (max) |
36 (typ) | |
| ENOB (bit) a 50 mV | — | 14,2 (typ)
13,1 (min) |
— | — | |
| ENOB (bit) a 250 mV | 14 (typ)
13,3 (min) |
— | 14.2 (typ)
13,1 (min) |
11,5
(typ) |
|
| Integrazione | LDO | No | Si | No | No |
|
Package |
8-pin e 16-pin |
8-pin e 16-pin |
8-pin e 16-pin |
16-pin |
|
Circuito e Layout Raccomandati
Nella Figura 6 viene mostrato il tipico circuito di misura di corrente di un sistema di controllo motore. Sebbene questo sistema richieda tre circuiti di misura della corrente, uno per ogni fase, nello schema a blocchi ne viene illustrato solo uno. Gli altri due circuiti sono identici e sono indicati dalle linee tratteggiate blu. Dal circuito di misura della corrente di fase si può notare che un lato del resistore RSHUNT è collegato all'ingresso dell'ADuM770x-8. L'altro lato è collegato ai FET ad alta tensione (che possono essere IGBT o MOSFET) e al motore. Quando i FET ad alta tensione cambiano stato si verificano sempre condizioni di sovratensione, sottotensione o altre situazioni di instabilità elettrica. Di conseguenza, la fluttuazione di tensione del resistore RSHUNT passerà all'ADuM770x-8 e i relativi dati verranno ricevuti sul pin DATA. La progettazione del layout e dell'isolamento del sistema può migliorare o peggiorare le condizioni di instabilità di tensione, che influiscono sulla precisione della misura della corrente di fase.
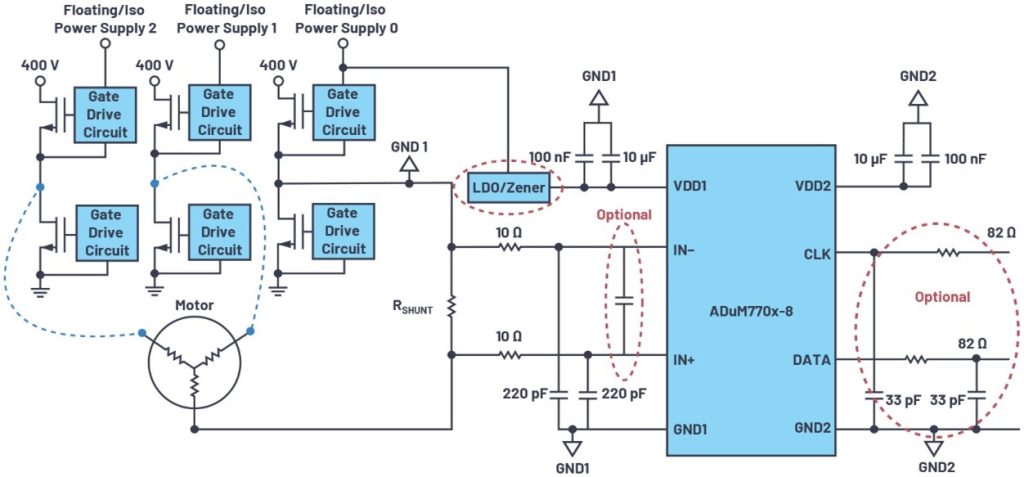
Figura 6: Circuito tipico per la misura della corrente in un sistema di controllo motore
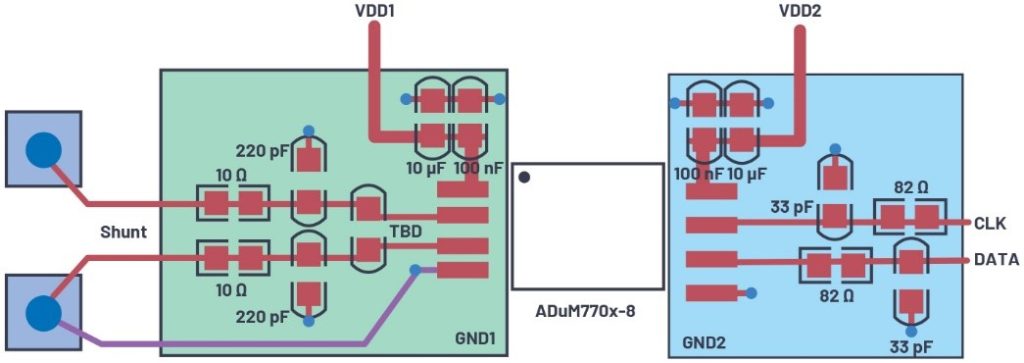
Figura 7: Layout del PCB raccomandato per un circuito con ADuM770x-8
L'implementazione circuitale consigliata, come illustrato nella Figura 6, prevede quanto segue:
- Per disaccoppiare VDD1/VDD2, sono necessari condensatori da 10 μF/100 nF che devono essere collocati il più possibile in prossimità dei pin corrispondenti.
- È necessario un filtro RC da 10 Ω/220 pF.
- Per ridurre gli effetti del rumore proveniente dallo shunt si raccomanda l’utilizzo di un condensatore opzionale, da collocare sulla linea differenziale in prossimità dei pin IN+/IN– (si consiglia di scegliere il package 0603).
- Quando la pista digitale d’uscita è lunga, si raccomanda di installare un filtro RC da 82 Ω/33
- Per ottenere buone prestazioni, si dovrebbe utilizzare un doppino intrecciato e schermato.
- Per i requisiti di prestazioni più elevate, si può valutare l’utilizzo di un resistore di shunt a 4-terminali.
Per ottenere le prestazioni migliori, è necessario anche un buon layout. Quello consigliato è illustrato nella Figura 7. Per migliorare la capacità di reiezione di modo comune, si consiglia di collegare la coppia differenziale dalla resistenza shunt ai pin di ingresso IN+/IN-. Il filtro da 10 Ω/220 pF deve essere posizionato il più vicino possibile ai pin di ingresso IN+/IN-. I condensatori di disaccoppiamento da 10 μF/100 nF devono essere posizionati vicino ai pin di alimentazione VDD1/VDD2. Per migliorare la stabilità del segnale si raccomanda di implementare il piano di massa GND1 sotto il relativo circuito di ingresso. La pista GND1 indipendente (indicata in viola e parallela alla linea di collegamento della coppia differenziale), deve essere collegata a stella dalla resistenza shunt al pin GND dell'ADuM770x-8, per ridurre l'effetto di fluttuazione della corrente di alimentazione.
Conclusione
I più recenti modulatori sigma-delta isolati ADuM770x aumentano il CMTI fino al livello di 150 kV/μs e migliorano le prestazioni di deriva in temperatura, fornendo grandi vantaggi alle applicazioni di misura della corrente. L'utilizzo del circuito e del layout consigliati potrà risultare utile in fase di progettazione.
Riferimenti
Data sheet ADuM7704 . Analog Devices, Inc., Agosto 2020.
Heo, Hong-Jun; Seon-Ik Hwang; Jang-Mok Kim e Jin-Woo Choi. “Compensating of Common Scaling Current-Measurement Error for Permanent Magnet Synchronous Motor Drives.” 2016 IEEE 8° Conferenza Internazionale “Power Electronics and Motion Control” (IPEMC-ECCE Asia), Maggio 2016.
Mary McCarthy: “AN-1131: Chopping on the AD7190, AD7192, AD7193, AD7194, and AD7195.” Analog Devices, Inc., Ottobre 2011.
Miguel Usach Merino e Gerard Mora Puchalt: “Integrated Capacitive PGAs in ADCs: Redefining Performance.” Analog Dialogue, Vol. 50, No. 3, Agosto 2016.
Nicola O’Byrne: “MS-2652: Measurement Techniques for Industrial Motion Control.” Analog Devices, Inc., Giugno 2014.
Si ringrazia, per la collaborazione con Elettronica Open Source, Nandin Xu, Product Applications Engineer, Analog Devices.
![]()

