In questo articolo analizzeremo gli Z8 Encore!, in particolare come pilotare i motori brushless attraverso questi microcontrollori.
Introduzione
Lo Zilog Z8 Encore! è un microcontrollore a 8 bit prodotto da Zilog (Figura 1 e 3) e basato sulla popolare architettura Z8. Lo Z8 Encore! offre un ampio spettro di caratteristiche per l’uso in sistemi embedded. La più evidente è la presenza di tre canali DMA per leggere, ad esempio, da tre convertitori analogico-digitale (ADC). Caratteristiche del microcontrollore (variabili a seconda del modello): alimentazione a 3,3 Volt, DRAM da 256 byte, frequenza di clock di 20 MHz, memoria flash integrata fino a 12 KiB, ADC con risoluzione di 10 bit, 2 interfacce seriali sincrone. Il set istruzioni dello Z8 Encore! è compatibile con quello dello Z8 ma fornisce alcune estensioni utili per l’utilizzo di linguaggi di programmazione ad alto livello. In particolare, l’ambiente di sviluppo fornito dalla stessa Zilog consente di programmare il chip in ANSI C. Per lo sviluppo, lo Z8 Encore! è dotato di una interfaccia di debug a livello di singolo pin.
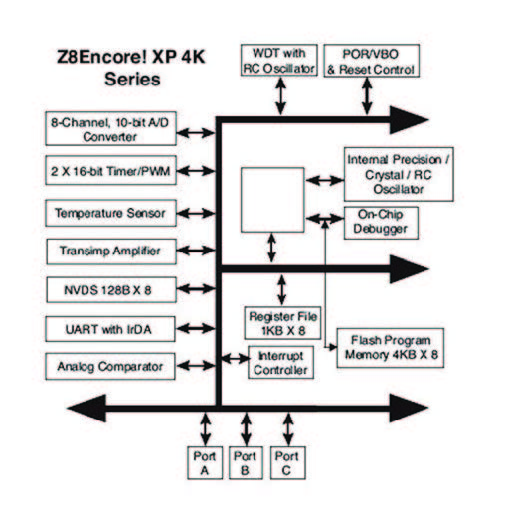
Figura 1: Zilog Z8 Encore!
MOTORI BRUSHLESS
I motori brushless sono motori sincroni trifasi a magneti permanenti, i cui avvolgimenti statorici (in genere connessi a stella) sono alimentati da un inverter VSI, lo stato dei quali tasti viene controllato in base al segnale fornito da un sensore di posizione (Figura 2), in modo tale da cercare di ottenere che la distribuzione delle correnti statoriche si modifichi in sincronia con la posizione del rotore, e il relativo campo magnetico statorico sia sempre in anticipo di 90° elettrici rispetto al campo magnetico rotante rotorico. Il campo di applicazione dei motori brushless, anche se attualmente circoscritto a potenze medio-piccole (50 kW), è in notevole crescita sia in campo industriale (macchine utensili a controllo numerico, automazione industriale, robotica), sia in campo civile (macchine da ufficio, attrezzature mediche, elettrodomestici), sia in campo aerospaziale, sia nel campo della trazione leggera. I motori brushless trovano, infatti, sempre più numerose applicazioni in quanto, a spese di una certa ondulazione di coppia e di maggiori costi, presentano molti vantaggi rispetto ai tradizionali motori sia a corrente continua che asincroni. In particolare, richiedono poca manutenzione, non hanno praticamente limitazioni ambientali, sono molto affidabili e silenziosi, hanno elevate prestazioni dinamiche, rendimento, rapporto coppia-dimensioni e campo di variazione della velocità, semplicità di controllo e agevole asportazione del calore.
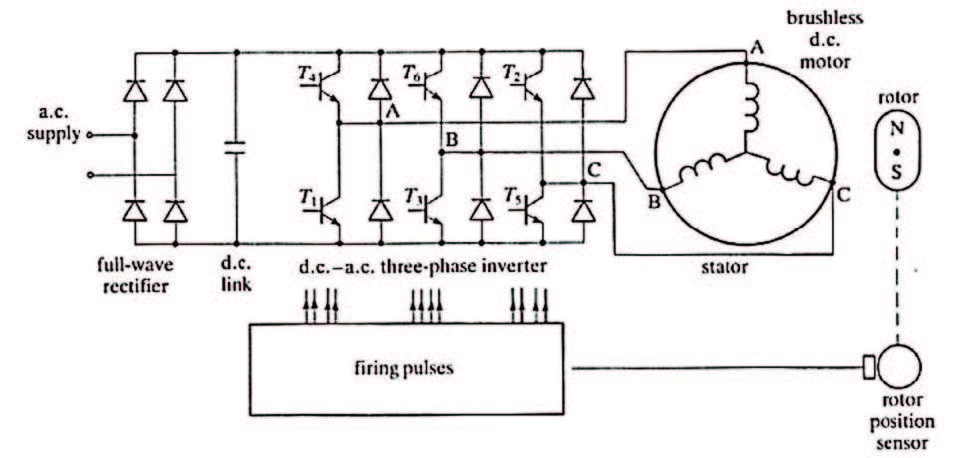
Figura 2: Motore Brushless
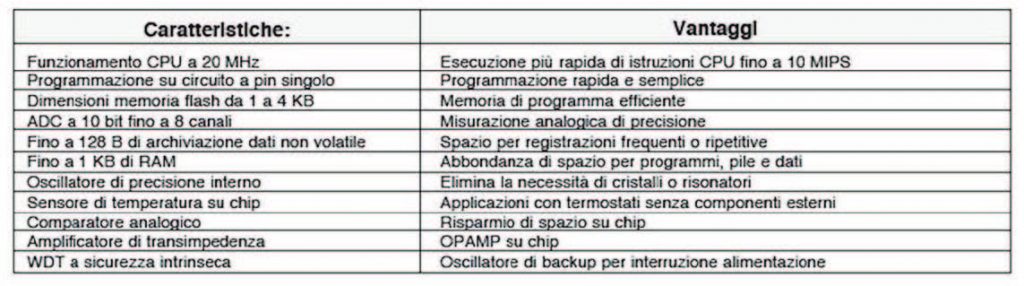
Figura 3: Caratteristiche e funzionalità, Z8
APPLICAZIONE
In questa applicazione, viene implementato il controllo sensorless con una forma d’onda trapezoidale. Questa implementazione è molto comune nei piccoli motori BLDC utilizzati in molti elettrodomestici e in altri prodotti base di consumatori. Un diagramma a blocchi del sistema di controllo del motore BLDC, basato sulla MCU Z8FMC16100 (Figura 5 e 6), è mostrato in Figura 4.
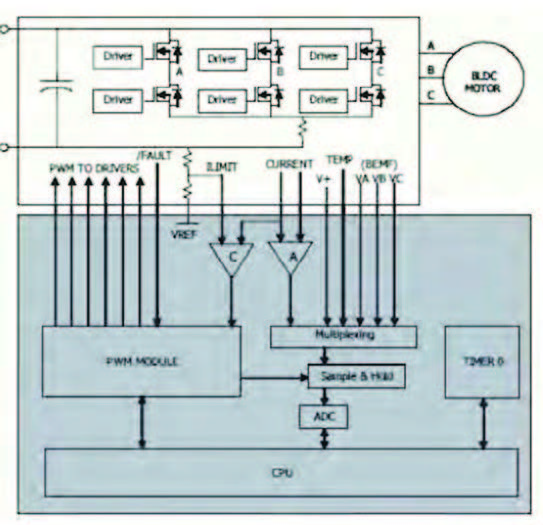
Figura 4: Diagramma a blocchi
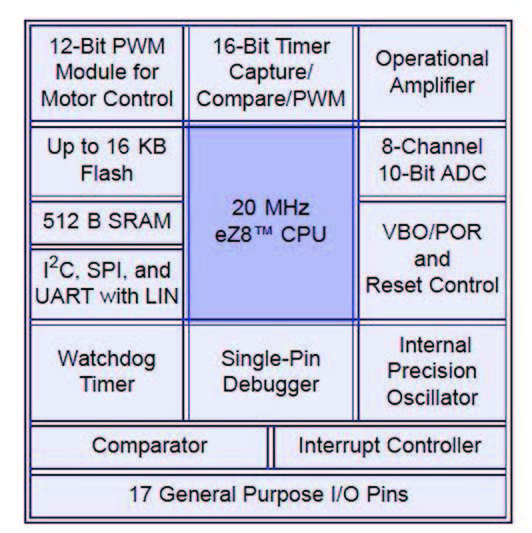
Figura 5: Z8FMC16100
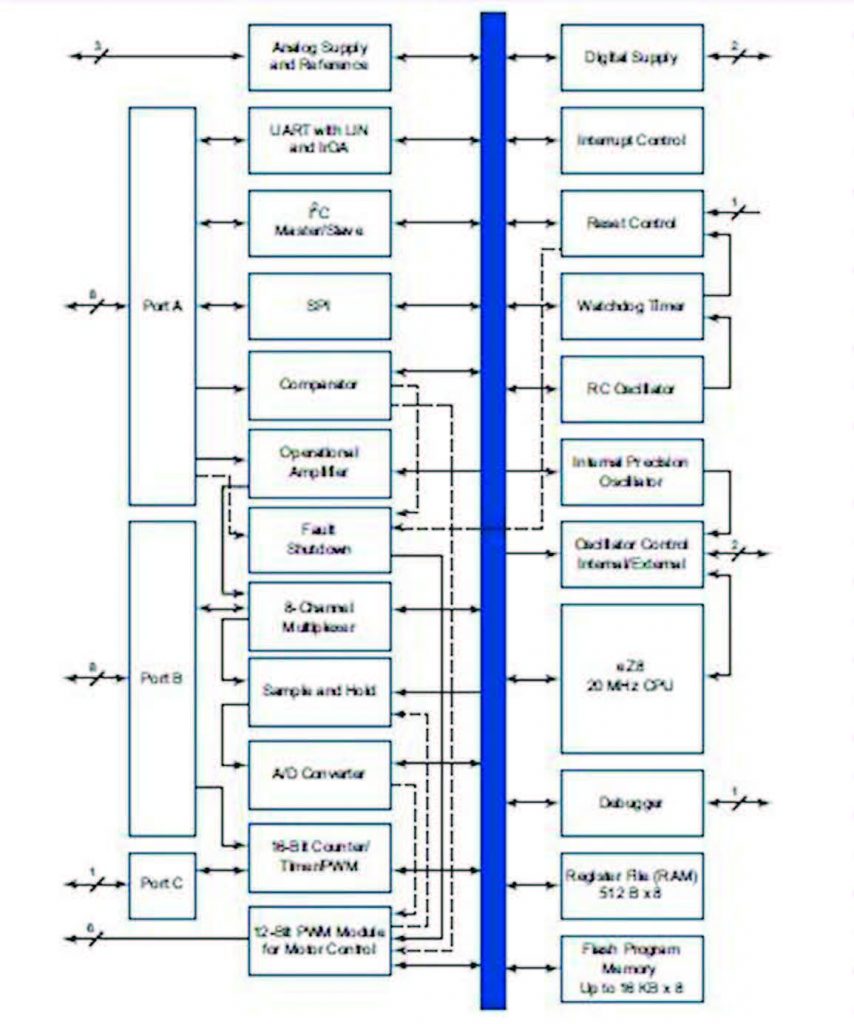
Figura 6: Architettura Z8FMC16100
In un accordo alle 3 fasi di commutazione, in un dato momento, solo due fasi sono eccitate. La tensione EMF posteriore viene successivamente generata nell’avvolgimento di fase e al passaggio per lo zero della tensione indotta è rilevata per la sincronizzazione dai successivi eventi di controllo feedback. L’algoritmo per il rilevamento dei campi elettromagnetici si basa sulla realizzazione di un Phase Locked Loop (PLL). Esso permette di creare un segnale la cui fase ha una relazione fissa con quella di un segnale di riferimento. Il PLL è, inoltre, un classico esempio di applicazione all’elettronica del controllo in retroazione. Un PLL è particolarmente vantaggioso durante l’avvio, con un conseguente progressivo aumento della velocità del motore e una inversione quasi istantanea del senso di rotazione. Nel metodo convenzionale, durante la sequenza di avvio, la potenza è applicata agli avvolgimenti per posizionare il rotore in una posizione di partenza nota, seguito da commutazione ed inizio di rilevamento EMF e di controllo.
In contrasto, l’approccio PLL implementato permette di agganciare il segnale EMF indietro fin dalla fase di avviamento, senza la necessità di fissare la posizione iniziale del motore. Inoltre, questo approccio riduce notevolmente il movimento irregolare del motore durante l’avvio o l’inversione della direzione. La Z8 Encore! MC ™ famiglia di microcontrollori (Figura 3) offre fino a 16 kb di memoria Flash e si basa su Zilog advanced eZ8 8-bit core, che fornisce la regolazione dei motori a velocità variabile. Il target di applicazioni sono grandi apparecchi, HVAC, automazione industriale ed elettronica di consumo. In ciascun Zilog Z8 Encore!, l’architettura interna consente la realizzazione di un numero maggiore di funzioni di controllo tra cui un Time Stamp per il controllo della velocità, un amplificatore integrato e la risposta di errore (Figura 7 e 8).
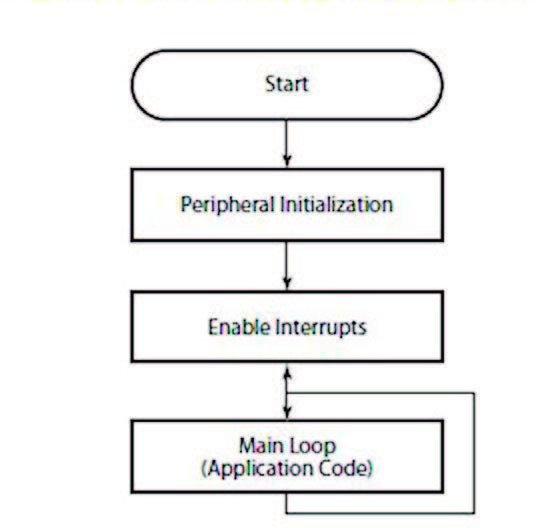
Figura 7: Architettura Software
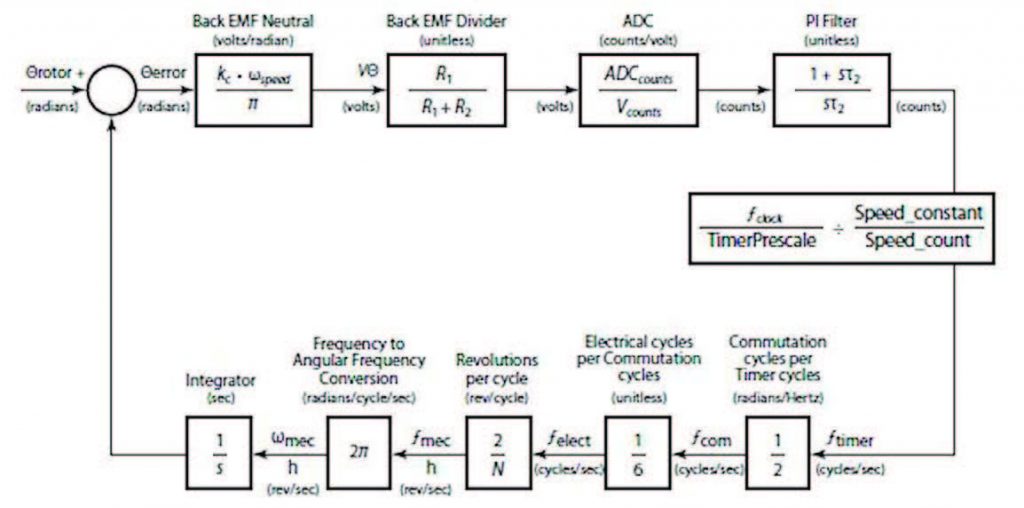
Figura 8: Algoritmo di applicazione