
In questo articolo presentiamo due progetti innovativi open source, entrambi basati sulla piattaforma di prototipazione rapida Arduino, le cui finalità non sono soltanto didattiche, ma anche pratiche, con la possibilità di migliorare la qualità della vita di molte persone.
Introduzione
Il primo progetto permetterà infatti di controllare remotamente un piccolo robot o veicolo radiocomandato tramite il movimento (gestualità) della mano. Il secondo progetto consentirà invece di realizzare un vero e proprio bastone elettronico per non vedenti, in grado di segnalare la presenza di ostacoli lungo il cammino tramite vibrazione tattile e segnalazione acustica.
Primo progetto: controllo gestuale per robot
Aggiungere a un piccolo robot una funzionalità avanzata come il controllo gestuale è più semplice di quanto si possa immaginare. Il progetto si compone di due parti: un trasmettitore e un ricevitore. Il trasmettitore andrà opportunamente modificato in modo tale da inviare i controli gestuali sotto forma di comandi. Come piattaforma di sviluppo verrà utilizzato Arduino, il quale riconoscerà i gesti e i movimenti della mano utilizzando come sensore un comune accelerometro.
Materiale richiesto
I componenti richiesti per la realizzazione del progetto sono elencati di seguito:
- accelerometro ADXL335;
- scheda Arduino;
- modulo ricetrasmittente RF Module 434-MHz;
- circuito integrato encoder HT12E;
- circuito integrato decoder HT12D;
- circuito integrato per il pilotaggio dei motori;
- basetta general purpose;
- motore elettrico a 12v/9v;
- alimentazione 12/9v;
- regolatore di tensione 7805;
- telaio per robot (opzionale), eventualmente autocostruito. Al seguente link una panoramica di articoli sui robot e le relative tecnologie.
Principio di funzionamento
Il principale sensore utilizzato in questo progetto è rappresentato da un accelerometro a tre assi di tipo ADXL335. Accelerometri di questo tipo (si osservi la Figura 1) sono ampiamente utilizzati sui dispositivi mobile (smartphone e tablet) per numerose applicazioni, tra cui le notifiche e i giochi (ad esempio Temple Run).
Figura 1: l’accelerometro ADXL335
Il cervello del robot è rappresentato dalla board Arduino Uno (Atmega32) che, accompagnata da un opportuno software (sketch), è in grado di riconoscere il movimento gestuale in base ai dati forniti dall’accelerometro. Lo schema a blocchi dell’applicazione è visibile in Figura 2.
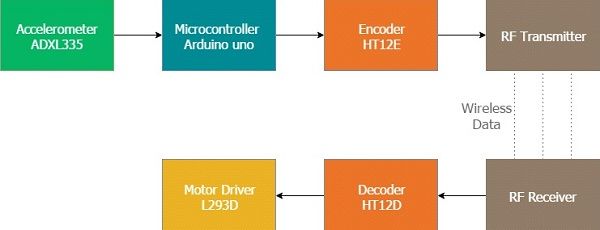
Figura 2: schema a blocchi del progetto
L’accelerometro legge le cooordinate X Y Z associate ai movimenti della mano, e le invia ad Arduino. In questa applicazione non siamo interessati ai valori misurati lungo l’asse Z, per cui utilizzeremo soltanto i valori relativi alle coordinate X e Y. Lo sketch Arduino controlla i valori delle coordinate ricevuti, e invia un’informazione composta da 4 bit (funzione dei valori di X e Y) all’encoder. L’encoder, a sua volta, inoltra i dati verso il trasmettitore RF. I dati trasmessi da quest’ultimo vengono ricevuti dal ricevitore RF, che invia i 4 bit dati al circuito decoder. Questo esegue la decodifica dei dati e inoltra la corrispondente informazione decodificata al circuito del driver per motore. Infine, il driver per i motori decide in quale [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2460 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

Demodulare un segnale QPSK con Python
#5 Regole d’oro nella progettazione PCB per applicazioni di segnali veloci
Caratterizzazione di una camera CCD

Comunicazioni satellitari nella nuova era spaziale: un’indagine e sfide future

Veramente un bell’articolo Stefano, molto completo in ogni sua parte e, soprattutto, utile per chi vuole scendere fin nell’Elettronica per costruirlo (cioe’, per quelli come me che si saldano le dita quando ci provano 🙂 ).
Anche l’idea di recuperare parti da cellulari dismessi e’ molto bella.
Grazie per i complimenti, Riccardo. In effetti questo genere di progetti ha una valenza duale: da un lato permette di accrescere il proprio bagaglio di conoscenze realizzando dei progetti pratici, dall’altro consente di creare degli ausili elettronici in grado di sopperire a una funzionalità fisica in qualche modo lesa. Bisogna poi tenere presente anche l’aspetto socio-economico: noi viviamo in un contesto tutto sommato “ricco”, dove le persone possono contare sull’assistenza sanitaria, ma esistono ancora molte zone del mondo dove ciò non avviene e l'”arte di arrangiarsi” può a volte fare la differenza.
Tempo fa ho realizzato per un amico un modulo a inseguitore solare, che muoveva un pannellino da 60/80W, facendogli gestire in automatico l’escursione quotidiana e riposizionandosi a fine corsa per il “mattino” successivo.
Il tutto era realizzato con 2 Arduino che si parlavano in Bluetooth (1 cervello che permetteva la programmazione remota dell’attuatore).
Avevo usato 2 shield Bluetooth, per gestire il tutto.
Volevo chiederti, dalla tua esperienza, che vantaggi/svantaggi si hanno a preferire la soluzione RF con una soluzione Bluetooth. Io ho “istintivamente scelto la seconda, poiche’ mi avrebbe permesso di estendere il sistema e usare uno Smartphone in modo nativo. Pero’ immagino ci siano pro e contro…tipo range di distanza, consumo etc etc.
Hai voglia di darmi 2 dritte di confronto, per una conoscenza personale piu’ che altro?
ti ringrazio come sempre
Penso che per l’applicazione da te descritta l’interfaccia Bluetooth rappresenti una buona soluzione, tenendo presente che oggi è disponibile anche la versione BLE che garantisce assorbimenti di potenza molto ridotti. In genere questa è la scelta obbligata sugli attuali dispositivi wearable. Con il Bluetooth non si raggiungono velocità di trasferimento molto elevate e la distanza tra i dispositivi è un fattore importante. Poi c’è il discorso che il Bluetooth è regolamentato in modo severo, quindi se si producono dei dispositivi da immettere sul mercato commerciale (non penso sia il tuo caso) occorre seguire scrupolosamente lo standard BLE, soprattutto per quanto concerne la gestione dei profili, attributi, ID, ecc. in modo tale che il dispositivo sia compatibili con le app software e altri dispositivi di terze parti. Un’alternativa al Bluetooth è quella di usare moduli RF a 2,4 GHz (come quelli basati sul chip nRF24L01 della Nordic), disponibili a poco prezzo e facilmente utilizzabili anche su Arduino. In questo caso si può arrivare anche a rate di 2 Mbps e coprire distanze di oltre 100 metri (in condizioni ottimali, ovviamente). In campo IoT si utilizzano anche delle soluzioni sub-GHz, caratterizzate da trasmissioni a lunga distanza (paragonabili a quelle della rete mobili grazie all’utilizzo della NarrowBand IoT disponibile con i maggiori provider), basso assorbimento e basso data rate. Vengono utilizzate soprattutto per gli smart meter, dove i dati da trasmettere sono pochi.
Ti ringrazio Stefano, hai chiarito miei dubbi. Io non ho necessita’ di rivendere cio’ che ho fatto ne quindi di attenermi a standard, ma ho capito cosa intendi. Ho esperienza di CAN/CANOpen e, anche se ambiti diversi, anche li’ si tratta di adeguarsi a profili, device, classi etc etc in modo molto rigoroso. Chiaramente se vuoi vendere, non ci sono alternative (immagino ci sia poi anche una messa in collaudo per verificare il protocollo etc etc, robe che ho sempre considerato di una noia mortale, ma pur facenti parte del lavoro).
La soluzione a RF e’ sicuramente interessante e magari in futuro mi capiterà di usarla. La mia scelta, come detto sopra, e’ stata cmq dettata dal fatto di poter estendere il tutto inserendo dei moduli nativi da Smartphone. chiaramente a quel punto si trattava di inventare un protocollo applicativo montato sul Bluetooth e interpretato quindi da un’app Android/iOS. Ma mi sono fermato prima.
Anche sullo ZigBee non molto esperienza, ma immagino sia simile al tuo approccio, solo con un protocollo diversi. Alla fine sono tutte soluzioni simili, piu’ o meno performanti a seconda dell’uso. grazie
Egregio ingegner Lovati, avendo trovato molto interessante l’articolo riguardante la realizzazione di un bastone elettronico per non vedenti, Le chiedo se mi è possibile utilizzarlo per lavoro scolastico con presentazione PowerPoint . La ringrazio anticipatamente, confidando in una sollecita risposta.
Salve, la ringrazio per l’interesse mostrato nei confronti di questo articolo e in particolare il progetto di bastone elettronico per non vedenti. In merito alla sua richiesta, può inoltrarla alla redazione, inviando una mail tramite il pulsante verde “supporto” che trova a fondo pagina, sulla destra. Le risponderanno in breve tempo, fornendo tutte le indicazioni necessarie. Grazie e saluti.
Salve Stefano,
sono interessato al progetto sul bastone per non vedenti ma prima di acquistare l’abbonamento o l’articolo, volevo capire una cosa. Il progetto si riferisce allo stesso bastone che si trova su internet sviluppato dai ragazzi dell’IPSIA Ferraris di Catanzaro e/0 simile ai tanti modelli che ora si trovano in commercio, oppure come si vede in figura, si tratta di un prototipo montato solo sul guanto che poi attraverso sensori che partono dalla mano restituisce dei segnali sonori o tattili (vibrazioni)?
Grazie anticipatamente,
P.T.
Buongiorno,
poiché lei non è ancora abbonato, immagino non riesca ad accedere a tutto il contenuto dell’articolo, il quale presenta non uno ma due progetti distinti: un bastone “smart” da utilizzarsi come ausilio per i non vedenti e un guanto altrettanto “smart” per il controllo gestuale di un piccolo robot. Non le so dire se il progetto del bastone elettronico sia lo stesso di quello da lei citato. A questo proposito le consiglio di inviare una mail alla Redazione cliccando sull’apposito tasto verde “supporto” in fondo alla pagina esponendo il suo quesito.
Grazie mille Stefano, sì lo farò sicuramente. Buona giornata,
Paolo