I motori a corrente continua hanno tantissime applicazioni, dai semplici elettrodomestici passando per i giocattoli. In questo articolo presentiamo delle soluzioni per controllare un motore DC con la scheda di sviluppo Arduino UNO (clicca qua per averla in omaggio!). Il motore DC a corrente continua ha due fili attraverso i quali è sufficiente alimentarlo per farlo muovere in una specifica direzione. L’interno è composto da un magnete permanente, un’elettrocalamita e dei contatti striscianti. L’obiettivo è regolare attraverso un potenziometro/trimmer la velocità del motore e nello stesso tempo fornire un sistema di feedback in relazione alla temperatura fornita dal sensore TMP36 presente nel kit. Nel progetto verrà implementato anche un buzzer per segnalare l’incremento della velocità del motore.
Introduzione
Un motore a corrente continua appartiene ad una classe di macchine elettriche che converte l’energia elettrica a corrente continua in una meccanica. I tipi più comuni basano il proprio funzionamento sulle classiche leggi derivanti dai campi magnetici. Quasi tutti i tipi di motori a corrente continua hanno qualche meccanismo interno, elettromeccanico o elettronico, che permette di cambiare periodicamente la direzione del flusso di corrente del motore (figura 1).

Figura 1: principio di funzionamento di un motore DC
La velocità del motore a corrente continua può essere controllata in un ampio intervallo, utilizzando una tensione di alimentazione variabile. I piccoli motori DC sono utilizzati in utensili, giocattoli ed elettrodomestici. I motori DC di grandi dimensioni, invece, sono utilizzati nella propulsione di veicoli elettrici, ascensori e montacarichi. I dispositivi L293 e L293D sono IC driver quadrupole ad alta corrente half-H, progettati per fornire correnti di pilotaggio bidirezionali fino a 1 A. L293D, impiegato nel progetto per controllare il motore DC alimentato con una batteria da 9 V, è progettato per fornire correnti di pilotaggio bidirezionali fino a 600 mA con tensioni da 4,5 V a 36 V. Entrambi i dispositivi sono progettati per pilotare carichi induttivi come relè, solenoidi e motori DC, nonché altri carichi ad alta corrente / alta tensione in applicazioni di alimentazione controllata. Ogni uscita è un circuito di azionamento con un transistor Darlington abilitati a coppie, con i driver 1 e 2 abilitati dai pin 1,2EN e i driver 3 e 4 abilitati dai pin 3,4EN (Figura 2).
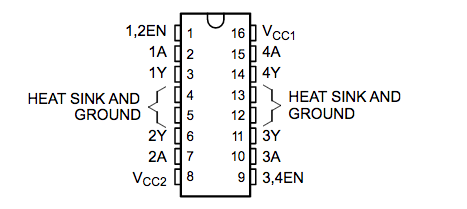
Figura 2: Pinout del circuito integrato L293D
Il progetto
L’obiettivo che ci prefiggiamo è quello di controllare la velocità del motore per mezzo di un potenziometro o trimmer, con l'ausilio di un buzzer per controllare la velocità attraverso l'emissione di suoni. Nel progetto abbiamo anche implementato il sensore di temperatura TMP36 per controllare, in un secondo approccio, la velocità del motore in relazione alla temperatura. Il circuito equivalente per la famiglia di sensori TMP3x è mostrato in Figura 3.
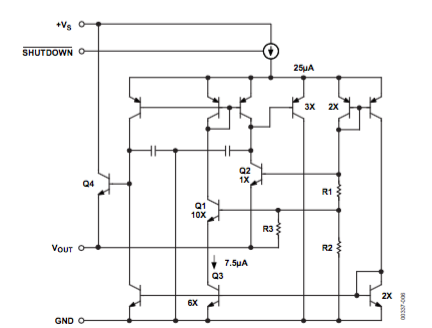
Figura 3: Circuito interno del sensore di temperatura TMP36
Il nucleo del sensore di temperatura (band gap core) comprende i transistori Q1 e Q2, polarizzato da Q3 a circa 8 μA. Il nucleo band gap opera sia su Q1 che su Q2 allo stesso livello di corrente del collettore. Tuttavia, poiché l'area dell'emettitore di Q1 è 10 volte quella di Q2, VBE di Q1 e Q2 non sono uguali:
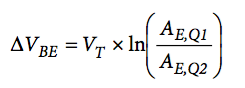 I resistori R1 e R2 vengono utilizzati per scalare questo valore al fine di produrre la caratteristica funzione di trasferimento della tensione di uscita di ciascun sensore di temperatura; contemporaneamente, R2 e R3 sono utilizzati per scalare VBE di Q1 come termine di offset in VOUT. La tensione di uscita del sensore di temperatura è disponibile sulll'emettitore di Q4, il guadagno di corrente di quest'ultimo, invece, imposta il limite di corrente di corto circuito a 250 μA. L’obiettivo del progetto è controllare la velocità del motore in funzione della temperatura letta, quindi aumentarla o diminuirla a seconda del riscaldamento indicato [...]
I resistori R1 e R2 vengono utilizzati per scalare questo valore al fine di produrre la caratteristica funzione di trasferimento della tensione di uscita di ciascun sensore di temperatura; contemporaneamente, R2 e R3 sono utilizzati per scalare VBE di Q1 come termine di offset in VOUT. La tensione di uscita del sensore di temperatura è disponibile sulll'emettitore di Q4, il guadagno di corrente di quest'ultimo, invece, imposta il limite di corrente di corto circuito a 250 μA. L’obiettivo del progetto è controllare la velocità del motore in funzione della temperatura letta, quindi aumentarla o diminuirla a seconda del riscaldamento indicato [...]
ATTENZIONE: quello che hai appena letto è solo un estratto, l'Articolo Tecnico completo è composto da ben 2166 parole ed è riservato agli ABBONATI. Con l'Abbonamento avrai anche accesso a tutti gli altri Articoli Tecnici che potrai leggere in formato PDF per un anno. ABBONATI ORA, è semplice e sicuro.

Ti potrebbe interessare anche:

Progetto di un misuratore di corrente elettrica basato sul sensore ad effetto Hall ACS712 – Parte 3
Pianificazione ottima per un robot E-Puck con feedback visivo

EC-LUE: una app nata da Google Earth Engine
La gestione energetica nelle tecnologie per lo spazio

Consiglio di provare ad implementare insieme a questo circuito, anche qualche LED contenuto nel kit per dare un andamento della velocità. Un piccolo esercizio che aiuta ad approfondire le conoscenze per chi è alle prime armi con Arduino 😉 p.s. qua il link del corso base http://it.emcelettronica.com/iniziare-da-zero-con-il-kit-arduino-introduzione-e-primi-programmi